Compare commits
20 Commits
4aa8302613
...
backup
| Author | SHA1 | Date | |
|---|---|---|---|
|
bcb9934778
|
|||
|
3e4ab04fe3
|
|||
|
c20921eded
|
|||
|
f294d6094c
|
|||
|
adf92b3886
|
|||
|
ec5dc0975a
|
|||
|
07ba46a75f
|
|||
|
272d264a07
|
|||
|
6d8e21bb80
|
|||
|
91e0f9264f
|
|||
|
fc6a086ca2
|
|||
|
d9498b8135
|
|||
|
621fbc043b
|
|||
| 691a26574a | |||
|
53b8cbe7d4
|
|||
| ada885c54f | |||
|
7b43836f14
|
|||
|
37bcb4823a
|
|||
|
e4a2c21224
|
|||
|
bc998288b6
|
644
converters/diagrams.lua
Normal file
@@ -0,0 +1,644 @@
|
||||
--[[
|
||||
diagram – create images and figures from code blocks.
|
||||
|
||||
MIT License
|
||||
|
||||
Copyright © 2019-2023 Albert Krewinkel
|
||||
Copyright © 2019 Thorsten Sommer
|
||||
Copyright © 2018 Florian Schätzig
|
||||
Copyright © 2018 John MacFarlane
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
]]
|
||||
-- The filter uses the Figure AST element, which was added in pandoc 3.
|
||||
PANDOC_VERSION:must_be_at_least '3.0'
|
||||
|
||||
local version = pandoc.types.Version '1.2.0'
|
||||
|
||||
-- Report Lua warnings to stderr if the `warn` function is not plugged into
|
||||
-- pandoc's logging system.
|
||||
if not warn then
|
||||
-- fallback
|
||||
warn = function(...) io.stderr:write(table.concat({ ... })) end
|
||||
elseif PANDOC_VERSION < '3.1.4' then
|
||||
-- starting with pandoc 3.1.4, warnings are reported to pandoc's logging
|
||||
-- system, so no need to print warnings to stderr.
|
||||
warn '@on'
|
||||
end
|
||||
|
||||
local io = require 'io'
|
||||
local pandoc = require 'pandoc'
|
||||
local system = require 'pandoc.system'
|
||||
local utils = require 'pandoc.utils'
|
||||
local List = require 'pandoc.List'
|
||||
local stringify = utils.stringify
|
||||
local with_temporary_directory = system.with_temporary_directory
|
||||
local with_working_directory = system.with_working_directory
|
||||
|
||||
--- Returns a filter-specific directory in which cache files can be
|
||||
--- stored, or nil if no such directory is available.
|
||||
local function cachedir ()
|
||||
local cache_home = os.getenv 'XDG_CACHE_HOME'
|
||||
if not cache_home or cache_home == '' then
|
||||
local user_home = system.os == 'windows'
|
||||
and os.getenv 'USERPROFILE'
|
||||
or os.getenv 'HOME'
|
||||
|
||||
if not user_home or user_home == '' then
|
||||
return nil
|
||||
end
|
||||
cache_home = pandoc.path.join{user_home, '.cache'} or nil
|
||||
end
|
||||
|
||||
-- Create filter cache directory
|
||||
return pandoc.path.join{cache_home, 'pandoc-diagram-filter'}
|
||||
end
|
||||
|
||||
--- Path holding the image cache, or `nil` if the cache is not used.
|
||||
local image_cache = nil
|
||||
|
||||
local mimetype_for_extension = {
|
||||
jpeg = 'image/jpeg',
|
||||
jpg = 'image/jpeg',
|
||||
pdf = 'application/pdf',
|
||||
png = 'image/png',
|
||||
svg = 'image/svg+xml',
|
||||
}
|
||||
|
||||
local extension_for_mimetype = {
|
||||
['application/pdf'] = 'pdf',
|
||||
['image/jpeg'] = 'jpg',
|
||||
['image/png'] = 'png',
|
||||
['image/svg+xml'] = 'svg',
|
||||
}
|
||||
|
||||
--- Converts a list of format specifiers to a set of MIME types.
|
||||
local function mime_types_set (tbl)
|
||||
local set = {}
|
||||
local mime_type
|
||||
for _, image_format_spec in ipairs(tbl) do
|
||||
mime_type = mimetype_for_extension[image_format_spec] or image_format_spec
|
||||
set[mime_type] = true
|
||||
end
|
||||
return set
|
||||
end
|
||||
|
||||
--- Reads the contents of a file.
|
||||
local function read_file (filepath)
|
||||
local fh = io.open(filepath, 'rb')
|
||||
local contents = fh:read('a')
|
||||
fh:close()
|
||||
return contents
|
||||
end
|
||||
|
||||
--- Writes the contents into a file at the given path.
|
||||
local function write_file (filepath, content)
|
||||
local fh = io.open(filepath, 'wb')
|
||||
fh:write(content)
|
||||
fh:close()
|
||||
end
|
||||
|
||||
--- Like `pandoc.pipe`, but allows "multi word" paths:
|
||||
-- Supplying a list as the first argument will use the first element as
|
||||
-- the executable path and prepend the remaining elements to the list of
|
||||
-- arguments.
|
||||
local function pipe (command, args, input)
|
||||
local cmd
|
||||
if pandoc.utils.type(command) == 'List' then
|
||||
command = command:map(stringify)
|
||||
cmd = command:remove(1)
|
||||
args = command .. args
|
||||
else
|
||||
cmd = stringify(command)
|
||||
end
|
||||
return pandoc.pipe(cmd, args, input)
|
||||
end
|
||||
|
||||
|
||||
--
|
||||
-- Diagram Engines
|
||||
--
|
||||
|
||||
-- PlantUML engine; assumes that there's a `plantuml` binary.
|
||||
local plantuml = {
|
||||
line_comment_start = [[']],
|
||||
mime_types = mime_types_set{'pdf', 'png', 'svg'},
|
||||
compile = function (self, puml)
|
||||
local mime_type = self.mime_type or 'image/svg+xml'
|
||||
-- PlantUML format identifiers correspond to common file extensions.
|
||||
local format = extension_for_mimetype[mime_type]
|
||||
if not format then
|
||||
format, mime_type = 'svg', 'image/svg+xml'
|
||||
end
|
||||
local args = {'-t' .. format, "-pipe", "-charset", "UTF8"}
|
||||
return pipe(self.execpath or 'plantuml', args, puml), mime_type
|
||||
end,
|
||||
}
|
||||
|
||||
--- GraphViz engine for the dot language
|
||||
local graphviz = {
|
||||
line_comment_start = '//',
|
||||
mime_types = mime_types_set{'jpg', 'pdf', 'png', 'svg'},
|
||||
mime_type = 'image/svg+xml',
|
||||
compile = function (self, code)
|
||||
local mime_type = self.mime_type
|
||||
-- GraphViz format identifiers correspond to common file extensions.
|
||||
local format = extension_for_mimetype[mime_type]
|
||||
if not format then
|
||||
format, mime_type = 'svg', 'image/svg+xml'
|
||||
end
|
||||
return pipe(self.execpath or 'dot', {"-T"..format}, code), mime_type
|
||||
end,
|
||||
}
|
||||
|
||||
--- Mermaid engine
|
||||
local mermaid = {
|
||||
line_comment_start = '%%',
|
||||
mime_types = mime_types_set{'pdf', 'png', 'svg'},
|
||||
compile = function (self, code)
|
||||
local mime_type = self.mime_type or 'image/svg+xml'
|
||||
local file_extension = extension_for_mimetype[mime_type]
|
||||
return with_temporary_directory("diagram", function (tmpdir)
|
||||
return with_working_directory(tmpdir, function ()
|
||||
local infile = 'diagram.mmd'
|
||||
local outfile = 'diagram.' .. file_extension
|
||||
write_file(infile, code)
|
||||
pipe(
|
||||
self.execpath or 'mmdc',
|
||||
{"--pdfFit", "--input", infile, "--output", outfile},
|
||||
''
|
||||
)
|
||||
return read_file(outfile), mime_type
|
||||
end)
|
||||
end)
|
||||
end,
|
||||
}
|
||||
|
||||
--- TikZ
|
||||
--
|
||||
|
||||
--- LaTeX template used to compile TikZ images.
|
||||
local tikz_template = pandoc.template.compile [[
|
||||
\documentclass{standalone}
|
||||
\usepackage{tikz}
|
||||
$for(header-includes)$
|
||||
$it$
|
||||
$endfor$
|
||||
$additional-packages$
|
||||
\begin{document}
|
||||
$body$
|
||||
\end{document}
|
||||
]]
|
||||
|
||||
--- The TikZ engine uses pdflatex to compile TikZ code to an image
|
||||
local tikz = {
|
||||
line_comment_start = '%%',
|
||||
|
||||
mime_types = {
|
||||
['application/pdf'] = true,
|
||||
},
|
||||
|
||||
--- Compile LaTeX with TikZ code to an image
|
||||
compile = function (self, src, user_opts)
|
||||
return with_temporary_directory("tikz", function (tmpdir)
|
||||
return with_working_directory(tmpdir, function ()
|
||||
-- Define file names:
|
||||
local file_template = "%s/tikz-image.%s"
|
||||
local tikz_file = file_template:format(tmpdir, "tex")
|
||||
local pdf_file = file_template:format(tmpdir, "pdf")
|
||||
|
||||
-- Treat string values as raw LaTeX
|
||||
local meta = {
|
||||
['header-includes'] = user_opts['header-includes'],
|
||||
['additional-packages'] = {pandoc.RawInline(
|
||||
'latex',
|
||||
stringify(user_opts['additional-packages'] or '')
|
||||
)},
|
||||
}
|
||||
local tex_code = pandoc.write(
|
||||
pandoc.Pandoc({pandoc.RawBlock('latex', src)}, meta),
|
||||
'latex',
|
||||
{template = tikz_template}
|
||||
)
|
||||
write_file(tikz_file, tex_code)
|
||||
|
||||
-- Execute the LaTeX compiler:
|
||||
local success, result = pcall(
|
||||
pipe,
|
||||
self.execpath or 'pdflatex',
|
||||
{ '-interaction=nonstopmode', '-output-directory', tmpdir, tikz_file },
|
||||
''
|
||||
)
|
||||
if not success then
|
||||
warn(string.format(
|
||||
"The call\n%s\nfailed with error code %s. Output:\n%s",
|
||||
result.command,
|
||||
result.error_code,
|
||||
result.output
|
||||
))
|
||||
end
|
||||
return read_file(pdf_file), 'application/pdf'
|
||||
end)
|
||||
end)
|
||||
end
|
||||
}
|
||||
|
||||
--- Asymptote diagram engine
|
||||
local asymptote = {
|
||||
line_comment_start = '%%',
|
||||
mime_types = {
|
||||
['application/pdf'] = true,
|
||||
},
|
||||
compile = function (self, code)
|
||||
return with_temporary_directory("asymptote", function(tmpdir)
|
||||
return with_working_directory(tmpdir, function ()
|
||||
local pdf_file = "pandoc_diagram.pdf"
|
||||
local args = {'-tex', 'pdflatex', "-o", "pandoc_diagram", '-'}
|
||||
pipe(self.execpath or 'asy', args, code)
|
||||
return read_file(pdf_file), 'application/pdf'
|
||||
end)
|
||||
end)
|
||||
end,
|
||||
}
|
||||
|
||||
--- Cetz diagram engine
|
||||
local cetz = {
|
||||
line_comment_start = '%%',
|
||||
mime_types = mime_types_set{'jpg', 'pdf', 'png', 'svg'},
|
||||
mime_type = 'image/svg+xml',
|
||||
compile = function (self, code)
|
||||
local mime_type = self.mime_type
|
||||
local format = extension_for_mimetype[mime_type]
|
||||
if not format then
|
||||
format, mime_type = 'svg', 'image/svg+xml'
|
||||
end
|
||||
local preamble = [[
|
||||
#import "@preview/cetz:0.3.4"
|
||||
#set page(width: auto, height: auto, margin: .5cm)
|
||||
]]
|
||||
|
||||
local typst_code = preamble .. code
|
||||
|
||||
return with_temporary_directory("diagram", function (tmpdir)
|
||||
return with_working_directory(tmpdir, function ()
|
||||
local outfile = 'diagram.' .. format
|
||||
local execpath = self.execpath
|
||||
if not execpath and quarto and quarto.version >= '1.4' then
|
||||
-- fall back to the Typst exec shipped with Quarto.
|
||||
execpath = List{'quarto', 'typst'}
|
||||
end
|
||||
pipe(
|
||||
execpath or 'typst',
|
||||
{"compile", "-f", format, "-", outfile},
|
||||
typst_code
|
||||
)
|
||||
return read_file(outfile), mime_type
|
||||
end)
|
||||
end)
|
||||
end,
|
||||
}
|
||||
|
||||
local default_engines = {
|
||||
asymptote = asymptote,
|
||||
dot = graphviz,
|
||||
mermaid = mermaid,
|
||||
plantuml = plantuml,
|
||||
tikz = tikz,
|
||||
cetz = cetz,
|
||||
}
|
||||
|
||||
--
|
||||
-- Configuration
|
||||
--
|
||||
|
||||
--- Options for the output format of the given name.
|
||||
local function format_options (name)
|
||||
local pdf2svg = name ~= 'latex' and name ~= 'context'
|
||||
local is_office_format = name == 'docx' or name == 'odt'
|
||||
-- Office formats seem to work better with PNG than with SVG.
|
||||
local preferred_mime_types = is_office_format
|
||||
and pandoc.List{'image/png', 'application/pdf'}
|
||||
or pandoc.List{'application/pdf', 'image/png'}
|
||||
-- Prefer SVG for non-PDF output formats, except for Office formats
|
||||
if is_office_format then
|
||||
preferred_mime_types:insert('image/svg+xml')
|
||||
elseif pdf2svg then
|
||||
preferred_mime_types:insert(1, 'image/svg+xml')
|
||||
end
|
||||
return {
|
||||
name = name,
|
||||
pdf2svg = pdf2svg,
|
||||
preferred_mime_types = preferred_mime_types,
|
||||
best_mime_type = function (self, supported_mime_types, requested)
|
||||
return self.preferred_mime_types:find_if(function (preferred)
|
||||
return supported_mime_types[preferred] and
|
||||
(not requested or
|
||||
(pandoc.utils.type(requested) == 'List' and
|
||||
requested:includes(preferred)) or
|
||||
(pandoc.utils.type(requested) == 'table' and
|
||||
requested[preferred]) or
|
||||
|
||||
-- Assume string, Inlines, and Blocks values specify the only
|
||||
-- acceptable MIME type.
|
||||
stringify(requested) == preferred)
|
||||
end)
|
||||
end
|
||||
}
|
||||
end
|
||||
|
||||
--- Returns a configured diagram engine.
|
||||
local function get_engine (name, engopts, format)
|
||||
local engine = default_engines[name] or
|
||||
select(2, pcall(require, stringify(engopts.package)))
|
||||
|
||||
-- Sanity check
|
||||
if not engine then
|
||||
warn(PANDOC_SCRIPT_FILE, ": No such engine '", name, "'.")
|
||||
return nil
|
||||
elseif engopts == false then
|
||||
-- engine is disabled
|
||||
return nil
|
||||
elseif engopts == true then
|
||||
-- use default options
|
||||
return engine
|
||||
end
|
||||
|
||||
local execpath = engopts.execpath or os.getenv(name:upper() .. '_BIN')
|
||||
|
||||
local mime_type = format:best_mime_type(
|
||||
engine.mime_types,
|
||||
engopts['mime-type'] or engopts['mime-types']
|
||||
)
|
||||
if not mime_type then
|
||||
warn(PANDOC_SCRIPT_FILE, ": Cannot use ", name, " with ", format.name)
|
||||
return nil
|
||||
end
|
||||
|
||||
return {
|
||||
execpath = execpath,
|
||||
compile = engine.compile,
|
||||
line_comment_start = engine.line_comment_start,
|
||||
mime_type = mime_type,
|
||||
opt = engopts or {},
|
||||
}
|
||||
end
|
||||
|
||||
--- Returns the diagram engine configs.
|
||||
local function configure (meta, format_name)
|
||||
local conf = meta.diagram or {}
|
||||
local format = format_options(format_name)
|
||||
meta.diagram = nil
|
||||
|
||||
-- cache for image files
|
||||
if conf.cache then
|
||||
image_cache = conf['cache-dir']
|
||||
and stringify(conf['cache-dir'])
|
||||
or cachedir()
|
||||
pandoc.system.make_directory(image_cache, true)
|
||||
end
|
||||
|
||||
-- engine configs
|
||||
local engine = {}
|
||||
for name, engopts in pairs(conf.engine or default_engines) do
|
||||
engine[name] = get_engine(name, engopts, format)
|
||||
end
|
||||
|
||||
return {
|
||||
engine = engine,
|
||||
format = format,
|
||||
cache = image_cache and true,
|
||||
image_cache = image_cache,
|
||||
}
|
||||
end
|
||||
|
||||
--
|
||||
-- Format conversion
|
||||
--
|
||||
|
||||
--- Converts a PDF to SVG.
|
||||
local pdf2svg = function (imgdata)
|
||||
-- Using `os.tmpname()` instead of a hash would be slightly cleaner, but the
|
||||
-- function causes problems on Windows (and wasm). See, e.g.,
|
||||
-- https://github.com/pandoc-ext/diagram/issues/49
|
||||
local pdf_file = 'diagram-' .. pandoc.utils.sha1(imgdata) .. '.pdf'
|
||||
write_file(pdf_file, imgdata)
|
||||
local args = {
|
||||
'--export-type=svg',
|
||||
'--export-plain-svg',
|
||||
'--export-filename=-',
|
||||
pdf_file
|
||||
}
|
||||
return pandoc.pipe('inkscape', args, ''), os.remove(pdf_file)
|
||||
end
|
||||
|
||||
local function properties_from_code (code, comment_start)
|
||||
local props = {}
|
||||
local pattern = comment_start:gsub('%p', '%%%1') .. '| ' ..
|
||||
'([-_%w]+): ([^\n]*)\n'
|
||||
for key, value in code:gmatch(pattern) do
|
||||
if key == 'fig-cap' then
|
||||
props['caption'] = value
|
||||
else
|
||||
props[key] = value
|
||||
end
|
||||
end
|
||||
return props
|
||||
end
|
||||
|
||||
local function diagram_options (cb, comment_start)
|
||||
local attribs = comment_start
|
||||
and properties_from_code(cb.text, comment_start)
|
||||
or {}
|
||||
for key, value in pairs(cb.attributes) do
|
||||
attribs[key] = value
|
||||
end
|
||||
|
||||
local alt
|
||||
local caption
|
||||
local fig_attr = {id = cb.identifier}
|
||||
local filename
|
||||
local image_attr = {}
|
||||
local user_opt = {}
|
||||
|
||||
for attr_name, value in pairs(attribs) do
|
||||
if attr_name == 'alt' then
|
||||
alt = value
|
||||
elseif attr_name == 'caption' then
|
||||
-- Read caption attribute as Markdown
|
||||
caption = attribs.caption
|
||||
and pandoc.read(attribs.caption).blocks
|
||||
or nil
|
||||
elseif attr_name == 'filename' then
|
||||
filename = value
|
||||
elseif attr_name == 'label' then
|
||||
fig_attr.id = value
|
||||
elseif attr_name == 'name' then
|
||||
fig_attr.name = value
|
||||
else
|
||||
-- Check for prefixed attributes
|
||||
local prefix, key = attr_name:match '^(%a+)%-(%a[-%w]*)$'
|
||||
if prefix == 'fig' then
|
||||
fig_attr[key] = value
|
||||
elseif prefix == 'image' or prefix == 'img' then
|
||||
image_attr[key] = value
|
||||
elseif prefix == 'opt' then
|
||||
user_opt[key] = value
|
||||
else
|
||||
-- Use as image attribute
|
||||
image_attr[attr_name] = value
|
||||
end
|
||||
end
|
||||
end
|
||||
|
||||
return {
|
||||
['alt'] = alt or
|
||||
(caption and pandoc.utils.blocks_to_inlines(caption)) or
|
||||
{},
|
||||
['caption'] = caption,
|
||||
['fig-attr'] = fig_attr,
|
||||
['filename'] = filename,
|
||||
['image-attr'] = image_attr,
|
||||
['opt'] = user_opt,
|
||||
}
|
||||
end
|
||||
|
||||
local function get_cached_image (hash, mime_type)
|
||||
if not image_cache then
|
||||
return nil
|
||||
end
|
||||
local filename = hash .. '.' .. extension_for_mimetype[mime_type]
|
||||
local imgpath = pandoc.path.join{image_cache, filename}
|
||||
local success, imgdata = pcall(read_file, imgpath)
|
||||
if success then
|
||||
return imgdata, mime_type
|
||||
end
|
||||
return nil
|
||||
end
|
||||
|
||||
local function cache_image (codeblock, imgdata, mimetype)
|
||||
-- do nothing if caching is disabled or not possible.
|
||||
if not image_cache then
|
||||
return
|
||||
end
|
||||
local ext = extension_for_mimetype[mimetype]
|
||||
local filename = pandoc.sha1(codeblock.text) .. '.' .. ext
|
||||
local imgpath = pandoc.path.join{image_cache, filename}
|
||||
write_file(imgpath, imgdata)
|
||||
end
|
||||
|
||||
-- Executes each document's code block to find matching code blocks:
|
||||
local function code_to_figure (conf)
|
||||
return function (block)
|
||||
-- Check if a converter exists for this block. If not, return the block
|
||||
-- unchanged.
|
||||
local diagram_type = block.classes[1]
|
||||
if not diagram_type then
|
||||
return nil
|
||||
end
|
||||
|
||||
local engine = conf.engine[diagram_type]
|
||||
if not engine then
|
||||
return nil
|
||||
end
|
||||
|
||||
-- Unified properties.
|
||||
local dgr_opt = diagram_options(block, engine.line_comment_start)
|
||||
for optname, value in pairs(engine.opt or {}) do
|
||||
dgr_opt.opt[optname] = dgr_opt.opt[optname] or value
|
||||
end
|
||||
|
||||
local run_pdf2svg = engine.mime_type == 'application/pdf'
|
||||
and conf.format.pdf2svg
|
||||
|
||||
-- Try to retrieve the image data from the cache.
|
||||
local imgdata, imgtype
|
||||
if conf.cache then
|
||||
imgdata, imgtype = get_cached_image(
|
||||
pandoc.sha1(block.text),
|
||||
run_pdf2svg and 'image/svg+xml' or engine.mime_type
|
||||
)
|
||||
end
|
||||
|
||||
if not imgdata or not imgtype then
|
||||
-- No cached image; call the converter
|
||||
local success
|
||||
success, imgdata, imgtype =
|
||||
pcall(engine.compile, engine, block.text, dgr_opt.opt)
|
||||
|
||||
-- Bail if an error occurred; imgdata contains the error message
|
||||
-- when that happens.
|
||||
if not success then
|
||||
warn(PANDOC_SCRIPT_FILE, ': ', tostring(imgdata))
|
||||
return nil
|
||||
elseif not imgdata then
|
||||
warn(PANDOC_SCRIPT_FILE, ': Diagram engine returned no image data.')
|
||||
return nil
|
||||
elseif not imgtype then
|
||||
warn(PANDOC_SCRIPT_FILE, ': Diagram engine did not return a MIME type.')
|
||||
return nil
|
||||
end
|
||||
|
||||
-- Convert SVG if necessary.
|
||||
if imgtype == 'application/pdf' and conf.format.pdf2svg then
|
||||
imgdata, imgtype = pdf2svg(imgdata), 'image/svg+xml'
|
||||
end
|
||||
|
||||
-- If we got here, then the transformation went ok and `img` contains
|
||||
-- the image data.
|
||||
cache_image(block, imgdata, imgtype)
|
||||
end
|
||||
|
||||
-- Use the block's filename attribute or create a new name by hashing the
|
||||
-- image content.
|
||||
local basename, _extension = pandoc.path.split_extension(
|
||||
dgr_opt.filename or pandoc.sha1(imgdata)
|
||||
)
|
||||
local fname = basename .. '.' .. extension_for_mimetype[imgtype]
|
||||
|
||||
-- Store the data in the media bag:
|
||||
pandoc.mediabag.insert(fname, imgtype, imgdata)
|
||||
|
||||
-- Create the image object.
|
||||
local image = pandoc.Image(dgr_opt.alt, fname, "", dgr_opt['image-attr'])
|
||||
|
||||
-- Create a figure if the diagram has a caption; otherwise return
|
||||
-- just the image.
|
||||
return dgr_opt.caption and
|
||||
pandoc.Figure(
|
||||
pandoc.Plain{image},
|
||||
dgr_opt.caption,
|
||||
dgr_opt['fig-attr']
|
||||
) or
|
||||
pandoc.Plain{image}
|
||||
end
|
||||
end
|
||||
|
||||
return setmetatable(
|
||||
{{
|
||||
Pandoc = function (doc)
|
||||
local conf = configure(doc.meta, FORMAT)
|
||||
return doc:walk {
|
||||
CodeBlock = code_to_figure(conf),
|
||||
}
|
||||
end
|
||||
}},
|
||||
{
|
||||
version = version,
|
||||
}
|
||||
)
|
||||
127
converters/include-files.lua
Normal file
@@ -0,0 +1,127 @@
|
||||
--- include-files.lua – filter to include Markdown files
|
||||
---
|
||||
--- Copyright: © 2019–2021 Albert Krewinkel
|
||||
--- License: MIT – see LICENSE file for details
|
||||
|
||||
-- Module pandoc.path is required and was added in version 2.12
|
||||
PANDOC_VERSION:must_be_at_least '2.12'
|
||||
|
||||
local List = require 'pandoc.List'
|
||||
local path = require 'pandoc.path'
|
||||
local system = require 'pandoc.system'
|
||||
|
||||
--- Get include auto mode
|
||||
local include_auto = false
|
||||
function get_vars (meta)
|
||||
if meta['include-auto'] then
|
||||
include_auto = true
|
||||
end
|
||||
end
|
||||
|
||||
--- Keep last heading level found
|
||||
local last_heading_level = 0
|
||||
function update_last_level(header)
|
||||
last_heading_level = header.level
|
||||
end
|
||||
|
||||
--- Update contents of included file
|
||||
local function update_contents(blocks, shift_by, include_path)
|
||||
local update_contents_filter = {
|
||||
-- Shift headings in block list by given number
|
||||
Header = function (header)
|
||||
if shift_by then
|
||||
header.level = header.level + shift_by
|
||||
end
|
||||
return header
|
||||
end,
|
||||
-- If link paths are relative then prepend include file path
|
||||
Link = function (link)
|
||||
if path.is_relative(link.target) and string.sub(path.filename(link.target), 1, 1) ~= '#' then
|
||||
link.target = path.normalize(path.join({include_path, link.target}))
|
||||
end
|
||||
return link
|
||||
end,
|
||||
-- If image paths are relative then prepend include file path
|
||||
Image = function (image)
|
||||
if path.is_relative(image.src) then
|
||||
image.src = path.normalize(path.join({include_path, image.src}))
|
||||
end
|
||||
return image
|
||||
end,
|
||||
-- Update path for include-code-files.lua filter style CodeBlocks
|
||||
CodeBlock = function (cb)
|
||||
if cb.attributes.include and path.is_relative(cb.attributes.include) then
|
||||
cb.attributes.include =
|
||||
path.normalize(path.join({include_path, cb.attributes.include}))
|
||||
end
|
||||
return cb
|
||||
end
|
||||
}
|
||||
|
||||
return pandoc.walk_block(pandoc.Div(blocks), update_contents_filter).content
|
||||
end
|
||||
|
||||
--- Filter function for code blocks
|
||||
local transclude
|
||||
function transclude (cb)
|
||||
-- ignore code blocks which are not of class "include".
|
||||
if not cb.classes:includes 'include' then
|
||||
return
|
||||
end
|
||||
|
||||
-- Markdown is used if this is nil.
|
||||
local format = cb.attributes['format']
|
||||
|
||||
-- Attributes shift headings
|
||||
local shift_heading_level_by = 0
|
||||
local shift_input = cb.attributes['shift-heading-level-by']
|
||||
if shift_input then
|
||||
shift_heading_level_by = tonumber(shift_input)
|
||||
else
|
||||
if include_auto then
|
||||
-- Auto shift headings
|
||||
shift_heading_level_by = last_heading_level
|
||||
end
|
||||
end
|
||||
|
||||
--- keep track of level before recusion
|
||||
local buffer_last_heading_level = last_heading_level
|
||||
|
||||
local blocks = List:new()
|
||||
for line in cb.text:gmatch('[^\n]+') do
|
||||
if line:sub(1,2) ~= '//' then
|
||||
local fh = io.open(line)
|
||||
if not fh then
|
||||
io.stderr:write("Cannot open file " .. line .. " | Skipping includes\n")
|
||||
else
|
||||
-- read file as the given format with global reader options
|
||||
local contents = pandoc.read(
|
||||
fh:read '*a',
|
||||
format,
|
||||
PANDOC_READER_OPTIONS
|
||||
).blocks
|
||||
last_heading_level = 0
|
||||
-- recursive transclusion
|
||||
contents = system.with_working_directory(
|
||||
path.directory(line),
|
||||
function ()
|
||||
return pandoc.walk_block(
|
||||
pandoc.Div(contents),
|
||||
{ Header = update_last_level, CodeBlock = transclude }
|
||||
)
|
||||
end).content
|
||||
--- reset to level before recursion
|
||||
last_heading_level = buffer_last_heading_level
|
||||
blocks:extend(update_contents(contents, shift_heading_level_by,
|
||||
path.directory(line)))
|
||||
fh:close()
|
||||
end
|
||||
end
|
||||
end
|
||||
return blocks
|
||||
end
|
||||
|
||||
return {
|
||||
{ Meta = get_vars },
|
||||
{ Header = update_last_level, CodeBlock = transclude }
|
||||
}
|
||||
@@ -7,21 +7,67 @@ TEMP_MD_FILE="$BUILD_DIR/$(basename "$MD_FILE")"
|
||||
TEMP_TEX_FILE="$BUILD_DIR/$(basename "$MD_FILE" | sed -e 's|md$|latex|')"
|
||||
mkdir -p "$(dirname "$TEMP_MD_FILE")"
|
||||
|
||||
title="$(grep '^# ' "$MD_FILE" | sed 's|^# ||')"
|
||||
cp "$MD_FILE" "$TEMP_MD_FILE"
|
||||
|
||||
cat "$MD_FILE" | sed \
|
||||
function download_images() {
|
||||
echo "download images for $1"
|
||||
for line in $(grep '!\[.*\](https://.*\.png)' "$1" | sed -e 's/ /%20;/g')
|
||||
do
|
||||
src=$(echo "$line" | sed -e 's/^.*(//' -e 's/).*$//' -e 's/%20;/ /g')
|
||||
echo "remote image found: $src"
|
||||
|
||||
mkdir -p "${BASE_DIR}/latex/images"
|
||||
name=$(echo "$src" | sed -e 's|^.*/\([^/]*\)$|\1|')
|
||||
curl "$src" > "${BASE_DIR}/latex/images/$name"
|
||||
done
|
||||
echo "download done"
|
||||
}
|
||||
|
||||
for line in $(grep '^!\[.*\](.*\.md)$' "$TEMP_MD_FILE" | sed -e 's/ /%20;/g')
|
||||
do
|
||||
src=$(echo "$line" | sed -e 's/^.*(//' -e 's/).*$//' -e 's/%20;/ /g')
|
||||
echo "include found: markdown/$src"
|
||||
|
||||
cp "markdown/$src" "$BUILD_DIR/$src"
|
||||
sed -i "$BUILD_DIR/$src" \
|
||||
-e 's|\[toc\]||' \
|
||||
-e 's|^\[parent\].*$||' \
|
||||
-e 's|^# |\\newpage\n# |' \
|
||||
-e 's|^## |\\newpage\n## |' \
|
||||
-e 's|\[\([^]]*\)\](#\([^)]*\))|[\1](#\L\2)|' \
|
||||
-e 's|https://live.kladjes.nl/uploads|../../latex/images|'
|
||||
download_images "$BUILD_DIR/$src"
|
||||
|
||||
sed -i "$TEMP_MD_FILE" \
|
||||
-e "s/^\!\[.*\]($src)\$/\`\`\`\\{.include shift-heading-level-by=1\\}\n${src}\n\`\`\`/"
|
||||
|
||||
done
|
||||
|
||||
download_images "$TEMP_MD_FILE"
|
||||
|
||||
title="$(grep '^# ' "$MD_FILE" | head -n 1 | sed 's|^# ||')"
|
||||
|
||||
sed -i "$TEMP_MD_FILE" \
|
||||
-e 's|\[toc\]|\\tableofcontents|' \
|
||||
-e 's|^\[parent\].*$||' \
|
||||
-e 's|^# .*$||' \
|
||||
-e 's|^#||' \
|
||||
-e 's|^# |\\newpage\n# |' \
|
||||
-e 's|\[\([^]]*\)\](#\([^)]*\))|[\1](#\L\2)|' \
|
||||
>"$TEMP_MD_FILE"
|
||||
-e 's|https://live.kladjes.nl/uploads|../../latex/images|'
|
||||
|
||||
cd "$BUILD_DIR"
|
||||
pandoc --to=latex --template "${BASE_DIR}/converters/template.latex" -o "$TEX_FILE" "$(basename "$TEMP_MD_FILE")"
|
||||
pandoc --lua-filter=../../converters/include-files.lua --to=latex --from=markdown+abbreviations --template "${BASE_DIR}/converters/template.latex" -o "$TEX_FILE" "$(basename "$TEMP_MD_FILE")"
|
||||
cd "$BASE_DIR"
|
||||
|
||||
# for line in $(grep '^!\[.*\](.*\.md)$' "$TEMP_MD_FILE" | sed 's/ /%20;/g')
|
||||
# do
|
||||
# src=$(echo "$line" | sed -e 's/^.*(//' -e 's/).*$//' -e 's/%20;/ /g')
|
||||
|
||||
# sed -i "$TEMP_MD_FILE" \
|
||||
# -e "s/^!\[.*\]($src)\$/\\include{$src}/"
|
||||
# done
|
||||
|
||||
sed --in-place \
|
||||
-e "s|?title?|$title|" \
|
||||
"$TEX_FILE"
|
||||
|
||||
@@ -79,9 +79,10 @@
|
||||
\lineskip .75em
|
||||
\begin{tabular}{r l}
|
||||
gemaakt door: & Finley van Reenen (0964590@hr.nl) \\
|
||||
& Gryvon Belfor (0985890@hr.nl) \\
|
||||
& Chris Tan (0992143@hr.nl) \\
|
||||
& Mohamed El Morabiti (1014780@hr.nl) \\\\
|
||||
& Tijn Snijders (1001829@hr.nl) \\
|
||||
& Max Kappert (1030682@hr.nl) \\
|
||||
& Thomas Braam (0989527@hr.nl) \\\\
|
||||
vak code: & ELEPEE51 \\\\
|
||||
ge\"exporteerd op: & \today
|
||||
\end{tabular}
|
||||
@@ -94,7 +95,7 @@
|
||||
\fancyhead[LO]{\color{gray}\fontUbuntu ?title?}
|
||||
\fancyhead[RO]{\color{gray}\fontUbuntu Superlight Personal Carrier}
|
||||
\fancyfoot{} % clear all footer fields
|
||||
\fancyfoot[LO]{\color{gray}\fontUbuntu E.L.F. van Reenen, G. Belfor, C. Tan en M.E. Morabiti}
|
||||
\fancyfoot[LO]{\color{gray}\fontUbuntu E.L.F. van Reenen, C. Tan, T Snijders, M. Kappert en T. Braam}
|
||||
\fancyfoot[CO]{\color{gray}\fontUbuntu }
|
||||
\fancyfoot[RO]{\color{gray}\fontUbuntu \thepage}
|
||||
|
||||
|
||||
801
latex/detailontwerp_stabilisatie.latex
Normal file
@@ -0,0 +1,801 @@
|
||||
\documentclass[11pt]{article}
|
||||
\usepackage[a4paper, portrait, includehead, includefoot, margin=1.5cm]{geometry}
|
||||
|
||||
\usepackage[dutch]{babel}
|
||||
|
||||
\usepackage{pdfpages}
|
||||
|
||||
\usepackage{xcolor}
|
||||
\usepackage{makecell}
|
||||
\usepackage{tabularx}
|
||||
\usepackage{adjustbox}
|
||||
|
||||
\usepackage{framed}
|
||||
|
||||
\usepackage{longtable}
|
||||
\providecommand{\tightlist}{\setlength{\itemsep}{0pt}\setlength{\parskip}{0pt}}
|
||||
\usepackage{booktabs}
|
||||
|
||||
\usepackage{fontspec}
|
||||
\usepackage{xunicode}
|
||||
\usepackage{xltxtra}
|
||||
|
||||
\newfontfamily\fontRoboto[]{Roboto}
|
||||
\newfontfamily\fontUbuntu[]{Ubuntu}
|
||||
\setmainfont{Roboto}
|
||||
|
||||
% \usepackage[style=ieee]{biblatex}
|
||||
% \usepackage{csquotes}
|
||||
% \addbibresource{bibliography.bib}
|
||||
|
||||
% header and footer
|
||||
\usepackage{fancyhdr}
|
||||
\renewcommand{\headrule}{}
|
||||
|
||||
\usepackage[nodayofweek]{datetime}
|
||||
|
||||
\definecolor{darkishyellow}{rgb}{177, 179, 173}
|
||||
|
||||
% for images
|
||||
\usepackage{graphbox}
|
||||
|
||||
% add bookmarks with \hypertarget
|
||||
\usepackage{bookmark}
|
||||
\usepackage{hyperref}
|
||||
|
||||
% heading numberging
|
||||
\setcounter{secnumdepth}{3}
|
||||
\renewcommand\thesection{{\fontUbuntu\arabic{section}}}
|
||||
\renewcommand\thesubsection{{\fontUbuntu\arabic{section}.\arabic{subsection}}}
|
||||
\renewcommand\thesubsubsection{{\fontUbuntu\arabic{section}.\arabic{subsection}.\arabic{subsubsection}}}
|
||||
\usepackage{sectsty}
|
||||
\allsectionsfont{\fontUbuntu}
|
||||
\setlength{\headheight}{14pt}
|
||||
|
||||
% no indent at paragraphs
|
||||
\usepackage{parskip}
|
||||
\usepackage{setspace}
|
||||
\setstretch{1.1}
|
||||
\let\tmpitem\itemize
|
||||
\let\tmpenditem\enditemize
|
||||
\renewenvironment{itemize}{\tmpitem\setlength\itemsep{-.4em}}{\tmpenditem}
|
||||
|
||||
\begin{document}
|
||||
\raggedright
|
||||
\pagecolor{darkishyellow}
|
||||
|
||||
\begin{titlepage}
|
||||
\null\vfill
|
||||
\begin{center}
|
||||
{\Huge\fontUbuntu Detailontwerp Stabilisatie \par}
|
||||
\vskip 3em
|
||||
% \includegraphics{assets/eriks.50.png}
|
||||
\vskip 3em
|
||||
{\huge\fontUbuntu Superlight Personal Carrier \par}
|
||||
\end{center}
|
||||
\vskip 25em
|
||||
{
|
||||
\large
|
||||
\lineskip .75em
|
||||
\begin{tabular}{r l}
|
||||
gemaakt door: & Finley van Reenen (0964590@hr.nl) \\
|
||||
& Chris Tan (0992143@hr.nl) \\
|
||||
& Tijn Snijders (1001829@hr.nl) \\
|
||||
& Max Kappert (1030682@hr.nl) \\
|
||||
& Thomas Braam (0989527@hr.nl) \\\\
|
||||
vak code: & ELEPEE51 \\\\
|
||||
ge\"exporteerd op: & \today
|
||||
\end{tabular}
|
||||
}
|
||||
\vfill\null
|
||||
\end{titlepage}
|
||||
|
||||
\pagestyle{fancy}
|
||||
\fancyhead{} % clear all header fields
|
||||
\fancyhead[LO]{\color{gray}\fontUbuntu Detailontwerp Stabilisatie}
|
||||
\fancyhead[RO]{\color{gray}\fontUbuntu Superlight Personal Carrier}
|
||||
\fancyfoot{} % clear all footer fields
|
||||
\fancyfoot[LO]{\color{gray}\fontUbuntu E.L.F. van Reenen, C. Tan, T Snijders, M. Kappert en T. Braam}
|
||||
\fancyfoot[CO]{\color{gray}\fontUbuntu }
|
||||
\fancyfoot[RO]{\color{gray}\fontUbuntu \thepage}
|
||||
|
||||
|
||||
|
||||
|
||||
\tableofcontents
|
||||
|
||||
\newpage
|
||||
|
||||
\section{Inleiding}\label{inleiding}
|
||||
|
||||
De SPC\footnote{Superlight Personal Carrier} is een twee wielig concept
|
||||
eenpersoons voertuig. Zonder actieve stabilisatie gaat deze omvallen,
|
||||
hiervoor is een reactie wiel ontworpen. Het aansturen van de motor voor
|
||||
dit wiel is lastig, de volledige kracht moet gehaald worden vanaf
|
||||
stilstand. Dit is alleen mogelijk met FOC\footnote{Field oriented
|
||||
Controll}. Er zijn niet veel motor driver op de markt voor het
|
||||
vermogen (4,5 KW, 45 Nm), hierom is er een op maat gemaakte motor driver
|
||||
ontworpen.
|
||||
|
||||
\newpage
|
||||
|
||||
\section{Analyse}\label{analyse}
|
||||
|
||||
Tijn Stijders (student Automotive engineer) heeft de benodigde kracht
|
||||
van \(45 Nm\) op een maximumsnelheid van \(1000 rpm\), dit is \(4.5 kW\)
|
||||
berekent voor dit voertuig. Deze berekening is gebaseerd op
|
||||
inschattingen van het gewicht van het voertuig, maar is nauwkeurig
|
||||
genoeg om te gebruiken.
|
||||
|
||||
\subsection{Motor Keuze}\label{motor-keuze}
|
||||
|
||||
Het is voor ons niet toegestaan om boven de \(50 V\) te testen op de RDM
|
||||
wegens veiligheid. Er zijn erg weinig motoren beschikbaar die onder deze
|
||||
spanning aan de eisen voldoet. Hierom wordt er niet op volledig vermogen
|
||||
getest in dit project, om meer keuze vrijheid te krijgen voor een
|
||||
geschikte motor.
|
||||
|
||||
De volgende motor is gekozen:
|
||||
|
||||
\href{https://nl.aliexpress.com/item/1005006301690150.html?spm=a2g0o.productlist.main.2.6673ifiZifiZQm&algo_pvid=d6292651-bb7c-46b1-a220-6690a13ff967&algo_exp_id=d6292651-bb7c-46b1-a220-6690a13ff967-1&pdp_ext_f=\%7B\%22order\%22\%3A\%2214\%22\%2C\%22eval\%22\%3A\%221\%22\%7D&pdp_npi=4\%40dis\%21EUR\%21168.69\%21168.69\%21\%21\%211350.60\%211350.60\%21\%402103847817496360886601361e6a7e\%2112000036679171853\%21sea\%21NL\%210\%21ABX&curPageLogUid=wQDO26xezkrq&utparam-url=scene\%3Asearch\%7Cquery_from\%3A}{referentie
|
||||
BLDC-motor}
|
||||
|
||||
De gegeven specificatie zijn:
|
||||
|
||||
\begin{longtable}[]{@{}ll@{}}
|
||||
\toprule\noalign{}
|
||||
\endhead
|
||||
\bottomrule\noalign{}
|
||||
\endlastfoot
|
||||
maximale spanning & 60V \\
|
||||
nominaal vermogen & 3000 W \\
|
||||
maximaal vermogen & 6000w \\
|
||||
piek vermogen & 7000w-8000W \\
|
||||
onbelaste snelheid & 3500 rpm \\
|
||||
maximaal rendement & 90\% \\
|
||||
maximaal koppel & 10 Nm \\
|
||||
piekkoppel & 30 Nm \\
|
||||
nettogewicht & 4,5 kg \\
|
||||
max. stroombegrenzing & 150A \\
|
||||
\end{longtable}
|
||||
|
||||
\begin{figure}
|
||||
\centering
|
||||
\includegraphics{../../latex/images/f2dbe830-87ac-4a88-95da-f53177a114a1.png}
|
||||
\caption{grafiek test data van de motor}
|
||||
\end{figure}
|
||||
|
||||
\begin{longtable}[]{@{}
|
||||
>{\raggedright\arraybackslash}p{(\columnwidth - 16\tabcolsep) * \real{0.1754}}
|
||||
>{\raggedright\arraybackslash}p{(\columnwidth - 16\tabcolsep) * \real{0.1228}}
|
||||
>{\raggedright\arraybackslash}p{(\columnwidth - 16\tabcolsep) * \real{0.1228}}
|
||||
>{\raggedright\arraybackslash}p{(\columnwidth - 16\tabcolsep) * \real{0.1228}}
|
||||
>{\raggedright\arraybackslash}p{(\columnwidth - 16\tabcolsep) * \real{0.1053}}
|
||||
>{\raggedright\arraybackslash}p{(\columnwidth - 16\tabcolsep) * \real{0.0877}}
|
||||
>{\raggedright\arraybackslash}p{(\columnwidth - 16\tabcolsep) * \real{0.1228}}
|
||||
>{\raggedright\arraybackslash}p{(\columnwidth - 16\tabcolsep) * \real{0.0877}}
|
||||
>{\raggedright\arraybackslash}p{(\columnwidth - 16\tabcolsep) * \real{0.0526}}@{}}
|
||||
\toprule\noalign{}
|
||||
\begin{minipage}[b]{\linewidth}\raggedright
|
||||
\end{minipage} & \begin{minipage}[b]{\linewidth}\raggedright
|
||||
\(U\) (V)
|
||||
\end{minipage} & \begin{minipage}[b]{\linewidth}\raggedright
|
||||
\(I\) (A)
|
||||
\end{minipage} & \begin{minipage}[b]{\linewidth}\raggedright
|
||||
\(P_{in}\) (W)
|
||||
\end{minipage} & \begin{minipage}[b]{\linewidth}\raggedright
|
||||
rpm
|
||||
\end{minipage} & \begin{minipage}[b]{\linewidth}\raggedright
|
||||
koppel (N.m)
|
||||
\end{minipage} & \begin{minipage}[b]{\linewidth}\raggedright
|
||||
\(P_{out}\) (W)
|
||||
\end{minipage} & \begin{minipage}[b]{\linewidth}\raggedright
|
||||
efficiëntie (\%)
|
||||
\end{minipage} & \begin{minipage}[b]{\linewidth}\raggedright
|
||||
tijd (s)
|
||||
\end{minipage} \\
|
||||
\midrule\noalign{}
|
||||
\endhead
|
||||
\bottomrule\noalign{}
|
||||
\endlastfoot
|
||||
onbelast & 47.49 & 3.666 & 174.1 & 3264 & 0.03 & 11.1 & 6.4 & 1 \\
|
||||
test eindpunt\footnote{of wat er ook bedoeld wordt met ``测试结束点''} &
|
||||
42.99 & 60.35 & 2594 & 2294 & 8.77 & 2108 & 81.3 & 71 \\
|
||||
beoordeelde punten\footnote{of wat er ook bedoeld wordt met ``額定点''}
|
||||
& 44.03 & 47.71 & 2101 & 2471 & 6.82 & 1800 & 84.1 & 62 \\
|
||||
max. koppel & 42.99 & 60.35 & 2594 & 2294 & 8.77 & 2108 & 81.3 & 71 \\
|
||||
max. \(P_{out}\) & 42.99 & 60.35 & 2594 & 2294 & 8.77 & 2108 & 81.3 &
|
||||
71 \\
|
||||
max. efficiëntie & 44.72 & 38.53 & 1723 & 2605 & 5.41 & 1476 & 85.7 &
|
||||
55 \\
|
||||
\end{longtable}
|
||||
|
||||
\begin{longtable}[]{@{}
|
||||
>{\raggedright\arraybackslash}p{(\columnwidth - 16\tabcolsep) * \real{0.0741}}
|
||||
>{\raggedright\arraybackslash}p{(\columnwidth - 16\tabcolsep) * \real{0.1296}}
|
||||
>{\raggedright\arraybackslash}p{(\columnwidth - 16\tabcolsep) * \real{0.1296}}
|
||||
>{\raggedright\arraybackslash}p{(\columnwidth - 16\tabcolsep) * \real{0.1296}}
|
||||
>{\raggedright\arraybackslash}p{(\columnwidth - 16\tabcolsep) * \real{0.1111}}
|
||||
>{\raggedright\arraybackslash}p{(\columnwidth - 16\tabcolsep) * \real{0.1111}}
|
||||
>{\raggedright\arraybackslash}p{(\columnwidth - 16\tabcolsep) * \real{0.1296}}
|
||||
>{\raggedright\arraybackslash}p{(\columnwidth - 16\tabcolsep) * \real{0.1111}}
|
||||
>{\raggedright\arraybackslash}p{(\columnwidth - 16\tabcolsep) * \real{0.0741}}@{}}
|
||||
\toprule\noalign{}
|
||||
\begin{minipage}[b]{\linewidth}\raggedright
|
||||
编号(No.~)
|
||||
\end{minipage} & \begin{minipage}[b]{\linewidth}\raggedright
|
||||
电压 (V)
|
||||
\end{minipage} & \begin{minipage}[b]{\linewidth}\raggedright
|
||||
电流 (A)
|
||||
\end{minipage} & \begin{minipage}[b]{\linewidth}\raggedright
|
||||
输入功率 (W)
|
||||
\end{minipage} & \begin{minipage}[b]{\linewidth}\raggedright
|
||||
转速 (rpm)
|
||||
\end{minipage} & \begin{minipage}[b]{\linewidth}\raggedright
|
||||
转矩 (Nm)
|
||||
\end{minipage} & \begin{minipage}[b]{\linewidth}\raggedright
|
||||
输出功率 (W)
|
||||
\end{minipage} & \begin{minipage}[b]{\linewidth}\raggedright
|
||||
效率 (\%)
|
||||
\end{minipage} & \begin{minipage}[b]{\linewidth}\raggedright
|
||||
时间 (s)
|
||||
\end{minipage} \\
|
||||
\midrule\noalign{}
|
||||
\endhead
|
||||
\bottomrule\noalign{}
|
||||
\endlastfoot
|
||||
1 & 47.49 & 3.666 & 174.1 & 3264 & 0.03 & 11.1 & 6.4 & 1 \\
|
||||
2 & 47.5 & 3.635 & 172.6 & 3262 & 0.03 & 11.14 & 6.5 & 4 \\
|
||||
3 & 47.5 & 3.684 & 175 & 3259 & 0.03 & 11.44 & 6.5 & 7 \\
|
||||
4 & 47.48 & 3.846 & 182.6 & 3256 & 0.05 & 18.52 & 10.1 & 10 \\
|
||||
5 & 47.44 & 4.244 & 201.3 & 3246 & 0.12 & 42.5 & 21.1 & 13 \\
|
||||
6 & 47.39 & 5.001 & 237 & 3233 & 0.23 & 79.21 & 33.4 & 16 \\
|
||||
7 & 47.31 & 5.93 & 280.5 & 3214 & 0.37 & 126.7 & 45.2 & 19 \\
|
||||
8 & 47.21 & 7.09 & 334.7 & 3186 & 0.55 & 184.5 & 55.1 & 22 \\
|
||||
9 & 47.1 & 8.719 & 410.7 & 3154 & 0.77 & 254.5 & 62.0 & 25 \\
|
||||
10 & 46.95 & 10.76 & 505.3 & 3114 & 1.04 & 341.9 & 67.7 & 28 \\
|
||||
11 & 46.78 & 13.04 & 610.3 & 3076 & 1.35 & 437.9 & 71.8 & 31 \\
|
||||
12 & 46.6 & 15.34 & 715 & 3040 & 1.71 & 547.4 & 76.6 & 34 \\
|
||||
13 & 46.38 & 17.9 & 830.3 & 2980 & 2.12 & 662.2 & 79.8 & 37 \\
|
||||
14 & 46.14 & 20.68 & 954.7 & 2917 & 2.57 & 786.9 & 82.4 & 40 \\
|
||||
15 & 45.88 & 23.75 & 1090 & 2859 & 3.08 & 922.6 & 84.6 & 43 \\
|
||||
16 & 45.61 & 27.55 & 1256 & 2801 & 3.6 & 1057 & 84.2 & 46 \\
|
||||
17 & 45.32 & 31.6 & 1432 & 2750 & 4.16 & 1198 & 83.7 & 49 \\
|
||||
18 & 45.04 & 34.65 & 1561 & 2676 & 4.75 & 1331 & 85.3 & 52 \\
|
||||
19 & 44.72 & 38.53 & 1723 & 2605 & 5.41 & 1476 & 85.7 & 55 \\
|
||||
20 & 44.38 & 43.17 & 1916 & 2539 & 6.08 & 1617 & 84.4 & 58 \\
|
||||
21 & 44.03 & 47.71 & 2101 & 2471 & 6.82 & 1800 & 84.1 & 62 \\
|
||||
22 & 43.67 & 52.13 & 2277 & 2415 & 7.48 & 1892 & 83.1 & 65 \\
|
||||
23 & 43.33 & 56.41 & 2444 & 2357 & 8.13 & 2006 & 82.1 & 68 \\
|
||||
24 & 42.99 & 60.35 & 2594 & 2294 & 8.77 & 2108 & 81.3 & 71 \\
|
||||
\end{longtable}
|
||||
|
||||
Er missen wat gegevens om verder te kunnen. De hoeveelheid stroom bij
|
||||
krachten groter dan \(8.77 Nm\) en hoelang de piek kracht volgehouden
|
||||
kan worden.
|
||||
|
||||
\subsection{koppel constante}\label{koppel-constante}
|
||||
|
||||
Om de stroom bij grotere krachten te berekenen is de koppel constante
|
||||
nodig. Dit is de hoeveelheid koppel die per Ampère levert. In dit geval
|
||||
kan deze berekend worden met de volgende formule.
|
||||
|
||||
\[
|
||||
K_T = \frac{\tau}{I-I_{noload}}
|
||||
\]
|
||||
|
||||
\(K_T\): koppel constante in Nm/A\\
|
||||
\(\tau\): koppel in Nm\\
|
||||
\(I\): de stroom nodig om de koppel te halen\\
|
||||
\(I_{noload}\): de stroom die verbruikt wordt als de motor vrij draait
|
||||
|
||||
\(\tau\) en \(I\) is gegeven in de test data. De beste inschatting voor
|
||||
\(I_{noload}\) is het gemiddelde van test 1, 2 en 3. Deze hebben
|
||||
allemaal \(0.03Nm\) koppel, er is geen informatie hoe deze koppel
|
||||
gemeten is. Om te controleren of dit correct is is een plot gemaakt voor
|
||||
elke regel van de test data.
|
||||
|
||||
\begin{figure}
|
||||
\centering
|
||||
\includegraphics{../../latex/images/4aa438b9-f968-4ed9-97f3-dfb934130f6d.png}
|
||||
\caption{Plot van koppel constanten met 3.662 A voor I\_noload}
|
||||
\end{figure}
|
||||
|
||||
x as: test nummer\\
|
||||
y as: koppel constante\\
|
||||
blauwe punten: berekende koppel constante vanuit de test data\\
|
||||
oranje lijn: regressie van de berekende koppel constante
|
||||
|
||||
In deze grafiek is een duidelijke curve te zien aan het begin te zien.
|
||||
Dit duidt er op dat \(I_{noload}\) te hoog is. Dit kan verklaard worden
|
||||
als de meting is uitgevoerd wanneer de tegenmotor nog aangesloten was
|
||||
maar uitgeschakeld. De \(0.03 Nm\) komt, als deze theorie correct is,
|
||||
waarschijnlijk van de lagers van de tegenmotor. Waarschijnlijk mist ook
|
||||
de weerstand van de lagers in de motor zelf.
|
||||
|
||||
Met \(3.52 A\) voor \(I_{noload}\) ziet de grafiek er als volgt uit.
|
||||
|
||||
\begin{figure}
|
||||
\centering
|
||||
\includegraphics{../../latex/images/fcc86ab9-d051-411d-8379-9d4223c5f4a4.png}
|
||||
\caption{Plot van koppel constanten met 3.52 A voor I\_noload}
|
||||
\end{figure}
|
||||
|
||||
Dit is waarschijnlijk dichter bij de werkelijke \(I_{noload}\). Het is
|
||||
hier ook te zien dat de koppel constante ongeveer \(0.15 Nm/A\) is.
|
||||
|
||||
\subsection{Snelheidsconstante en Weerstand
|
||||
Stator}\label{snelheidsconstante-en-weerstand-stator}
|
||||
|
||||
De snelheidsconstante is het aantal rpm dat de motor draait zonder
|
||||
belasting per volt. Deze kan berekend worden met de volgende formule.
|
||||
|
||||
\[
|
||||
K_v = \frac{\omega}{U-U_{th}}
|
||||
\]
|
||||
|
||||
\(K_v\): de snelheidsconstante in rpm/v\\
|
||||
\(\omega\): de snelheid dat de motor draait in rpm\\
|
||||
\(U\): de spanning\\
|
||||
\(U_{th}\): de spanning waarop de motor start met draaien
|
||||
|
||||
Onbelast draait met \(47.49V\) (\(U\)) draait de motor 3264 rpm
|
||||
(\(\omega\)). \(U_{th}\) is niet gegeven, met de gegeven die er wel zijn
|
||||
is de beste methode met de volgende formules.
|
||||
|
||||
\[
|
||||
U=\frac{\omega}{K_v} + \frac{\tau}{K_T} R + U_{th}
|
||||
\]
|
||||
|
||||
\[
|
||||
I=\frac{\omega}{K_vR} + \frac{\tau}{K_T} + I_{noload}
|
||||
\]
|
||||
|
||||
\(U\): de motor spanning\\
|
||||
\(\omega\): de snelheid dat de motor draait in rpm\\
|
||||
\(K_v\): de snelheidsconstante in rpm/v\\
|
||||
\(\tau\): koppel in Nm\\
|
||||
\(K_T\): koppel constante in Nm/A\\
|
||||
\(R\): de weerstand van de stator\\
|
||||
\(U_{th}\): de spanning waarop de motor start met draaien\\
|
||||
\(I\): de stroom nodig om de koppel te halen\\
|
||||
\(I_{noload}\): de stroom die verbruikt wordt als de motor vrij draait
|
||||
|
||||
Als \(\omega = 0\) gelt \(U = \frac{\tau}{K_T} R + U_{th}\) en
|
||||
\(I = \frac{\tau}{K_T} + I_{noload} \Rightarrow IR = U = \frac{\tau}{K_T} R + I_{noload} R\)
|
||||
dus \(U_{th} = R I_{noload}\)
|
||||
|
||||
Hiermee kan de volgende formule opgesteld worden
|
||||
|
||||
\[
|
||||
U = \frac{\omega}{K_v} + \frac{\tau}{K_T} R + R I_{noload}
|
||||
\]
|
||||
|
||||
\[
|
||||
\Rightarrow RU=R\frac{\omega}{K_v} + R^2(\frac{\tau}{K_T} + I_{noload})
|
||||
\]
|
||||
|
||||
\[
|
||||
\Rightarrow \sqrt{\frac{U}{\frac{\omega}{K_v} (\frac{\tau}{K_T} + I_{noload})}} = R
|
||||
\]
|
||||
|
||||
Met de methode gebruikt voor het berekenen van \(I_{noload}\) komen we
|
||||
op de waardes \(K_v = 69rpm/V\), \(R = 170m\Omega\) en
|
||||
\(U_{th} = 598mV\). Hieronder is de grafiek van alle spannignserrors met
|
||||
deze waardes
|
||||
|
||||
\begin{figure}
|
||||
\centering
|
||||
\includegraphics{../../latex/images/99a21b34-2ff8-475c-8fef-296368d93bae.png}
|
||||
\caption{Grafiek van spanningserror met berekende waarde}
|
||||
\end{figure}
|
||||
|
||||
x as: test nummer\\
|
||||
y as: spannigs error tussen test data en
|
||||
\(U=\frac{\omega}{K_v} + \frac{\tau}{K_T} R + U_{th}\)
|
||||
|
||||
\subsection{Koppel Tijdens het
|
||||
Draaien}\label{koppel-tijdens-het-draaien}
|
||||
|
||||
Om de koppel van \(45 Nm\) te kunnen halen op \(1000 rpm\) is een
|
||||
gearbox nodig. We hebben alles al berekend om de direct de benodigde
|
||||
spanning en stroom te krijgen van koppel en snelheid met de volgende
|
||||
formule.
|
||||
|
||||
\[
|
||||
U = \frac{\omega}{K_v} + \frac{\tau}{K_T} R + U_{th} = \frac{\omega}{69} + \frac{\tau}{0.15} \cdot 0.17 + 0.598
|
||||
\]
|
||||
|
||||
\[
|
||||
I = \frac{\tau}{K_T} + I_{noload} = \frac{\tau}{0.15} + 3.52
|
||||
\]
|
||||
|
||||
\begin{longtable}[]{@{}
|
||||
>{\raggedright\arraybackslash}p{(\columnwidth - 12\tabcolsep) * \real{0.1228}}
|
||||
>{\raggedleft\arraybackslash}p{(\columnwidth - 12\tabcolsep) * \real{0.1579}}
|
||||
>{\raggedleft\arraybackslash}p{(\columnwidth - 12\tabcolsep) * \real{0.1404}}
|
||||
>{\raggedleft\arraybackslash}p{(\columnwidth - 12\tabcolsep) * \real{0.1579}}
|
||||
>{\raggedleft\arraybackslash}p{(\columnwidth - 12\tabcolsep) * \real{0.1404}}
|
||||
>{\raggedleft\arraybackslash}p{(\columnwidth - 12\tabcolsep) * \real{0.1579}}
|
||||
>{\raggedleft\arraybackslash}p{(\columnwidth - 12\tabcolsep) * \real{0.1228}}@{}}
|
||||
\toprule\noalign{}
|
||||
\begin{minipage}[b]{\linewidth}\raggedright
|
||||
gearbox
|
||||
\end{minipage} & \begin{minipage}[b]{\linewidth}\raggedleft
|
||||
snelheid
|
||||
\end{minipage} & \begin{minipage}[b]{\linewidth}\raggedleft
|
||||
koppel
|
||||
\end{minipage} & \begin{minipage}[b]{\linewidth}\raggedleft
|
||||
spanning
|
||||
\end{minipage} & \begin{minipage}[b]{\linewidth}\raggedleft
|
||||
stroom
|
||||
\end{minipage} & \begin{minipage}[b]{\linewidth}\raggedleft
|
||||
vermogen
|
||||
\end{minipage} & \begin{minipage}[b]{\linewidth}\raggedleft
|
||||
efficiëntie\footnote{op basis van 4.5 kW mechanisch vermogen dat
|
||||
berekend is door automotive studenten}
|
||||
\end{minipage} \\
|
||||
\midrule\noalign{}
|
||||
\endhead
|
||||
\bottomrule\noalign{}
|
||||
\endlastfoot
|
||||
1:1 & 1000 rpm & 45.0 Nm & 66.1 V & 303.5 A & 20060 W & 22.4 \% \\
|
||||
1:2 & 2000 rpm & 22.5 Nm & 55.1 V & 153.5 A & 8456 W & 53.2 \% \\
|
||||
1:3 & 3000 rpm & 15.0 Nm & 61.1 V & 103.5 A & 6323 W & 71.2 \% \\
|
||||
1:4 & 4000 rpm & 11.3 Nm & 71.3 V & 78.5 A & 5600 W & 80.4 \% \\
|
||||
1:5 & 5000 rpm & 9.0 Nm & 83.3 V & 63.5 A & 5289 W & 85.1 \% \\
|
||||
\end{longtable}
|
||||
|
||||
Met een 1:4 gearbox kan een maximale snelheid van 875 rpm halen (de
|
||||
motor kan maximaal 3500 rpm draaien). Dit is iets onder de eisen, maar
|
||||
een betere motor hebben wij niet gevonden voor een redelijke prijs.
|
||||
|
||||
voor \(3500rpm\) met \(11.3 Nm\) is een spanning nodig van \(64V\).
|
||||
|
||||
\begin{quote}
|
||||
Er is zat een grote fout in eerdere berekeningen. Terug regekent was dat
|
||||
voor 25 Nm i.p.v. 45 Nm. Dan is er maar ongeveer 45 A met de 1:4 gearbox
|
||||
nodig. De motor driver is dus ontworpen voor 50 A (inclusief een marge)
|
||||
i.p.v. de 80 A die het eigenlijk had moeten zijn. Volgende keer de
|
||||
berekeningen beter controleren. Verder in dit document zal de \(50 A\)
|
||||
gebruik worden
|
||||
\end{quote}
|
||||
|
||||
\subsection{Specificaties}\label{specificaties}
|
||||
|
||||
\begin{itemize}
|
||||
\tightlist
|
||||
\item
|
||||
De drijver moet minimaal \(72 V\) aan kunnen, met voorkeur van
|
||||
\(120 V\) \footnote{Er wordt tot \(50 V\) getest, deze waardes word
|
||||
het voor ontworpen, maar niet tot de limiet getest.}
|
||||
\item
|
||||
de drijver moet minimaal \(50 A\) continu kunnen leveren (wat
|
||||
eigenlijk \(80 A\) had moeten zijn) \footnote{Er wordt tot \(50 V\)
|
||||
getest, deze waardes word het voor ontworpen, maar niet tot de
|
||||
limiet getest.}
|
||||
\item
|
||||
maakt gebruik van Field Orented Controll, om het volledige vermogen te
|
||||
kunnen halen vanaf stilstand.
|
||||
\item
|
||||
De hoek van het voertuig moet gemeten worden.
|
||||
\item
|
||||
Er is een regel loop tussen de hoek sensor en de kracht van de motor.
|
||||
\item
|
||||
Er is een SPI-client connector waarmee verschillende instellingen
|
||||
ingesteld mee kan worden, waaronder het maximaal vermogen.
|
||||
\end{itemize}
|
||||
|
||||
\newpage
|
||||
|
||||
\section{Ontwerp}\label{ontwerp}
|
||||
|
||||
\subsection{Componenten}\label{componenten}
|
||||
|
||||
\subsubsection{FET's}\label{fets}
|
||||
|
||||
MOSFET's was de eerste waar naar gezocht is. Van bijna alle FET's is de
|
||||
maximale stroom in de datasheet is niet realistisch haalbaar, dit
|
||||
vereist veel koeling dat erg lastig is te realiseren. Dit maakt het
|
||||
vinden van een geschikte MOSFET lastig, de meeste kunnen het niet aan
|
||||
alleen. Het is mogelijk om meerde parallel te zetten, maar dit vereist
|
||||
goede thermisch beheer.
|
||||
|
||||
Een andere optie is GaNFET's, hier hebben we een fabrikant (Efficiënt
|
||||
Power Converters; EPC) gevonden die veel redelijkere maximale stroom
|
||||
geven. De EPC3207\footnote{\url{https://epc-co.com/epc/products/gan-fets-and-ics/epc2307}}
|
||||
lijkt met meest geschikt voor dit project. Deze kan \(62A\) aan volgens
|
||||
de datasheet, en verliest ongeveer \(15W\) bij \(50A\). Dit vermogen is
|
||||
goed te koelen met een koelblok.
|
||||
|
||||
\subsubsection{Gate Driver}\label{gate-driver}
|
||||
|
||||
EPC geeft een lijst aan aangeraden gate drivers IC's\footnote{\url{https://epc-co.com/epc/design-support/gan-first-time-right/drivers-and-controllers}}.
|
||||
Er is gekozen voor de NCP51820 van On-Semi uit deze lijst. Deze kan hoge
|
||||
spanningen aan, de schakeling er om heen is makkelijk te maken door een
|
||||
aparte source en sync pinnen, en is goed verkrijgbaar voor een goede
|
||||
prijs.
|
||||
|
||||
\paragraph{Verliezen in de FET}\label{verliezen-in-de-fet}
|
||||
|
||||
De EPC2307 kan tot \(62A\) continu schakelen volgens EPC.
|
||||
|
||||
\[
|
||||
P_{loss} = I^2R_{DS(on)} + P_{loss,sw}
|
||||
\]
|
||||
|
||||
\(P_{loss,sw}\): schakel verliezen
|
||||
|
||||
\(R_{DS(on)} = 10m\Omega\) dus bij \(50A\):
|
||||
|
||||
\[
|
||||
P_{loss} = 50^2 \cdot 0.01 + P_{loss,sw} = 25W + P_{loss,sw}
|
||||
\]
|
||||
|
||||
\(P_{loss,sw}\) is voor GaNFET's erg laag, in de simulatie - die
|
||||
gebaseerd is op de voorbeeld simulatie van EPC - schakelt die binnen
|
||||
\(4ns\). Als we vanuit gaan van linieer schakelgedrag met liniare
|
||||
oplopende stroom (wat tot veel hogeve verliezen lijd dan de
|
||||
werkelijkheid)
|
||||
|
||||
\[
|
||||
P_{loss,sw} = \frac{UIt}{2} \cdot 2f_s
|
||||
\]
|
||||
|
||||
\(U\): voedings spanning \(I\): stroom \(t\): schakeltijd \(f_s\): de
|
||||
schakel frequentie
|
||||
|
||||
Als je dit invult:
|
||||
|
||||
\(U = 120V\), \(I = 50A\), \(t = 4 ns\), \(f_s = 50 kHz\) dan is
|
||||
\(P_{loss,sw} = 1.2 W\).
|
||||
|
||||
Dit geeft een totaal van \(P_{loss} = 16.2W\). Dit is berekent met een
|
||||
ruime schakelverlies met bijna \(100\%\) PWM. De werkelijkheid zal het
|
||||
minder zijn.
|
||||
|
||||
\subsubsection{Stroom Meting}\label{stroom-meting}
|
||||
|
||||
Heel eerlijk, deze was ik een beetje vergeten, dus heb snel de ACS724
|
||||
toegevoegd. Nu hopen dat die de piek stromen aan kan.
|
||||
|
||||
\subsubsection{Hoek Sensor}\label{hoek-sensor}
|
||||
|
||||
Het meten van de hoek hebben we drie manieren voor gevonden:
|
||||
|
||||
\begin{itemize}
|
||||
\tightlist
|
||||
\item
|
||||
afstand sensoren naar de grond
|
||||
\end{itemize}
|
||||
|
||||
Als de grond wat scheef is zal het reactiewiel het voertuig scheef (ten
|
||||
opzichte van zwaartekracht), waardoor het wiel steeds sneller gaat
|
||||
draaien tot die de maximale snelheid bereikt, dan valt het voertuig om.
|
||||
Niet heel handig dus.
|
||||
|
||||
\begin{itemize}
|
||||
\tightlist
|
||||
\item
|
||||
MEMS-Gyroscoop
|
||||
\end{itemize}
|
||||
|
||||
Meet direct de hoek en is snel. Nadeel is als deze afwijkt veranderd de
|
||||
nul positie en gaat die balanceren op het verkeerde punt.
|
||||
|
||||
\begin{itemize}
|
||||
\tightlist
|
||||
\item
|
||||
MEMS-Versnellingsmeter
|
||||
\end{itemize}
|
||||
|
||||
Meet de zwaartekracht direct, dus verliest de nul positie niet, maar
|
||||
wordt verstoord bij een stoot.
|
||||
|
||||
De beste optie is een combinatie van een MEMS-gyroscoop en een
|
||||
MEMS-versnellingsmeter. De versnellingsmeter zorgt er voor dat de nul
|
||||
positie niet verloren gaat. En de gyroscoop voor nauwkeurige meting van
|
||||
de hoek. Deze combinatie wordt ook een IMU (Inertial measurement unit)
|
||||
genoemd.
|
||||
|
||||
Uiteindelijk is de M5Stack IMU Pro Mini gekozen, dit is een module in
|
||||
behuizing met een connector. Dit is erg handig, omdat deze goed
|
||||
schokvrij bevestigt moet worden. Er zit ook nog een kompas en luchtdruk
|
||||
sensor op, maar er zijn geen plannen om deze te gebruiken.
|
||||
|
||||
In deze module zit de BMI270\footnote{\url{https://www.bosch-sensortec.com/products/motion-sensors/imus/bmi270/}}
|
||||
van Bosch. De I\textsuperscript{2}C bus van deze IC is direct verbonden
|
||||
met de connector naar buiten toe.
|
||||
|
||||
\subsubsection{Microcontroller}\label{microcontroller}
|
||||
|
||||
Er zijn niet veel vereisten voor de microcontroller, bijna alle
|
||||
microcontrollers hebben SPI, I2C interfaces en een ADC voor de stroom
|
||||
meting. Het belangrijkste is dat die genoeg rekenkracht heeft voor de
|
||||
FOC berekeningen.
|
||||
|
||||
Uiteindelijk is gekozen voor een RP2040 van Raspberry Pi, deze heeft
|
||||
twee ARM Cortex M0+ cores die tot 150 MHz aan kunnen. Het grote voordeel
|
||||
van deze microcontroller is dat ik al een ontwerp klaar heb liggen met
|
||||
alle benodigde componenten.
|
||||
|
||||
\subsubsection{Encoder}\label{encoder}
|
||||
|
||||
Voor FOC moet de positie van polen (magneten) in de rotor ten opzichte
|
||||
van de slots (elektro magneten) in de rotor. Hoe nauwkeuriger dit is hoe
|
||||
effectiever de FOC is om met maximale vermogen uit de motor te kunnen
|
||||
halen.
|
||||
|
||||
Veel motoren worden geleverd met drie hall-effect sensoren die deze
|
||||
relatieve positie direct meten, allen zijn deze niet heel nauwkeurig op
|
||||
lage snelheden.
|
||||
|
||||
Een Relatieve rotary encoder, zoals een optische die sloten telt in een
|
||||
schrijf die gemonteerd is aan de rotor, kan veel nauwkeuriger. Het
|
||||
nadeel is dat deze gekalibreerd moet worden elke keer als de stroom er
|
||||
afgaat.
|
||||
|
||||
Een absolute rotary encoder hoeft maar 1 keer gekalibreerd te worden. De
|
||||
meeste. Er zijn twee soorten absolute encoders die veel gebruikt worden,
|
||||
een die om een as gemonteerd worden (zoals de AMT212B-V\footnote{\url{https://www.sameskydevices.com/product/motion-and-control/rotary-encoders/absolute/modular/amt212b-v}})
|
||||
of een die de oriëntatie van een magneet meet (zoals de
|
||||
AS5600\footnote{\url{https://ams-osram.com/products/sensor-solutions/position-sensors/ams-as5600-position-sensor}}).
|
||||
|
||||
Er is gekozen voor een breakout board te kopen van de AS5600, deze is
|
||||
het makkelijkst de monteren en goed verkrijgbaar van de absolute
|
||||
encoders.
|
||||
|
||||
\subsection{Schema}\label{schema}
|
||||
|
||||
Het schema is gemaakt in KiCad
|
||||
|
||||
\subsubsection{Half-bridge}\label{half-bridge}
|
||||
|
||||
Voor een BLDC-motor driver zijn drie half-bridges nodig. Bij een ontwerp
|
||||
van een half bridge zijn twee belangrijke dingen, naast component keuze.
|
||||
De gate driver en de power filtering.
|
||||
|
||||
\paragraph{Power Filtering}\label{power-filtering}
|
||||
|
||||
In dit ontwerp worden GaNFET's gebruikt, deze schadelijk binnen enkele
|
||||
nanosecondes. Eleke hoeveelheid aan inductie vanaf de voeding vertraagt
|
||||
deze snelheid, en is een antenne voor de honderden MHz dat door deze
|
||||
schakelsnelheid gegenereerd wordt. Er moeten dus condensatoren zo dicht
|
||||
mogelijk bij de FET's om de inductie zo minimaal mogelijk te maken. Deze
|
||||
moeten ook keramische zijn door de lage ESR. Een nadeel is dat deze voor
|
||||
veel motor drijvers eigenlijk te groot zijn waardoor de afstand tussen
|
||||
de condensator en FET's te groot wordt als de filtering in 1 stage gaat.
|
||||
|
||||
Om te berekenen hoeveel stages nodig zijn, moet eerste de layout gemaakt
|
||||
worden (hier meer over in het hooftstuk PCB). Bij de layout is het geluk
|
||||
om \(7.2 \mu F\) (5 x \(1\mu F\) en 1 x \(2.2\mu F\)) in de eerste stage
|
||||
te plaatsen.
|
||||
|
||||
\begin{quote}
|
||||
TODO: ref to hooftstuk pcb needed!
|
||||
\end{quote}
|
||||
|
||||
Na veel experimenteren in een simulatie in LTspice lijkt \(7.2\mu F\)
|
||||
wel weinig, het zal een stuk beter zijn als er \(20\mu F\) zal passen.
|
||||
|
||||
De tweede stage is wat klein gehouden, om in inschakelstroom beperkt te
|
||||
houden. Dit betekent wel dat er erg dikke kabels nodig zijn om het
|
||||
volledige vermogen aan te kunnen.
|
||||
|
||||
Helaas is de simulatie gecrasht en het bestand corrupt geraakt. Het is
|
||||
hierna niet meer gelukt om de simulatie stabiel opnieuw op te bouwen
|
||||
(vermogens van honderden KW bij een kleine aanpassing). Onder staat is
|
||||
de schakeling van de opnieuw opgebouwde schakeling die dus niet werkt.
|
||||
|
||||
\begin{figure}
|
||||
\centering
|
||||
\includegraphics{../../latex/images/7f783ce7-ee05-4193-844f-240cbec98bce.png}
|
||||
\caption{Schakeling simulatie power filter}
|
||||
\end{figure}
|
||||
|
||||
C2 zijn de keramische condensatoren vlak bij de FET's (eerste stage), C3
|
||||
en C1 zijn solid polymer aluminum capacitors voor de tweede stage. L4 is
|
||||
een ingeschatte inductie van de verbinding tussen de condensatoren en L5
|
||||
is de inductie van de kabels vanaf de accu.
|
||||
|
||||
De condensator waardes zijn een stuk groter dan op het evaluatiebord.
|
||||
Hier zitten 7 condensatoren van \(22nF\) op (\(125nF\) totaal). Ik
|
||||
vermoed dat mijn simulaties wat pessimistischer zijn dat de
|
||||
werkelijkheid.
|
||||
|
||||
\paragraph{Gate Driver}\label{gate-driver-1}
|
||||
|
||||
Het simulatiemodel van de gate driver IC is alleen beschikbaar voor
|
||||
Simplus. Het is mij niet gelukt om de gratis versie van deze software
|
||||
werkend te krijgen of het model te converteren naar een ander format.
|
||||
Dus het berekenen of simuleren voor gate driver gaat niet lukken. Dus ik
|
||||
heb een referentieontwerp van EPC overgenomen met een \(0\Omega\)
|
||||
weerstand bij de sync (hier is wel een \(0\Omega\) jumper gebruikt zodat
|
||||
die later vervangen kan worden met een weerstand) en \(0.39\Omega\) voor
|
||||
de source.
|
||||
|
||||
\subsubsection{Microcontroller}\label{microcontroller-1}
|
||||
|
||||
De microcontroller schakeling is een kopie van een hobby project, deze
|
||||
schakeling is al getest. Er is niks veranderd aan dit ontwerp voor dit
|
||||
project, behalve dat er andere io pinnen gebruikt worden.
|
||||
|
||||
\subsection{PCB}\label{pcb}
|
||||
|
||||
\subsubsection{Stroom Distributie}\label{stroom-distributie}
|
||||
|
||||
Vijftig ampère is erg veel voor een PCB.
|
||||
|
||||
\begin{quote}
|
||||
KiCad Calculator Tools:\\
|
||||
``The calculations are valid for currents up to \(35 A\) (external) or
|
||||
\(17.5 A\) (internal), temperature rises up to \(100^\circ C\), and
|
||||
widths of up to 400 mils (10mm)''
|
||||
\end{quote}
|
||||
|
||||
Deze tool heeft voor \(35A\), \(150mm\) spoor lengte en
|
||||
\(10^\circ C\Delta\) met \(70\mu m\) koper een spoor breedte van
|
||||
\(20.2mm\). De spoorbreedte is al buiten het berijk van deze tool. Als
|
||||
we toch de stroom verandert naar \(50A\) wordt dit \(33.1mm\).
|
||||
|
||||
Met dezelfde instellingen voor \(50A\) in de calculator van DigiKey
|
||||
keeft die dezelfde resultatie. En die van AdvancedPCB, PCBWay en OMNI
|
||||
calculator. Of ze gebruiken allemaal dezelfde beperkte formule of het
|
||||
klopt redelijk.
|
||||
|
||||
Er is gekozen om een spoor breedte van \(40mm\) te gebruiken om iets
|
||||
marge te hebben als deze rekenmachines afwijken. Dit is erg breed, dus
|
||||
dit verdeeld gedaan over een buiten laag en een binnen laag plus nog een
|
||||
extra marge omdat binnenlagen minder goed koelen. De lagen zijn om en om
|
||||
gedaan, zodat het beetje capaciteit tussen deze lagen de inductie ietsje
|
||||
compenseert.
|
||||
|
||||
\subsubsection{Half-bridges}\label{half-bridges}
|
||||
|
||||
Gelukkig heeft EPC (de fabrikant van de FET's) een aantal aangeraden
|
||||
layouts.
|
||||
|
||||
\begin{figure}
|
||||
\centering
|
||||
\includegraphics{../../latex/images/e4a587e6-798b-4fed-8518-9574473bdf79.png}
|
||||
\caption{Aangeraden PCB layout van EPC}
|
||||
\end{figure}
|
||||
|
||||
Bij dit project worden de high-side (HS) en low-side (LS) FET's ongeveer
|
||||
hetzelfde belast, dus ze hebben dezelfde koeling nodig. Dus er is voor
|
||||
de middelste optie gekozen.
|
||||
|
||||
\begin{figure}
|
||||
\centering
|
||||
\includegraphics{../../latex/images/43a7f9a1-a3d6-4f2b-844e-be65623e1b12.png}
|
||||
\caption{3D render van een van de half-brdige layouts}
|
||||
\end{figure}
|
||||
|
||||
Hierboven is de layout te zien. De rij condensatoren in het midden
|
||||
tussen de twee FET's (met veel vias er omheen). Rechts daar van de
|
||||
SOIC-8 is de stroom meting IC en rechts onderin de gate driver.
|
||||
|
||||
De uitgang van de FET's voor de stroom meet IC is er ook in de binnen
|
||||
laag direct onder de top laat (de render is van de top laag). Deze zit
|
||||
er om de stroom loop zo'n klein mogelijk oppervlak te geven met de
|
||||
condensatoren, door er onder door te gaan. Hierom stoppen de vias van de
|
||||
voeding ook zo abrupt.
|
||||
|
||||
\newpage
|
||||
|
||||
\section{Productie}\label{productie}
|
||||
|
||||
De PCB en stencel zijn gepoduceert door JLCPCB en de componenten zijn
|
||||
gelaats en in de reflow oven gegaan in het SMD-lab op Accademiplein.
|
||||
|
||||
Na dat die uit de over kwam zijn er een aantal soleer balletjes
|
||||
weggehaald, twee soldeer bruggen weg gehaald bij een van de gate driver
|
||||
IC's en de microcontroller opnieuwe met de hand erop gelaast. De
|
||||
microcontroller had teveel tin op de groundpad aan de onderkant,
|
||||
waardoor deze omhoog kwam en de pinnen aan de zijkant boven de PCB
|
||||
zweefde onder contact.
|
||||
|
||||
|
||||
|
||||
|
||||
\end{document}
|
||||
183
latex/detailontwerp_stuursysteem.latex
Normal file
@@ -0,0 +1,183 @@
|
||||
\documentclass[11pt]{article}
|
||||
\usepackage[a4paper, portrait, includehead, includefoot, margin=1.5cm]{geometry}
|
||||
|
||||
\usepackage[dutch]{babel}
|
||||
|
||||
\usepackage{pdfpages}
|
||||
|
||||
\usepackage{xcolor}
|
||||
\usepackage{makecell}
|
||||
\usepackage{tabularx}
|
||||
\usepackage{adjustbox}
|
||||
|
||||
\usepackage{framed}
|
||||
|
||||
\usepackage{longtable}
|
||||
\providecommand{\tightlist}{\setlength{\itemsep}{0pt}\setlength{\parskip}{0pt}}
|
||||
\usepackage{booktabs}
|
||||
|
||||
\usepackage{fontspec}
|
||||
\usepackage{xunicode}
|
||||
\usepackage{xltxtra}
|
||||
|
||||
\newfontfamily\fontRoboto[]{Roboto}
|
||||
\newfontfamily\fontUbuntu[]{Ubuntu}
|
||||
\setmainfont{Roboto}
|
||||
|
||||
% \usepackage[style=ieee]{biblatex}
|
||||
% \usepackage{csquotes}
|
||||
% \addbibresource{bibliography.bib}
|
||||
|
||||
% header and footer
|
||||
\usepackage{fancyhdr}
|
||||
\renewcommand{\headrule}{}
|
||||
|
||||
\usepackage[nodayofweek]{datetime}
|
||||
|
||||
\definecolor{darkishyellow}{rgb}{177, 179, 173}
|
||||
|
||||
% for images
|
||||
\usepackage{graphbox}
|
||||
|
||||
% add bookmarks with \hypertarget
|
||||
\usepackage{bookmark}
|
||||
\usepackage{hyperref}
|
||||
|
||||
% heading numberging
|
||||
\setcounter{secnumdepth}{3}
|
||||
\renewcommand\thesection{{\fontUbuntu\arabic{section}}}
|
||||
\renewcommand\thesubsection{{\fontUbuntu\arabic{section}.\arabic{subsection}}}
|
||||
\renewcommand\thesubsubsection{{\fontUbuntu\arabic{section}.\arabic{subsection}.\arabic{subsubsection}}}
|
||||
\usepackage{sectsty}
|
||||
\allsectionsfont{\fontUbuntu}
|
||||
\setlength{\headheight}{14pt}
|
||||
|
||||
% no indent at paragraphs
|
||||
\usepackage{parskip}
|
||||
\usepackage{setspace}
|
||||
\setstretch{1.1}
|
||||
\let\tmpitem\itemize
|
||||
\let\tmpenditem\enditemize
|
||||
\renewenvironment{itemize}{\tmpitem\setlength\itemsep{-.4em}}{\tmpenditem}
|
||||
|
||||
\begin{document}
|
||||
\raggedright
|
||||
\pagecolor{darkishyellow}
|
||||
|
||||
\begin{titlepage}
|
||||
\null\vfill
|
||||
\begin{center}
|
||||
{\Huge\fontUbuntu \par}
|
||||
\vskip 3em
|
||||
% \includegraphics{assets/eriks.50.png}
|
||||
\vskip 3em
|
||||
{\huge\fontUbuntu Superlight Personal Carrier \par}
|
||||
\end{center}
|
||||
\vskip 25em
|
||||
{
|
||||
\large
|
||||
\lineskip .75em
|
||||
\begin{tabular}{r l}
|
||||
gemaakt door: & Finley van Reenen (0964590@hr.nl) \\
|
||||
& Chris Tan (0992143@hr.nl) \\
|
||||
& Tijn Snijders (1001829@hr.nl) \\
|
||||
& Max Kappert (1030682@hr.nl) \\
|
||||
& Thomas Braam (0989527@hr.nl) \\\\
|
||||
vak code: & ELEPEE51 \\\\
|
||||
ge\"exporteerd op: & \today
|
||||
\end{tabular}
|
||||
}
|
||||
\vfill\null
|
||||
\end{titlepage}
|
||||
|
||||
\pagestyle{fancy}
|
||||
\fancyhead{} % clear all header fields
|
||||
\fancyhead[LO]{\color{gray}\fontUbuntu }
|
||||
\fancyhead[RO]{\color{gray}\fontUbuntu Superlight Personal Carrier}
|
||||
\fancyfoot{} % clear all footer fields
|
||||
\fancyfoot[LO]{\color{gray}\fontUbuntu E.L.F. van Reenen, C. Tan, T Snijders, M. Kappert en T. Braam}
|
||||
\fancyfoot[CO]{\color{gray}\fontUbuntu }
|
||||
\fancyfoot[RO]{\color{gray}\fontUbuntu \thepage}
|
||||
|
||||
|
||||
|
||||
|
||||
\newpage
|
||||
|
||||
\section{Vehicle Control unit}\label{vehicle-control-unit}
|
||||
|
||||
De VCU is een belangrijk onderdeel van het systeem, hiermee kunnen we
|
||||
het voertuig in een richting sturen en vooruit bewegen, de belangrijkste
|
||||
keuzes hierin zijn in welke taal we willen gaan programmeren en wat voor
|
||||
soort microcontroller we willen. De reden hiervoor is zodat de volgende
|
||||
team makkelijker kan omgaan met de code en het systeem makkelijker
|
||||
kunnen uitbreiden. het makkelijkst is dan om met de Arduino IDE en taal
|
||||
verder te gaan, omdat het een bekent en veel gedocumenteerd systeem is
|
||||
waar je veel over kan vinden op internet tegenover veel andere IDE's,
|
||||
programmeer talen en microcontrollers. verder moet het ook draadloos
|
||||
verbinding kunnen maken met een console controller zodat de volgende
|
||||
teams eventueel een andere keuze kunnen maken hoe ze willen sturen.
|
||||
Daarom hebben we voor de ESP32 gekozen omdat het alles aantikt met een
|
||||
gezond aantal GPIO pinnen.
|
||||
|
||||
\newpage
|
||||
|
||||
\section{Actuator}\label{actuator}
|
||||
|
||||
De actuator hebben we nodig om de wielen in een richting te kunnen
|
||||
sturen volgens Max Kappert(student automotive engineer) hebben we de
|
||||
volgende parameters gekregen die we nodig hebben om het voertuig te
|
||||
kunnen sturen.
|
||||
|
||||
\begin{longtable}[]{@{}
|
||||
>{\raggedright\arraybackslash}p{(\columnwidth - 6\tabcolsep) * \real{0.4051}}
|
||||
>{\raggedright\arraybackslash}p{(\columnwidth - 6\tabcolsep) * \real{0.1646}}
|
||||
>{\raggedright\arraybackslash}p{(\columnwidth - 6\tabcolsep) * \real{0.1519}}
|
||||
>{\raggedright\arraybackslash}p{(\columnwidth - 6\tabcolsep) * \real{0.2785}}@{}}
|
||||
\toprule\noalign{}
|
||||
\begin{minipage}[b]{\linewidth}\raggedright
|
||||
Parameter
|
||||
\end{minipage} & \begin{minipage}[b]{\linewidth}\raggedright
|
||||
Waarde
|
||||
\end{minipage} & \begin{minipage}[b]{\linewidth}\raggedright
|
||||
Eenheid
|
||||
\end{minipage} & \begin{minipage}[b]{\linewidth}\raggedright
|
||||
Opmerking
|
||||
\end{minipage} \\
|
||||
\midrule\noalign{}
|
||||
\endhead
|
||||
\bottomrule\noalign{}
|
||||
\endlastfoot
|
||||
Voertuigspanning & 12 - 14 & \(V_{DC}\) & typisch voor auto-ECU's \\
|
||||
Stuurspanningdemperkle & 0 - 5 & \(V_{DC}\) & naloge regeling \\
|
||||
PWM-signaal frequentie & 1000 - 3000 & \(Hz\) & Typische range voor
|
||||
aansturing \\
|
||||
PWM duty cycle & 10 - 90 & \(\%\) & \(0%
|
||||
\): minimale demping, \(90%
|
||||
\): maximale demping \\
|
||||
Stroomverbruik klep & 0.5 - 2 & \(A\) & Afhankelijk van de interne
|
||||
weerstand \\
|
||||
Wielsnelheid & 0 - 250 & \(km/h\) & Meet snelheid per wiel \\
|
||||
Karrosserieversnelling & -3 tot +3 & \(g\) & Laterale en verticale
|
||||
versnellingen \\
|
||||
Axiale potentiometer (veerweg) & 0 - 50 & \(mm\) & Meet veeruitslag \\
|
||||
Temperatuur werkbereik & -40 tot +85 & \(^\circ C\) &
|
||||
Automobielstandaard \\
|
||||
\end{longtable}
|
||||
|
||||
Voor de Actuator is er een keuze gemaakt voor CDC (Continuous Damping
|
||||
Control) demper van SACHS, Maar vanwege de besteltijden van dit soort
|
||||
componenten kunnen we dit niet gebruiken. Daarom gebruiken we een
|
||||
actuator die er al staat, de A0-01/M van S-LINE. om de actuator te
|
||||
besturen gebruiken we een motordriver, de MDD20A. Dit is omdat we het al
|
||||
hebben en werkt met de huidige actuatoren en voldoende de parameters van
|
||||
de actuatoren behaald, daarom hebben we besloten om niet een nieuwe te
|
||||
kopen of te ontwerpen. Om ervoor te zorgen dat de actuatoren niet te ver
|
||||
gaan gebruiken we de AS5600 magnetic encoder. Dit is omdat de encoder
|
||||
een absoluut positie meegeeft en daarom voor minder problemen zorgt als
|
||||
het voertuig opnieuw opstart.
|
||||
|
||||
|
||||
|
||||
|
||||
\end{document}
|
||||
BIN
latex/images/0623b75b-1585-421a-9329-4feba9e00ae2.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 89 KiB |
BIN
latex/images/224f3e03-21c4-4034-8905-9848007b253e.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 47 KiB |
BIN
latex/images/43a7f9a1-a3d6-4f2b-844e-be65623e1b12.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 124 KiB |
BIN
latex/images/4aa438b9-f968-4ed9-97f3-dfb934130f6d.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 35 KiB |
BIN
latex/images/506da834-573f-4c24-8b22-15e82df64301.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 22 KiB |
BIN
latex/images/6f8ac25b-16f5-41ae-b7cf-980ddfbfbfd7.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 59 KiB |
BIN
latex/images/7f783ce7-ee05-4193-844f-240cbec98bce.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 6.5 KiB |
BIN
latex/images/93b15853-82d2-48a2-9cbb-bdf3f4b0fb4b.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 59 KiB |
BIN
latex/images/958b5da9-80bc-4069-9a13-acc8a0fe6b5b.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 88 KiB |
BIN
latex/images/99a21b34-2ff8-475c-8fef-296368d93bae.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 17 KiB |
BIN
latex/images/b87f75dc-87b1-47a9-adfe-bc389c5377fb.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 30 KiB |
BIN
latex/images/c75e80d7-dcc2-454e-adb2-dc4a1925b2bf.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 44 KiB |
BIN
latex/images/c776081d-b52e-40b8-84f4-065145305f76.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 55 KiB |
BIN
latex/images/c7dcc010-3e60-4f73-a520-a128e600615a.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 43 KiB |
BIN
latex/images/d62ce8e7-705b-46da-884c-e3da26c39be9.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 53 KiB |
BIN
latex/images/e4a587e6-798b-4fed-8518-9574473bdf79.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 63 KiB |
BIN
latex/images/f2dbe830-87ac-4a88-95da-f53177a114a1.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 139 KiB |
BIN
latex/images/fcc86ab9-d051-411d-8379-9d4223c5f4a4.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 23 KiB |
1138
latex/plan_van_aanpak.latex
Normal file
2784
latex/projectdocument.latex
Normal file
168
latex/softwareontwerp_stabilisatie.latex
Normal file
@@ -0,0 +1,168 @@
|
||||
\documentclass[11pt]{article}
|
||||
\usepackage[a4paper, portrait, includehead, includefoot, margin=1.5cm]{geometry}
|
||||
|
||||
\usepackage[dutch]{babel}
|
||||
|
||||
\usepackage{pdfpages}
|
||||
|
||||
\usepackage{xcolor}
|
||||
\usepackage{makecell}
|
||||
\usepackage{tabularx}
|
||||
\usepackage{adjustbox}
|
||||
|
||||
\usepackage{framed}
|
||||
|
||||
\usepackage{longtable}
|
||||
\providecommand{\tightlist}{\setlength{\itemsep}{0pt}\setlength{\parskip}{0pt}}
|
||||
\usepackage{booktabs}
|
||||
|
||||
\usepackage{fontspec}
|
||||
\usepackage{xunicode}
|
||||
\usepackage{xltxtra}
|
||||
|
||||
\newfontfamily\fontRoboto[]{Roboto}
|
||||
\newfontfamily\fontUbuntu[]{Ubuntu}
|
||||
\setmainfont{Roboto}
|
||||
|
||||
% \usepackage[style=ieee]{biblatex}
|
||||
% \usepackage{csquotes}
|
||||
% \addbibresource{bibliography.bib}
|
||||
|
||||
% header and footer
|
||||
\usepackage{fancyhdr}
|
||||
\renewcommand{\headrule}{}
|
||||
|
||||
\usepackage[nodayofweek]{datetime}
|
||||
|
||||
\definecolor{darkishyellow}{rgb}{177, 179, 173}
|
||||
|
||||
% for images
|
||||
\usepackage{graphbox}
|
||||
|
||||
% add bookmarks with \hypertarget
|
||||
\usepackage{bookmark}
|
||||
\usepackage{hyperref}
|
||||
|
||||
% heading numberging
|
||||
\setcounter{secnumdepth}{3}
|
||||
\renewcommand\thesection{{\fontUbuntu\arabic{section}}}
|
||||
\renewcommand\thesubsection{{\fontUbuntu\arabic{section}.\arabic{subsection}}}
|
||||
\renewcommand\thesubsubsection{{\fontUbuntu\arabic{section}.\arabic{subsection}.\arabic{subsubsection}}}
|
||||
\usepackage{sectsty}
|
||||
\allsectionsfont{\fontUbuntu}
|
||||
\setlength{\headheight}{14pt}
|
||||
|
||||
% no indent at paragraphs
|
||||
\usepackage{parskip}
|
||||
\usepackage{setspace}
|
||||
\setstretch{1.1}
|
||||
\let\tmpitem\itemize
|
||||
\let\tmpenditem\enditemize
|
||||
\renewenvironment{itemize}{\tmpitem\setlength\itemsep{-.4em}}{\tmpenditem}
|
||||
|
||||
\begin{document}
|
||||
\raggedright
|
||||
\pagecolor{darkishyellow}
|
||||
|
||||
\begin{titlepage}
|
||||
\null\vfill
|
||||
\begin{center}
|
||||
{\Huge\fontUbuntu Softwareontwerp Sabilisatie \par}
|
||||
\vskip 3em
|
||||
% \includegraphics{assets/eriks.50.png}
|
||||
\vskip 3em
|
||||
{\huge\fontUbuntu Superlight Personal Carrier \par}
|
||||
\end{center}
|
||||
\vskip 25em
|
||||
{
|
||||
\large
|
||||
\lineskip .75em
|
||||
\begin{tabular}{r l}
|
||||
gemaakt door: & Finley van Reenen (0964590@hr.nl) \\
|
||||
& Chris Tan (0992143@hr.nl) \\
|
||||
& Tijn Snijders (1001829@hr.nl) \\
|
||||
& Max Kappert (1030682@hr.nl) \\
|
||||
& Thomas Braam (0989527@hr.nl) \\\\
|
||||
vak code: & ELEPEE51 \\\\
|
||||
ge\"exporteerd op: & \today
|
||||
\end{tabular}
|
||||
}
|
||||
\vfill\null
|
||||
\end{titlepage}
|
||||
|
||||
\pagestyle{fancy}
|
||||
\fancyhead{} % clear all header fields
|
||||
\fancyhead[LO]{\color{gray}\fontUbuntu Softwareontwerp Sabilisatie}
|
||||
\fancyhead[RO]{\color{gray}\fontUbuntu Superlight Personal Carrier}
|
||||
\fancyfoot{} % clear all footer fields
|
||||
\fancyfoot[LO]{\color{gray}\fontUbuntu E.L.F. van Reenen, C. Tan, T Snijders, M. Kappert en T. Braam}
|
||||
\fancyfoot[CO]{\color{gray}\fontUbuntu }
|
||||
\fancyfoot[RO]{\color{gray}\fontUbuntu \thepage}
|
||||
|
||||
|
||||
|
||||
|
||||
\newpage
|
||||
|
||||
\section{inleiding}\label{inleiding}
|
||||
|
||||
\newpage
|
||||
|
||||
\section{FoC library}\label{foc-library}
|
||||
|
||||
In C zijn er niet veel librarys voor FOC, de enige goede library die we
|
||||
hebben gevonden is \href{https://www.simplefoc.com/}{SimpleFOCproject}.
|
||||
Dit komt er in debuurd van een framework. In de video van de homepagina
|
||||
worden een aantal gemeenschaps projecten laten zien, waarvan meerdere
|
||||
een reactiewiel voor sabilisatie laat zien. Dit belooft veel goeds, toch
|
||||
is er gekozen om een andere library te kiezen. Het goed implementeren
|
||||
van een regel kring met de IMU vraagd veel kennis van hoe dit
|
||||
`framework' werkt. Onze implementatie is niet exact het zelfde als die
|
||||
van deze gemeenschaps projecten. Wij hebben dus de kennis nogdig om deze
|
||||
code aan te passen.
|
||||
|
||||
Er is gekozen om te werken met de \href{https://lib.rs/crates/foc}{Rust
|
||||
library FOC}. Deze library is alleen een implementatie voor het FOC
|
||||
algaritme, wadoor er meer flexibilitijd is hoe het systeem verder werkt.
|
||||
Dit kan dus ook verder geoptimaliseerd worden en meer ge configureerd.
|
||||
dat tweede is de grootste reden warom voor deze library is gekozen. Er
|
||||
is behoefte aan een systeem dat aangepast kan worden naar wat later
|
||||
beter blijkt te zijn.
|
||||
|
||||
\newpage
|
||||
|
||||
\section{Rust op RP2040}\label{rust-op-rp2040}
|
||||
|
||||
Rust voor microcontrollers is nog in een sooft alpha versie. Het werkt
|
||||
voor het grootste deel, maar hier en daar zijn nog wat beperkingen.
|
||||
Vrijwel al deze beperkingen hebben een workaround. Het groote voordeel
|
||||
is dat er een `officele' standaard is voor het HAL interface\footnote{embeded-hal:
|
||||
\url{https://docs.rs/embedded-hal}}. Dit maakt zorgd er voor dat er
|
||||
veel librarys voor IC's beschikbaar zijn die gewoon werken.
|
||||
|
||||
\newpage
|
||||
|
||||
\section{Async}\label{async}
|
||||
|
||||
De standaard async funtionalitijd in rust werkt nog niet voor
|
||||
microcontrollers\footnote{\url{https://www.youtube.com/watch?v=H7NtzyP9q8E}}.
|
||||
Hier zijn wel alternative librarys voor\footnote{\url{https://arewertosyet.com/}},
|
||||
Embassy\footnote{\url{https://embassy.dev/}} en RTIC\footnote{\url{https://rtic.rs}}
|
||||
zijn de twee die het meest genoemd worden. Embassy ziet er wat
|
||||
eenvoudiger uit als RTIC, daarvoor is ook gekozen om te gebruiken.
|
||||
|
||||
\newpage
|
||||
|
||||
\section{AS5600}\label{as5600}
|
||||
|
||||
Er wordt gebruik gemaakt de AS5600 library van Rafael
|
||||
Bachmann\footnote{\url{https://github.com/barafael/as5600-rs}}.
|
||||
|
||||
\newpage
|
||||
|
||||
\section{}\label{section}
|
||||
|
||||
|
||||
|
||||
|
||||
\end{document}
|
||||
407
latex/unittest_stabilisatie.latex
Normal file
@@ -0,0 +1,407 @@
|
||||
\documentclass[11pt]{article}
|
||||
\usepackage[a4paper, portrait, includehead, includefoot, margin=1.5cm]{geometry}
|
||||
|
||||
\usepackage[dutch]{babel}
|
||||
|
||||
\usepackage{pdfpages}
|
||||
|
||||
\usepackage{xcolor}
|
||||
\usepackage{makecell}
|
||||
\usepackage{tabularx}
|
||||
\usepackage{adjustbox}
|
||||
|
||||
\usepackage{framed}
|
||||
|
||||
\usepackage{longtable}
|
||||
\providecommand{\tightlist}{\setlength{\itemsep}{0pt}\setlength{\parskip}{0pt}}
|
||||
\usepackage{booktabs}
|
||||
|
||||
\usepackage{fontspec}
|
||||
\usepackage{xunicode}
|
||||
\usepackage{xltxtra}
|
||||
|
||||
\newfontfamily\fontRoboto[]{Roboto}
|
||||
\newfontfamily\fontUbuntu[]{Ubuntu}
|
||||
\setmainfont{Roboto}
|
||||
|
||||
% \usepackage[style=ieee]{biblatex}
|
||||
% \usepackage{csquotes}
|
||||
% \addbibresource{bibliography.bib}
|
||||
|
||||
% header and footer
|
||||
\usepackage{fancyhdr}
|
||||
\renewcommand{\headrule}{}
|
||||
|
||||
\usepackage[nodayofweek]{datetime}
|
||||
|
||||
\definecolor{darkishyellow}{rgb}{177, 179, 173}
|
||||
|
||||
% for images
|
||||
\usepackage{graphbox}
|
||||
|
||||
% add bookmarks with \hypertarget
|
||||
\usepackage{bookmark}
|
||||
\usepackage{hyperref}
|
||||
|
||||
% heading numberging
|
||||
\setcounter{secnumdepth}{3}
|
||||
\renewcommand\thesection{{\fontUbuntu\arabic{section}}}
|
||||
\renewcommand\thesubsection{{\fontUbuntu\arabic{section}.\arabic{subsection}}}
|
||||
\renewcommand\thesubsubsection{{\fontUbuntu\arabic{section}.\arabic{subsection}.\arabic{subsubsection}}}
|
||||
\usepackage{sectsty}
|
||||
\allsectionsfont{\fontUbuntu}
|
||||
\setlength{\headheight}{14pt}
|
||||
|
||||
% no indent at paragraphs
|
||||
\usepackage{parskip}
|
||||
\usepackage{setspace}
|
||||
\setstretch{1.1}
|
||||
\let\tmpitem\itemize
|
||||
\let\tmpenditem\enditemize
|
||||
\renewenvironment{itemize}{\tmpitem\setlength\itemsep{-.4em}}{\tmpenditem}
|
||||
|
||||
\begin{document}
|
||||
\raggedright
|
||||
\pagecolor{darkishyellow}
|
||||
|
||||
\begin{titlepage}
|
||||
\null\vfill
|
||||
\begin{center}
|
||||
{\Huge\fontUbuntu \par}
|
||||
\vskip 3em
|
||||
% \includegraphics{assets/eriks.50.png}
|
||||
\vskip 3em
|
||||
{\huge\fontUbuntu Superlight Personal Carrier \par}
|
||||
\end{center}
|
||||
\vskip 25em
|
||||
{
|
||||
\large
|
||||
\lineskip .75em
|
||||
\begin{tabular}{r l}
|
||||
gemaakt door: & Finley van Reenen (0964590@hr.nl) \\
|
||||
& Chris Tan (0992143@hr.nl) \\
|
||||
& Tijn Snijders (1001829@hr.nl) \\
|
||||
& Max Kappert (1030682@hr.nl) \\
|
||||
& Thomas Braam (0989527@hr.nl) \\\\
|
||||
vak code: & ELEPEE51 \\\\
|
||||
ge\"exporteerd op: & \today
|
||||
\end{tabular}
|
||||
}
|
||||
\vfill\null
|
||||
\end{titlepage}
|
||||
|
||||
\pagestyle{fancy}
|
||||
\fancyhead{} % clear all header fields
|
||||
\fancyhead[LO]{\color{gray}\fontUbuntu }
|
||||
\fancyhead[RO]{\color{gray}\fontUbuntu Superlight Personal Carrier}
|
||||
\fancyfoot{} % clear all footer fields
|
||||
\fancyfoot[LO]{\color{gray}\fontUbuntu E.L.F. van Reenen, C. Tan, T Snijders, M. Kappert en T. Braam}
|
||||
\fancyfoot[CO]{\color{gray}\fontUbuntu }
|
||||
\fancyfoot[RO]{\color{gray}\fontUbuntu \thepage}
|
||||
|
||||
|
||||
|
||||
|
||||
\newpage
|
||||
|
||||
\section{Unit Testen Stabilisatie}\label{unit-testen-stabilisatie}
|
||||
|
||||
\subsection{Voedingen}\label{voedingen}
|
||||
|
||||
\subsubsection{Benodigdheden}\label{benodigdheden}
|
||||
|
||||
\begin{itemize}
|
||||
\tightlist
|
||||
\item
|
||||
12V voeding
|
||||
\end{itemize}
|
||||
|
||||
\subsubsection{Procedure}\label{procedure}
|
||||
|
||||
\begin{enumerate}
|
||||
\def\labelenumi{\arabic{enumi}.}
|
||||
\tightlist
|
||||
\item
|
||||
snel de voeding in op 12V met een stroom berensing van 50 mA
|
||||
\item
|
||||
sluit de 12V voeding aan op de 12V en GND ingnangen op de driver
|
||||
\item
|
||||
meet de uitgangen van de twee voedingen, vul de tabel hieronder in
|
||||
\end{enumerate}
|
||||
|
||||
\begin{longtable}[]{@{}lrr@{}}
|
||||
\toprule\noalign{}
|
||||
& \(5V\) & \(12V\) \\
|
||||
\midrule\noalign{}
|
||||
\endhead
|
||||
\bottomrule\noalign{}
|
||||
\endlastfoot
|
||||
minimaal & \(4.5V\) & \(11.5V\) \\
|
||||
maximaal & \(5.5V\) & \(12.5V\) \\
|
||||
gemeeten & & \\
|
||||
\end{longtable}
|
||||
|
||||
Geslaagd:
|
||||
|
||||
opmergingen:
|
||||
|
||||
\subsection{Microcontroller}\label{microcontroller}
|
||||
|
||||
\subsubsection{Benodigdheden}\label{benodigdheden-1}
|
||||
|
||||
\begin{itemize}
|
||||
\tightlist
|
||||
\item
|
||||
12V voeding als de voedingen werken, anders met een 5V en 3.3v voeding
|
||||
\item
|
||||
computer met Arduino IDE geinstaleerd
|
||||
\item
|
||||
USB B kabel naar de computer
|
||||
\item
|
||||
ledje met bijhoren de weerstand voor 3.3V
|
||||
\end{itemize}
|
||||
|
||||
\subsubsection{Procedure}\label{procedure-1}
|
||||
|
||||
\begin{enumerate}
|
||||
\def\labelenumi{\arabic{enumi}.}
|
||||
\tightlist
|
||||
\item
|
||||
sluit een ledje aan op een van de GPIO pinnen
|
||||
\item
|
||||
snel de voeding in op 12V met een stroom berensing van 150 mA
|
||||
\item
|
||||
sluit de 12V voeding aan op de 12V en GND ingnangen op de driver
|
||||
\item
|
||||
sluit de USB kabel aan op de computer (dit is veilig omdat de USB
|
||||
alleen verbonden is met ground, de V+ is floating)
|
||||
\item
|
||||
upload een blinky voorbeeld progamma met de GPIO ingesteld van de led
|
||||
\item
|
||||
bekijk of het lidje knipperd
|
||||
\end{enumerate}
|
||||
|
||||
Geslaagd:
|
||||
|
||||
opmergingen:
|
||||
|
||||
\subsection{Half-brug}\label{half-brug}
|
||||
|
||||
\subsubsection{Benodigdheden}\label{benodigdheden-2}
|
||||
|
||||
\begin{itemize}
|
||||
\tightlist
|
||||
\item
|
||||
als de microcontoller werkt:
|
||||
|
||||
\begin{itemize}
|
||||
\tightlist
|
||||
\item
|
||||
12V voeding als de voedingen werken, anders met een 5V en 3.3v
|
||||
voeding
|
||||
\item
|
||||
30V voor V Motor
|
||||
\item
|
||||
computer met Arduino IDE geinstaleerd
|
||||
\item
|
||||
USB B kabel naar de computer
|
||||
\item
|
||||
ocsiloscoop
|
||||
\end{itemize}
|
||||
\item
|
||||
zo niet:
|
||||
|
||||
\begin{itemize}
|
||||
\tightlist
|
||||
\item
|
||||
10V voor V motor
|
||||
\item
|
||||
signaal generator met twee kanalen
|
||||
\item
|
||||
ocsioscoop
|
||||
\end{itemize}
|
||||
\end{itemize}
|
||||
|
||||
\subsubsection{procedure}\label{procedure-2}
|
||||
|
||||
\begin{enumerate}
|
||||
\def\labelenumi{\arabic{enumi}.}
|
||||
\tightlist
|
||||
\item
|
||||
sluit de ociloscoop aan op een van de uitgangen van de drijver (er
|
||||
komt 30V op te staan, beruik de juiste probe; geen juiste probe bij de
|
||||
hand, zelt de voeding voor V motor wa lager)
|
||||
\item
|
||||
snel de voeding in op 12V met een stroom berensing van 150 mA
|
||||
\item
|
||||
sluit de 12V voeding aan op de 12V en GND ingnangen op de driver
|
||||
\item
|
||||
sluit de USB kabel aan op de computer (dit is veilig omdat de USB
|
||||
alleen verbonden is met ground, de V+ is floating)
|
||||
\item
|
||||
upload een test progamma die de PWM aansuurt voor de FET's
|
||||
|
||||
\begin{itemize}
|
||||
\tightlist
|
||||
\item
|
||||
de PWM per half bridge zijn aangesloten op de a en b uitganen van 1
|
||||
timer per half brug. zorg dat een van de uitput geinverteerd is en
|
||||
de twee vergeleijk waardes zo zijn zodat er een korte dead time is.
|
||||
ze mogen nooit tegerlijk hoog zijn!
|
||||
\end{itemize}
|
||||
\item
|
||||
bekijk het signaal op de osciloscoop
|
||||
\item
|
||||
herhaal de test voor alle drie de half bruggen
|
||||
\end{enumerate}
|
||||
|
||||
resultaat:
|
||||
|
||||
\begin{itemize}
|
||||
\tightlist
|
||||
\item
|
||||
brug a:
|
||||
\item
|
||||
brug b:
|
||||
\item
|
||||
brug c:
|
||||
\end{itemize}
|
||||
|
||||
opmerkingen:
|
||||
|
||||
\subsection{IMU}\label{imu}
|
||||
|
||||
\subsubsection{benodigdheden}\label{benodigdheden-3}
|
||||
|
||||
\begin{itemize}
|
||||
\tightlist
|
||||
\item
|
||||
een microcontroller met I2C (kan de motoro driver zelf zijn)
|
||||
\item
|
||||
computer met Arduino IDE geinstaleerd
|
||||
\item
|
||||
USB B kabel naar de computer
|
||||
\end{itemize}
|
||||
|
||||
\subsubsection{procedure}\label{procedure-3}
|
||||
|
||||
\begin{enumerate}
|
||||
\def\labelenumi{\arabic{enumi}.}
|
||||
\tightlist
|
||||
\item
|
||||
sluit de IMU aan op de motor driver
|
||||
\item
|
||||
snel de voeding in op 12V met een stroom berensing van 150 mA
|
||||
\item
|
||||
sluit de 12V voeding aan op de 12V en GND ingnangen op de driver
|
||||
\item
|
||||
sluit de USB kabel aan op de computer (dit is veilig omdat de USB
|
||||
alleen verbonden is met ground, de V+ is floating)
|
||||
\item
|
||||
upload een blinky voorbeeld progamma met de GPIO ingesteld van de led
|
||||
\item
|
||||
bekijk de serial plotter terwel je de IMU draait.
|
||||
\end{enumerate}
|
||||
|
||||
Geslaagd:
|
||||
|
||||
opmergingen:
|
||||
|
||||
\subsection{stroom meting}\label{stroom-meting}
|
||||
|
||||
\subsubsection{benodigdheden}\label{benodigdheden-4}
|
||||
|
||||
\begin{itemize}
|
||||
\tightlist
|
||||
\item
|
||||
12V voeding (of 5V bij beperking van beschikbaare voedingen)
|
||||
\item
|
||||
voeding die 50A kan leveren (of zoveel mogenlijk) voor V motor
|
||||
\item
|
||||
bij voorkeur een load die de \(50A_{DC}\) kan op nemen, ander kan de
|
||||
uitgang korgesloten worden als de voeding dat toestaat.
|
||||
\item
|
||||
multimeter
|
||||
\item
|
||||
computer met Arduino IDE geinstaleerd
|
||||
\item
|
||||
USB B kabel naar de computer
|
||||
\end{itemize}
|
||||
|
||||
\subsubsection{procedure}\label{procedure-4}
|
||||
|
||||
\begin{enumerate}
|
||||
\def\labelenumi{\arabic{enumi}.}
|
||||
\tightlist
|
||||
\item
|
||||
sluit de load aan op deen van de uitgangen van de motor driver
|
||||
\item
|
||||
snel de voeding in op 12V met een stroom berensing van 150 mA
|
||||
\item
|
||||
sluit de 12V voeding aan op de 12V en GND ingnangen op de driver
|
||||
\item
|
||||
sluit de USB kabel aan op de computer (dit is veilig omdat de USB
|
||||
alleen verbonden is met ground, de V+ is floating)
|
||||
\item
|
||||
upload een programma die alle high side fet's dicht zet en de low side
|
||||
fet's open
|
||||
\item
|
||||
sluit de voeding voor V motor aan
|
||||
\item
|
||||
meet uitgang van de stroom meeting
|
||||
\item
|
||||
zet de v motor voeding uit en verlaats de load naar een andere uitgang
|
||||
\item
|
||||
zet de voeding weer aan en meet de stroom meting
|
||||
\item
|
||||
herhaal dit voor de laaste uitgang
|
||||
\end{enumerate}
|
||||
|
||||
TODO: add meet table
|
||||
|
||||
Geslaagd:
|
||||
|
||||
opmergingen:
|
||||
|
||||
\subsection{encoder}\label{encoder}
|
||||
|
||||
\subsubsection{benodigdheden}\label{benodigdheden-5}
|
||||
|
||||
\begin{itemize}
|
||||
\tightlist
|
||||
\item
|
||||
een microcontroller met I2C (kan de motoro driver zelf zijn)
|
||||
\item
|
||||
computer met Arduino IDE geinstaleerd
|
||||
\item
|
||||
USB B kabel naar de computer
|
||||
\end{itemize}
|
||||
|
||||
\subsubsection{procedure}\label{procedure-5}
|
||||
|
||||
\begin{enumerate}
|
||||
\def\labelenumi{\arabic{enumi}.}
|
||||
\tightlist
|
||||
\item
|
||||
sluit de Encoder aan op de motor driver
|
||||
\item
|
||||
snel de voeding in op 12V met een stroom berensing van 150 mA
|
||||
\item
|
||||
sluit de 12V voeding aan op de 12V en GND ingnangen op de driver
|
||||
\item
|
||||
sluit de USB kabel aan op de computer (dit is veilig omdat de USB
|
||||
alleen verbonden is met ground, de V+ is floating)
|
||||
\item
|
||||
upload een voorbeeld progamma voor de encoder.
|
||||
\item
|
||||
bekijk de serial plotter terwel je de magneer van de encoder draait
|
||||
\end{enumerate}
|
||||
|
||||
Geslaagd:
|
||||
|
||||
opmergingen:
|
||||
|
||||
|
||||
|
||||
|
||||
\end{document}
|
||||
122
makefile
@@ -1,5 +1,8 @@
|
||||
|
||||
all: prepare pdf/plan_van_aanpak.pdf pdf/plan_van_aanpak.booklet.pdf
|
||||
all: all_booklets all_docduments
|
||||
|
||||
all_docduments: prepare pdf/plan_van_aanpak.pdf pdf/detailontwerp_stabilisatie.pdf pdf/detailontwerp_stuursysteem.pdf pdf/unittest_stabilisatie.pdf pdf/softwareontwerp_stabilisatie.pdf pdf/projectdocument.pdf
|
||||
all_booklets: prepare pdf/plan_van_aanpak.booklet.pdf pdf/detailontwerp_stabilisatie.booklet.pdf pdf/detailontwerp_stuursysteem.booklet.pdf pdf/unittest_stabilisatie.booklet.pdf pdf/softwareontwerp_stabilisatie.booklet.pdf pdf/projectdocument.booklet.pdf
|
||||
|
||||
prepare:
|
||||
mkdir -p latex pdf
|
||||
@@ -7,9 +10,12 @@ prepare:
|
||||
clean:
|
||||
rm -r build
|
||||
|
||||
clean_all:
|
||||
rm -r build latex pdf
|
||||
|
||||
install_arch:
|
||||
mkdir -p build/install
|
||||
pacman -S --noconfirm --needed curl unzip texlive-basic texlive-langeuropean pandoc
|
||||
pacman -Sy --noconfirm --needed curl unzip texlive-basic texlive-langeuropean pandoc
|
||||
|
||||
test -e build/install/ubuntu.zip || curl https://assets.ubuntu.com/v1/0cef8205-ubuntu-font-family-0.83.zip -o build/install/ubuntu.zip
|
||||
test -d build/install/ubuntu && rm -r build/install/ubuntu || echo
|
||||
@@ -61,6 +67,34 @@ latex/plan_van_aanpak.latex: converters/mdToLatex.sh converters/template.latex m
|
||||
mkdir -p build/plan_van_aanpak
|
||||
bash converters/mdToLatex.sh markdown/plan_van_aanpak.md latex/plan_van_aanpak.latex
|
||||
|
||||
latex/pakket_van_eisen.latex: converters/mdToLatex.sh converters/template.latex markdown/pakket_van_eisen.md
|
||||
mkdir -p build/pakket_van_eisen
|
||||
bash converters/mdToLatex.sh markdown/pakket_van_eisen.md latex/pakket_van_eisen.latex
|
||||
|
||||
latex/detailontwerp_stabilisatie.latex: converters/mdToLatex.sh converters/template.latex markdown/detailontwerp_stabilisatie.md
|
||||
mkdir -p build/detailontwerp_stabilisatie
|
||||
bash converters/mdToLatex.sh markdown/detailontwerp_stabilisatie.md latex/detailontwerp_stabilisatie.latex
|
||||
|
||||
latex/detailontwerp_stuursysteem.latex: converters/mdToLatex.sh converters/template.latex markdown/detailontwerp_stuursysteem.md
|
||||
mkdir -p build/detailontwerp_stuursysteem
|
||||
bash converters/mdToLatex.sh markdown/detailontwerp_stuursysteem.md latex/detailontwerp_stuursysteem.latex
|
||||
|
||||
latex/unittest_stabilisatie.latex: converters/mdToLatex.sh converters/template.latex markdown/unittest_stabilisatie.md
|
||||
mkdir -p build/unittest_stabilisatie
|
||||
bash converters/mdToLatex.sh markdown/unittest_stabilisatie.md latex/unittest_stabilisatie.latex
|
||||
|
||||
# latex/unittest_stuursysteem.latex: converters/mdToLatex.sh converters/template.latex markdown/unittest_stuursysteem.md
|
||||
# mkdir -p build/unittest_stuursysteem
|
||||
# bash converters/mdToLatex.sh markdown/unittest_stuursysteem.md latex/unittest_stuursysteem.latex
|
||||
|
||||
latex/softwareontwerp_stabilisatie.latex: converters/mdToLatex.sh converters/template.latex markdown/softwareontwerp_stabilisatie.md
|
||||
mkdir -p build/softwareontwerp_stabilisatie
|
||||
bash converters/mdToLatex.sh markdown/softwareontwerp_stabilisatie.md latex/softwareontwerp_stabilisatie.latex
|
||||
|
||||
latex/projectdocument.latex: converters/mdToLatex.sh converters/template.latex markdown/projectdocument.md
|
||||
mkdir -p build/projectdocument
|
||||
bash converters/mdToLatex.sh markdown/projectdocument.md latex/projectdocument.latex
|
||||
|
||||
# =======================================
|
||||
# === pdf generation ====================
|
||||
# =======================================
|
||||
@@ -76,3 +110,87 @@ pdf/plan_van_aanpak.booklet.pdf: converters/bookletify.latex pdf/plan_van_aanpak
|
||||
sed -e 's|?pdf?|../../pdf/plan_van_aanpak.pdf|' converters/bookletify.latex >build/plan_van_aanpak.booklet/bookletify.latex
|
||||
pdflatex -interaction=nonstopmode -output-directory="build/plan_van_aanpak.booklet" "build/plan_van_aanpak.booklet/bookletify.latex"
|
||||
mv build/plan_van_aanpak.booklet/bookletify.pdf pdf/plan_van_aanpak.booklet.pdf
|
||||
|
||||
pdf/pakket_van_eisen.pdf: latex/pakket_van_eisen.latex
|
||||
cd build/pakket_van_eisen && xelatex ../../latex/pakket_van_eisen.latex
|
||||
cd build/pakket_van_eisen && xelatex ../../latex/pakket_van_eisen.latex
|
||||
cd build/pakket_van_eisen && xelatex ../../latex/pakket_van_eisen.latex
|
||||
mv build/pakket_van_eisen/pakket_van_eisen.pdf pdf/pakket_van_eisen.pdf
|
||||
|
||||
pdf/pakket_van_eisen.booklet.pdf: converters/bookletify.latex pdf/pakket_van_eisen.pdf
|
||||
mkdir -p build/pakket_van_eisen.booklet
|
||||
sed -e 's|?pdf?|../../pdf/pakket_van_eisen.pdf|' converters/bookletify.latex >build/pakket_van_eisen.booklet/bookletify.latex
|
||||
pdflatex -interaction=nonstopmode -output-directory="build/pakket_van_eisen.booklet" "build/pakket_van_eisen.booklet/bookletify.latex"
|
||||
mv build/pakket_van_eisen.booklet/bookletify.pdf pdf/pakket_van_eisen.booklet.pdf
|
||||
|
||||
pdf/detailontwerp_stabilisatie.pdf: latex/detailontwerp_stabilisatie.latex
|
||||
cd build/detailontwerp_stabilisatie && xelatex ../../latex/detailontwerp_stabilisatie.latex
|
||||
cd build/detailontwerp_stabilisatie && xelatex ../../latex/detailontwerp_stabilisatie.latex
|
||||
cd build/detailontwerp_stabilisatie && xelatex ../../latex/detailontwerp_stabilisatie.latex
|
||||
mv build/detailontwerp_stabilisatie/detailontwerp_stabilisatie.pdf pdf/detailontwerp_stabilisatie.pdf
|
||||
|
||||
pdf/detailontwerp_stabilisatie.booklet.pdf: converters/bookletify.latex pdf/detailontwerp_stabilisatie.pdf
|
||||
mkdir -p build/detailontwerp_stabilisatie.booklet
|
||||
sed -e 's|?pdf?|../../pdf/detailontwerp_stabilisatie.pdf|' converters/bookletify.latex >build/detailontwerp_stabilisatie.booklet/bookletify.latex
|
||||
pdflatex -interaction=nonstopmode -output-directory="build/detailontwerp_stabilisatie.booklet" "build/detailontwerp_stabilisatie.booklet/bookletify.latex"
|
||||
mv build/detailontwerp_stabilisatie.booklet/bookletify.pdf pdf/detailontwerp_stabilisatie.booklet.pdf
|
||||
|
||||
pdf/detailontwerp_stuursysteem.pdf: latex/detailontwerp_stuursysteem.latex
|
||||
cd build/detailontwerp_stuursysteem && xelatex ../../latex/detailontwerp_stuursysteem.latex
|
||||
cd build/detailontwerp_stuursysteem && xelatex ../../latex/detailontwerp_stuursysteem.latex
|
||||
cd build/detailontwerp_stuursysteem && xelatex ../../latex/detailontwerp_stuursysteem.latex
|
||||
mv build/detailontwerp_stuursysteem/detailontwerp_stuursysteem.pdf pdf/detailontwerp_stuursysteem.pdf
|
||||
|
||||
pdf/detailontwerp_stuursysteem.booklet.pdf: converters/bookletify.latex pdf/detailontwerp_stuursysteem.pdf
|
||||
mkdir -p build/detailontwerp_stuursysteem.booklet
|
||||
sed -e 's|?pdf?|../../pdf/detailontwerp_stuursysteem.pdf|' converters/bookletify.latex >build/detailontwerp_stuursysteem.booklet/bookletify.latex
|
||||
pdflatex -interaction=nonstopmode -output-directory="build/detailontwerp_stuursysteem.booklet" "build/detailontwerp_stuursysteem.booklet/bookletify.latex"
|
||||
mv build/detailontwerp_stuursysteem.booklet/bookletify.pdf pdf/detailontwerp_stuursysteem.booklet.pdf
|
||||
|
||||
pdf/unittest_stabilisatie.pdf: latex/unittest_stabilisatie.latex
|
||||
cd build/unittest_stabilisatie && xelatex ../../latex/unittest_stabilisatie.latex
|
||||
cd build/unittest_stabilisatie && xelatex ../../latex/unittest_stabilisatie.latex
|
||||
cd build/unittest_stabilisatie && xelatex ../../latex/unittest_stabilisatie.latex
|
||||
mv build/unittest_stabilisatie/unittest_stabilisatie.pdf pdf/unittest_stabilisatie.pdf
|
||||
|
||||
pdf/unittest_stabilisatie.booklet.pdf: converters/bookletify.latex pdf/unittest_stabilisatie.pdf
|
||||
mkdir -p build/unittest_stabilisatie.booklet
|
||||
sed -e 's|?pdf?|../../pdf/unittest_stabilisatie.pdf|' converters/bookletify.latex >build/unittest_stabilisatie.booklet/bookletify.latex
|
||||
pdflatex -interaction=nonstopmode -output-directory="build/unittest_stabilisatie.booklet" "build/unittest_stabilisatie.booklet/bookletify.latex"
|
||||
mv build/unittest_stabilisatie.booklet/bookletify.pdf pdf/unittest_stabilisatie.booklet.pdf
|
||||
|
||||
# pdf/unittest_stuursysteem.pdf: latex/unittest_stuursysteem.latex
|
||||
# cd build/unittest_stuursysteem && xelatex ../../latex/unittest_stuursysteem.latex
|
||||
# cd build/unittest_stuursysteem && xelatex ../../latex/unittest_stuursysteem.latex
|
||||
# cd build/unittest_stuursysteem && xelatex ../../latex/unittest_stuursysteem.latex
|
||||
# mv build/unittest_stuursysteem/unittest_stuursysteem.pdf pdf/unittest_stuursysteem.pdf
|
||||
|
||||
# pdf/unittest_stuursysteem.booklet.pdf: converters/bookletify.latex pdf/unittest_stuursysteem.pdf
|
||||
# mkdir -p build/unittest_stuursysteem.booklet
|
||||
# sed -e 's|?pdf?|../../pdf/unittest_stuursysteem.pdf|' converters/bookletify.latex >build/unittest_stuursysteem.booklet/bookletify.latex
|
||||
# pdflatex -interaction=nonstopmode -output-directory="build/unittest_stuursysteem.booklet" "build/unittest_stuursysteem.booklet/bookletify.latex"
|
||||
# mv build/unittest_stuursysteem.booklet/bookletify.pdf pdf/unittest_stuursysteem.booklet.pdf
|
||||
|
||||
pdf/softwareontwerp_stabilisatie.pdf: latex/softwareontwerp_stabilisatie.latex
|
||||
cd build/softwareontwerp_stabilisatie && xelatex ../../latex/softwareontwerp_stabilisatie.latex
|
||||
cd build/softwareontwerp_stabilisatie && xelatex ../../latex/softwareontwerp_stabilisatie.latex
|
||||
cd build/softwareontwerp_stabilisatie && xelatex ../../latex/softwareontwerp_stabilisatie.latex
|
||||
mv build/softwareontwerp_stabilisatie/softwareontwerp_stabilisatie.pdf pdf/softwareontwerp_stabilisatie.pdf
|
||||
|
||||
pdf/softwareontwerp_stabilisatie.booklet.pdf: converters/bookletify.latex pdf/softwareontwerp_stabilisatie.pdf
|
||||
mkdir -p build/softwareontwerp_stabilisatie.booklet
|
||||
sed -e 's|?pdf?|../../pdf/softwareontwerp_stabilisatie.pdf|' converters/bookletify.latex >build/softwareontwerp_stabilisatie.booklet/bookletify.latex
|
||||
pdflatex -interaction=nonstopmode -output-directory="build/softwareontwerp_stabilisatie.booklet" "build/softwareontwerp_stabilisatie.booklet/bookletify.latex"
|
||||
mv build/softwareontwerp_stabilisatie.booklet/bookletify.pdf pdf/softwareontwerp_stabilisatie.booklet.pdf
|
||||
|
||||
pdf/projectdocument.pdf: latex/projectdocument.latex
|
||||
cd build/projectdocument && xelatex ../../latex/projectdocument.latex
|
||||
cd build/projectdocument && xelatex ../../latex/projectdocument.latex
|
||||
cd build/projectdocument && xelatex ../../latex/projectdocument.latex
|
||||
mv build/projectdocument/projectdocument.pdf pdf/projectdocument.pdf
|
||||
|
||||
pdf/projectdocument.booklet.pdf: converters/bookletify.latex pdf/projectdocument.pdf
|
||||
mkdir -p build/projectdocument.booklet
|
||||
sed -e 's|?pdf?|../../pdf/projectdocument.pdf|' converters/bookletify.latex >build/projectdocument.booklet/bookletify.latex
|
||||
pdflatex -interaction=nonstopmode -output-directory="build/projectdocument.booklet" "build/projectdocument.booklet/bookletify.latex"
|
||||
mv build/projectdocument.booklet/bookletify.pdf pdf/projectdocument.booklet.pdf
|
||||
|
||||
47
markdown/competenties.md
Normal file
@@ -0,0 +1,47 @@
|
||||
---
|
||||
id: srDK71ryTui4ulsUVqWN5A
|
||||
path: /elektro/hr/pee51_spc/competentieVerandwoording
|
||||
tags: kladjes, elektro, elektro/hr, elektro/hr/pee51
|
||||
---
|
||||
|
||||
[parent](/tPb3Up1fQEuZ86yrJSkYRQ)
|
||||
|
||||
# Competentie verantwoording
|
||||
|
||||
## Analyseren (8)
|
||||
|
||||
Aan het begin hebben we goed gekeken naar eisen die er waren voor de vorige groep. Hierna hebben we samen met de opdrachtgever gezeten om te kijken wat de verschillen zijn voor dit jaar. Op basis van deze vergadering, en de eisen van de vorige groep, had ik het eerste concept voor het PvE gemaakt. Dit Het format dat ik het had gemaakt waardeerde de Automotive mensen onder ons niet, ze vonden het niet overzichtelijk. Die moesten het in een MS Exel doen vanuit hun opleiding, maar daar waren wij van Elektrotechniek het niet mee eens. Het is lastig om onderbowing van de eisen er bij te zetten en om er een ondertekenbaar en niet-bewerkbaar bestand van de maken (een PDF). Uieidelijk heb ik mijn format aangehouden en heeft uit mijn hoofd Chris deze vertaalt naar een Exel bestand.
|
||||
|
||||
Het eerste conept dat ik had gamaakt hebben we samen wat aangevult en verbeterd en vervolgens hetzelfde met de opdrachtgever.
|
||||
|
||||
Ook heb ik de analyse gedaan voor wat nodig is voor mijn unit, de motordriver voor de stabalisatie.
|
||||
|
||||
## Ontwerpen (8)
|
||||
|
||||
Het was eerst de bedoeling dat ik samen met Gryvon het ontwerp voor de motrodriver te maken, maar die is gestopt met het project voor dat er aan begonnen is. Dus ik heb het ontwerp alleen gedaan. Chirs, de enige andere van elektrotechniek, heeft niet veel ervaring van het ontwerpen van motordrivers, dus ik dacht dat het uitleggen hoe het moet meer tijd kost dan het zelf doen.
|
||||
|
||||
## Realiseren (6)
|
||||
|
||||
De motordriver heb ik gesoldeerd in het SMD lab op Accademiplein, en getest eerst op Accademiplein voor te tesen of de hardware werkt en later op het RDM met een motor aangesloten de software en intergratie te testen.
|
||||
|
||||
## Beheren (6)
|
||||
|
||||
Het detailontwerp heb ik geschreven, ook heb ik een resource map gemaakt die in software gebruikt kan worden dat beschrijft wat er op welke pin is aangesloten.
|
||||
|
||||
De Software is om moment van schrijven nog niet af, hier wordt nog verder aangewerkent komende weeken. Hier wordt ook documentatie voor geschreven.
|
||||
|
||||
## Managen (6)
|
||||
|
||||
Eleke week hebben we op donderdag gewerkt en vergaderd op het RDM. Hier hielden we eiders voordgang uptodate, en werdt ook regelmatig samen na gedacht over de uitdagingen waar tegenaangelopen werdt.
|
||||
|
||||
## Adviseren (6)
|
||||
|
||||
Adviesen zoals wat voor accu of motor er nodig is voor de stabilisatie is gegeven in het detaiontwerp. Er komt nog een advies over hoe de test omstelling ingezet kan worden in het voertuig, dit is nog niet gegeven om dat ik hier nog acctief aan werkt en dus nog niet weet wat er exact nodig is om dit te doen.
|
||||
|
||||
## Onderzoeken (6)
|
||||
|
||||
ik heb onderzocht hoe de meeste kracht uit een BLDC motor gehaaldt kan worden. Dit kwam heel snel neer op hoe FOC werkt, en hoe dit het best hier geimplementeerd kan worden.
|
||||
|
||||
## professionaliseren (6)
|
||||
|
||||
Er is elke week een presentatie gehouden voor de opdrachtgever en Automotive docenten.
|
||||
373
markdown/detailontwerp_stabilisatie.md
Normal file
@@ -0,0 +1,373 @@
|
||||
---
|
||||
tags: kladjes, elektro, elektro/hr, elektro/hr/pee51
|
||||
---
|
||||
|
||||
[parent](/tPb3Up1fQEuZ86yrJSkYRQ)
|
||||
|
||||
# Detailontwerp Stabilisatie
|
||||
|
||||
[toc]
|
||||
|
||||
## Inleiding
|
||||
|
||||
De SPC^[Superlight Personal Carrier] is een twee wielig concept eenpersoons voertuig. Zonder actieve stabilisatie gaat deze omvallen, hiervoor is een reactie wiel ontworpen. Het aansturen van de motor voor dit wiel is lastig, de volledige kracht moet gehaald worden vanaf stilstand. Dit is alleen mogelijk met FOC^[Field oriented Controll]. Er zijn niet veel motor driver op de markt voor het vermogen (4,5 KW, 45 Nm), hierom is er een op maat gemaakte motor driver ontworpen.
|
||||
|
||||
## Analyse
|
||||
|
||||
Tijn Stijders (student Automotive engineer) heeft de benodigde kracht van $45 Nm$ op een maximumsnelheid van $1000 rpm$, dit is $4.5 kW$ berekent voor dit voertuig. Deze berekening is gebaseerd op inschattingen van het gewicht van het voertuig, maar is nauwkeurig genoeg om te gebruiken.
|
||||
|
||||
### Motor Keuze
|
||||
|
||||
Het is voor ons niet toegestaan om boven de $50 V$ te testen op de RDM wegens veiligheid. Er zijn erg weinig motoren beschikbaar die onder deze spanning aan de eisen voldoet. Hierom wordt er niet op volledig vermogen getest in dit project, om meer keuze vrijheid te krijgen voor een geschikte motor.
|
||||
|
||||
De volgende motor is gekozen:
|
||||
|
||||
[referentie BLDC-motor](https://nl.aliexpress.com/item/1005006301690150.html?spm=a2g0o.productlist.main.2.6673ifiZifiZQm&algo_pvid=d6292651-bb7c-46b1-a220-6690a13ff967&algo_exp_id=d6292651-bb7c-46b1-a220-6690a13ff967-1&pdp_ext_f=%7B%22order%22%3A%2214%22%2C%22eval%22%3A%221%22%7D&pdp_npi=4%40dis%21EUR%21168.69%21168.69%21%21%211350.60%211350.60%21%402103847817496360886601361e6a7e%2112000036679171853%21sea%21NL%210%21ABX&curPageLogUid=wQDO26xezkrq&utparam-url=scene%3Asearch%7Cquery_from%3A)
|
||||
|
||||
De gegeven specificatie zijn:
|
||||
|
||||
| | |
|
||||
|---|---|
|
||||
| maximale spanning | 60V |
|
||||
| nominaal vermogen | 3000 W |
|
||||
| maximaal vermogen | 6000w |
|
||||
| piek vermogen | 7000w-8000W |
|
||||
| onbelaste snelheid | 3500 rpm |
|
||||
| maximaal rendement | 90% |
|
||||
| maximaal koppel | 10 Nm |
|
||||
| piekkoppel | 30 Nm |
|
||||
| nettogewicht | 4,5 kg |
|
||||
| max. stroombegrenzing | 150A |
|
||||
|
||||
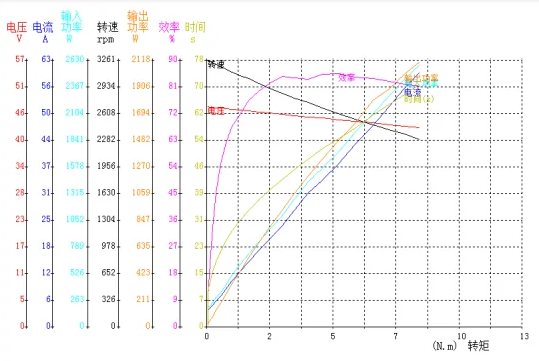
|
||||
|
||||
| | $U$ (V) | $I$ (A) | $P_{in}$ (W) | rpm | koppel (N.m) | $P_{out}$ (W) | efficiëntie (%) | tijd (s) |
|
||||
|----------|-------|-------|-------|------|-----|-------|-----|---|
|
||||
| onbelast | 47.49 | 3.666 | 174.1 | 3264 | 0.03 | 11.1 | 6.4 | 1 |
|
||||
| test eindpunt^[of wat er ook bedoeld wordt met "测试结束点"] | 42.99 | 60.35 | 2594 | 2294 | 8.77 | 2108 | 81.3 | 71 |
|
||||
| beoordeelde punten^[of wat er ook bedoeld wordt met "額定点"] | 44.03 | 47.71 | 2101 | 2471 | 6.82 | 1800 | 84.1 | 62 |
|
||||
| max. koppel | 42.99 | 60.35 | 2594 | 2294 | 8.77 | 2108 | 81.3 | 71 |
|
||||
| max. $P_{out}$ | 42.99 | 60.35 | 2594 | 2294 | 8.77 | 2108 | 81.3 | 71 |
|
||||
| max. efficiëntie | 44.72 | 38.53 | 1723 | 2605 | 5.41 | 1476 | 85.7 | 55 |
|
||||
|
||||
| 编号(No. ) | 电压 (V) | 电流 (A) | 输入功率 (W) | 转速 (rpm) | 转矩 (Nm) | 输出功率 (W) | 效率 (%) | 时间 (s) |
|
||||
|----|-------|-------|-------|------|------|-------|------|----|
|
||||
| 1 | 47.49 | 3.666 | 174.1 | 3264 | 0.03 | 11.1 | 6.4 | 1 |
|
||||
| 2 | 47.5 | 3.635 | 172.6 | 3262 | 0.03 | 11.14 | 6.5 | 4 |
|
||||
| 3 | 47.5 | 3.684 | 175 | 3259 | 0.03 | 11.44 | 6.5 | 7 |
|
||||
| 4 | 47.48 | 3.846 | 182.6 | 3256 | 0.05 | 18.52 | 10.1 | 10 |
|
||||
| 5 | 47.44 | 4.244 | 201.3 | 3246 | 0.12 | 42.5 | 21.1 | 13 |
|
||||
| 6 | 47.39 | 5.001 | 237 | 3233 | 0.23 | 79.21 | 33.4 | 16 |
|
||||
| 7 | 47.31 | 5.93 | 280.5 | 3214 | 0.37 | 126.7 | 45.2 | 19 |
|
||||
| 8 | 47.21 | 7.09 | 334.7 | 3186 | 0.55 | 184.5 | 55.1 | 22 |
|
||||
| 9 | 47.1 | 8.719 | 410.7 | 3154 | 0.77 | 254.5 | 62.0 | 25 |
|
||||
| 10 | 46.95 | 10.76 | 505.3 | 3114 | 1.04 | 341.9 | 67.7 | 28 |
|
||||
| 11 | 46.78 | 13.04 | 610.3 | 3076 | 1.35 | 437.9 | 71.8 | 31 |
|
||||
| 12 | 46.6 | 15.34 | 715 | 3040 | 1.71 | 547.4 | 76.6 | 34 |
|
||||
| 13 | 46.38 | 17.9 | 830.3 | 2980 | 2.12 | 662.2 | 79.8 | 37 |
|
||||
| 14 | 46.14 | 20.68 | 954.7 | 2917 | 2.57 | 786.9 | 82.4 | 40 |
|
||||
| 15 | 45.88 | 23.75 | 1090 | 2859 | 3.08 | 922.6 | 84.6 | 43 |
|
||||
| 16 | 45.61 | 27.55 | 1256 | 2801 | 3.6 | 1057 | 84.2 | 46 |
|
||||
| 17 | 45.32 | 31.6 | 1432 | 2750 | 4.16 | 1198 | 83.7 | 49 |
|
||||
| 18 | 45.04 | 34.65 | 1561 | 2676 | 4.75 | 1331 | 85.3 | 52 |
|
||||
| 19 | 44.72 | 38.53 | 1723 | 2605 | 5.41 | 1476 | 85.7 | 55 |
|
||||
| 20 | 44.38 | 43.17 | 1916 | 2539 | 6.08 | 1617 | 84.4 | 58 |
|
||||
| 21 | 44.03 | 47.71 | 2101 | 2471 | 6.82 | 1800 | 84.1 | 62 |
|
||||
| 22 | 43.67 | 52.13 | 2277 | 2415 | 7.48 | 1892 | 83.1 | 65 |
|
||||
| 23 | 43.33 | 56.41 | 2444 | 2357 | 8.13 | 2006 | 82.1 | 68 |
|
||||
| 24 | 42.99 | 60.35 | 2594 | 2294 | 8.77 | 2108 | 81.3 | 71 |
|
||||
|
||||
Er missen wat gegevens om verder te kunnen. De hoeveelheid stroom bij krachten groter dan $8.77 Nm$ en hoelang de piek kracht volgehouden kan worden.
|
||||
|
||||
### koppel constante
|
||||
|
||||
Om de stroom bij grotere krachten te berekenen is de koppel constante nodig. Dit is de hoeveelheid koppel die per Ampère levert. In dit geval kan deze berekend worden met de volgende formule.
|
||||
|
||||
$$
|
||||
K_T = \frac{\tau}{I-I_{noload}}
|
||||
$$
|
||||
|
||||
$K_T$: koppel constante in Nm/A
|
||||
$\tau$: koppel in Nm
|
||||
$I$: de stroom nodig om de koppel te halen
|
||||
$I_{noload}$: de stroom die verbruikt wordt als de motor vrij draait
|
||||
|
||||
$\tau$ en $I$ is gegeven in de test data. De beste inschatting voor $I_{noload}$ is het gemiddelde van test 1, 2 en 3. Deze hebben allemaal $0.03Nm$ koppel, er is geen informatie hoe deze koppel gemeten is. Om te controleren of dit correct is is een plot gemaakt voor elke regel van de test data.
|
||||
|
||||
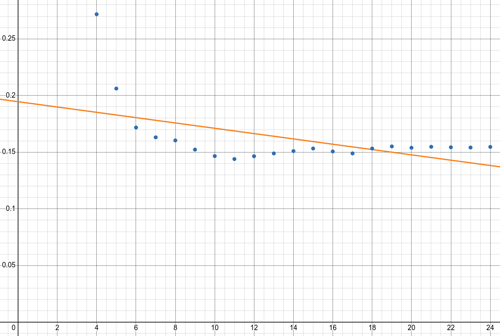
|
||||
|
||||
|
||||
x as: test nummer
|
||||
y as: koppel constante
|
||||
blauwe punten: berekende koppel constante vanuit de test data
|
||||
oranje lijn: regressie van de berekende koppel constante
|
||||
|
||||
In deze grafiek is een duidelijke curve te zien aan het begin te zien. Dit duidt er op dat $I_{noload}$ te hoog is. Dit kan verklaard worden als de meting is uitgevoerd wanneer de tegenmotor nog aangesloten was maar uitgeschakeld. De $0.03 Nm$ komt, als deze theorie correct is, waarschijnlijk van de lagers van de tegenmotor. Waarschijnlijk mist ook de weerstand van de lagers in de motor zelf.
|
||||
|
||||
Met $3.52 A$ voor $I_{noload}$ ziet de grafiek er als volgt uit.
|
||||
|
||||
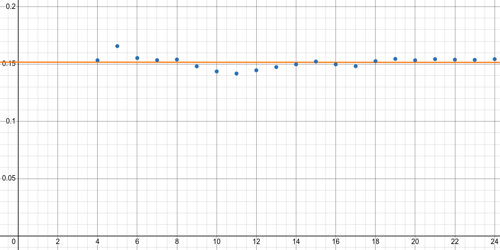
|
||||
|
||||
|
||||
Dit is waarschijnlijk dichter bij de werkelijke $I_{noload}$. Het is hier ook te zien dat de koppel constante ongeveer $0.15 Nm/A$ is.
|
||||
|
||||
### Snelheidsconstante en Weerstand Stator
|
||||
|
||||
De snelheidsconstante is het aantal rpm dat de motor draait zonder belasting per volt. Deze kan berekend worden met de volgende formule.
|
||||
|
||||
$$
|
||||
K_v = \frac{\omega}{U-U_{th}}
|
||||
$$
|
||||
|
||||
$K_v$: de snelheidsconstante in rpm/v
|
||||
$\omega$: de snelheid dat de motor draait in rpm
|
||||
$U$: de spanning
|
||||
$U_{th}$: de spanning waarop de motor start met draaien
|
||||
|
||||
Onbelast draait met $47.49V$ ($U$) draait de motor 3264 rpm ($\omega$). $U_{th}$ is niet gegeven, met de gegeven die er wel zijn is de beste methode met de volgende formules.
|
||||
|
||||
$$
|
||||
U=\frac{\omega}{K_v} + \frac{\tau}{K_T} R + U_{th}
|
||||
$$
|
||||
|
||||
$$
|
||||
I=\frac{\omega}{K_vR} + \frac{\tau}{K_T} + I_{noload}
|
||||
$$
|
||||
|
||||
$U$: de motor spanning
|
||||
$\omega$: de snelheid dat de motor draait in rpm
|
||||
$K_v$: de snelheidsconstante in rpm/v
|
||||
$\tau$: koppel in Nm
|
||||
$K_T$: koppel constante in Nm/A
|
||||
$R$: de weerstand van de stator
|
||||
$U_{th}$: de spanning waarop de motor start met draaien
|
||||
$I$: de stroom nodig om de koppel te halen
|
||||
$I_{noload}$: de stroom die verbruikt wordt als de motor vrij draait
|
||||
|
||||
Als $\omega = 0$ gelt $U = \frac{\tau}{K_T} R + U_{th}$ en $I = \frac{\tau}{K_T} + I_{noload} \Rightarrow IR = U = \frac{\tau}{K_T} R + I_{noload} R$ dus $U_{th} = R I_{noload}$
|
||||
|
||||
Hiermee kan de volgende formule opgesteld worden
|
||||
|
||||
$$
|
||||
U = \frac{\omega}{K_v} + \frac{\tau}{K_T} R + R I_{noload}
|
||||
$$
|
||||
|
||||
$$
|
||||
\Rightarrow RU=R\frac{\omega}{K_v} + R^2(\frac{\tau}{K_T} + I_{noload})
|
||||
$$
|
||||
|
||||
$$
|
||||
\Rightarrow \sqrt{\frac{U}{\frac{\omega}{K_v} (\frac{\tau}{K_T} + I_{noload})}} = R
|
||||
$$
|
||||
|
||||
Met de methode gebruikt voor het berekenen van $I_{noload}$ komen we op de waardes $K_v = 69rpm/V$, $R = 170m\Omega$ en $U_{th} = 598mV$. Hieronder is de grafiek van alle spannignserrors met deze waardes
|
||||
|
||||
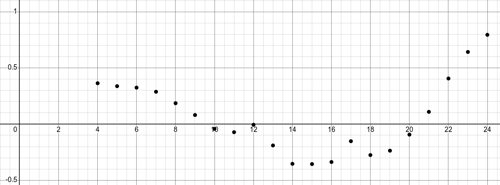
|
||||
|
||||
|
||||
x as: test nummer
|
||||
y as: spannigs error tussen test data en $U=\frac{\omega}{K_v} + \frac{\tau}{K_T} R + U_{th}$
|
||||
|
||||
|
||||
### Koppel Tijdens het Draaien
|
||||
|
||||
Om de koppel van $45 Nm$ te kunnen halen op $1000 rpm$ is een gearbox nodig. We hebben alles al berekend om de direct de benodigde spanning en stroom te krijgen van koppel en snelheid met de volgende formule.
|
||||
|
||||
$$
|
||||
U = \frac{\omega}{K_v} + \frac{\tau}{K_T} R + U_{th} = \frac{\omega}{69} + \frac{\tau}{0.15} \cdot 0.17 + 0.598
|
||||
$$
|
||||
|
||||
$$
|
||||
I = \frac{\tau}{K_T} + I_{noload} = \frac{\tau}{0.15} + 3.52
|
||||
$$
|
||||
|
||||
| gearbox | snelheid | koppel | spanning | stroom | vermogen | efficiëntie[^efficentie-berekening] |
|
||||
| ------- | --------:| -------:| --------:| -------:| --------:| ------:|
|
||||
| 1:1 | 1000 rpm | 45.0 Nm | 66.1 V | 303.5 A | 20060 W | 22.4 % |
|
||||
| 1:2 | 2000 rpm | 22.5 Nm | 55.1 V | 153.5 A | 8456 W | 53.2 % |
|
||||
| 1:3 | 3000 rpm | 15.0 Nm | 61.1 V | 103.5 A | 6323 W | 71.2 % |
|
||||
| 1:4 | 4000 rpm | 11.3 Nm | 71.3 V | 78.5 A | 5600 W | 80.4 % |
|
||||
| 1:5 | 5000 rpm | 9.0 Nm | 83.3 V | 63.5 A | 5289 W | 85.1 % |
|
||||
|
||||
[^efficentie-berekening]: op basis van 4.5 kW mechanisch vermogen dat berekend is door automotive studenten
|
||||
|
||||
Met een 1:4 gearbox kan een maximale snelheid van 875 rpm halen (de motor kan maximaal 3500 rpm draaien). Dit is iets onder de eisen, maar een betere motor hebben wij niet gevonden voor een redelijke prijs.
|
||||
|
||||
voor $3500rpm$ met $11.3 Nm$ is een spanning nodig van $64V$.
|
||||
|
||||
> Er is zat een grote fout in eerdere berekeningen. Terug regekent was dat voor 25 Nm i.p.v. 45 Nm. Dan is er maar ongeveer 45 A met de 1:4 gearbox nodig. De motor driver is dus ontworpen voor 50 A (inclusief een marge) i.p.v. de 80 A die het eigenlijk had moeten zijn. Volgende keer de berekeningen beter controleren.
|
||||
> Verder in dit document zal de $50 A$ gebruik worden
|
||||
|
||||
### Specificaties
|
||||
|
||||
- De drijver moet minimaal $72 V$ aan kunnen, met voorkeur van $120 V$ [^1]
|
||||
- de drijver moet minimaal $50 A$ continu kunnen leveren (wat eigenlijk $80 A$ had moeten zijn) [^1]
|
||||
- maakt gebruik van Field Orented Controll, om het volledige vermogen te kunnen halen vanaf stilstand.
|
||||
- De hoek van het voertuig moet gemeten worden.
|
||||
- Er is een regel loop tussen de hoek sensor en de kracht van de motor.
|
||||
- Er is een SPI-client connector waarmee verschillende instellingen ingesteld mee kan worden, waaronder het maximaal vermogen.
|
||||
|
||||
[^1]: Er wordt tot $50 V$ getest, deze waardes word het voor ontworpen, maar niet tot de limiet getest.
|
||||
|
||||
## Ontwerp
|
||||
|
||||
### Componenten
|
||||
|
||||
#### FET's
|
||||
|
||||
MOSFET's was de eerste waar naar gezocht is. Van bijna alle FET's is de maximale stroom in de datasheet is niet realistisch haalbaar, dit vereist veel koeling dat erg lastig is te realiseren. Dit maakt het vinden van een geschikte MOSFET lastig, de meeste kunnen het niet aan alleen. Het is mogelijk om meerde parallel te zetten, maar dit vereist goede thermisch beheer.
|
||||
|
||||
Een andere optie is GaNFET's, hier hebben we een fabrikant (Efficiënt Power Converters; EPC) gevonden die veel redelijkere maximale stroom geven. De EPC3207^[[https://epc-co.com/epc/products/gan-fets-and-ics/epc2307](https://epc-co.com/epc/products/gan-fets-and-ics/epc2307)] lijkt met meest geschikt voor dit project. Deze kan $62A$ aan volgens de datasheet, en verliest ongeveer $15W$ bij $50A$. Dit vermogen is goed te koelen met een koelblok.
|
||||
|
||||
#### Gate Driver
|
||||
|
||||
EPC geeft een lijst aan aangeraden gate drivers IC's^[[https://epc-co.com/epc/design-support/gan-first-time-right/drivers-and-controllers](https://epc-co.com/epc/design-support/gan-first-time-right/drivers-and-controllers)]. Er is gekozen voor de NCP51820 van On-Semi uit deze lijst. Deze kan hoge spanningen aan, de schakeling er om heen is makkelijk te maken door een aparte source en sync pinnen, en is goed verkrijgbaar voor een goede prijs.
|
||||
|
||||
##### Verliezen in de FET
|
||||
|
||||
De EPC2307 kan tot $62A$ continu schakelen volgens EPC.
|
||||
|
||||
$$
|
||||
P_{loss} = I^2R_{DS(on)} + P_{loss,sw}
|
||||
$$
|
||||
|
||||
$P_{loss,sw}$: schakel verliezen
|
||||
|
||||
$R_{DS(on)} = 10m\Omega$ dus bij $50A$:
|
||||
|
||||
$$
|
||||
P_{loss} = 50^2 \cdot 0.01 + P_{loss,sw} = 25W + P_{loss,sw}
|
||||
$$
|
||||
|
||||
$P_{loss,sw}$ is voor GaNFET's erg laag, in de simulatie - die gebaseerd is op de voorbeeld simulatie van EPC - schakelt die binnen $4ns$. Als we vanuit gaan van linieer schakelgedrag met liniare oplopende stroom (wat tot veel hogeve verliezen lijd dan de werkelijkheid)
|
||||
|
||||
$$
|
||||
P_{loss,sw} = \frac{UIt}{2} \cdot 2f_s
|
||||
$$
|
||||
|
||||
$U$: voedings spanning
|
||||
$I$: stroom
|
||||
$t$: schakeltijd
|
||||
$f_s$: de schakel frequentie
|
||||
|
||||
Als je dit invult:
|
||||
|
||||
$U = 120V$, $I = 50A$, $t = 4 ns$, $f_s = 50 kHz$ dan is $P_{loss,sw} = 1.2 W$.
|
||||
|
||||
Dit geeft een totaal van $P_{loss} = 16.2W$. Dit is berekent met een ruime schakelverlies met bijna $100\%$ PWM. De werkelijkheid zal het minder zijn.
|
||||
|
||||
#### Stroom Meting
|
||||
|
||||
Heel eerlijk, deze was ik een beetje vergeten, dus heb snel de ACS724 toegevoegd. Nu hopen dat die de piek stromen aan kan.
|
||||
|
||||
#### Hoek Sensor
|
||||
|
||||
Het meten van de hoek hebben we drie manieren voor gevonden:
|
||||
|
||||
- afstand sensoren naar de grond
|
||||
|
||||
Als de grond wat scheef is zal het reactiewiel het voertuig scheef (ten opzichte van zwaartekracht), waardoor het wiel steeds sneller gaat draaien tot die de maximale snelheid bereikt, dan valt het voertuig om. Niet heel handig dus.
|
||||
|
||||
- MEMS-Gyroscoop
|
||||
|
||||
Meet direct de hoek en is snel. Nadeel is als deze afwijkt veranderd de nul positie en gaat die balanceren op het verkeerde punt.
|
||||
|
||||
- MEMS-Versnellingsmeter
|
||||
|
||||
Meet de zwaartekracht direct, dus verliest de nul positie niet, maar wordt verstoord bij een stoot.
|
||||
|
||||
De beste optie is een combinatie van een MEMS-gyroscoop en een MEMS-versnellingsmeter. De versnellingsmeter zorgt er voor dat de nul positie niet verloren gaat. En de gyroscoop voor nauwkeurige meting van de hoek. Deze combinatie wordt ook een IMU (Inertial measurement unit) genoemd.
|
||||
|
||||
Uiteindelijk is de M5Stack IMU Pro Mini gekozen, dit is een module in behuizing met een connector. Dit is erg handig, omdat deze goed schokvrij bevestigt moet worden. Er zit ook nog een kompas en luchtdruk sensor op, maar er zijn geen plannen om deze te gebruiken.
|
||||
|
||||
In deze module zit de BMI270^[[https://www.bosch-sensortec.com/products/motion-sensors/imus/bmi270/](https://www.bosch-sensortec.com/products/motion-sensors/imus/bmi270/)] van Bosch. De I^2^C bus van deze IC is direct verbonden met de connector naar buiten toe.
|
||||
|
||||
#### Microcontroller
|
||||
|
||||
Er zijn niet veel vereisten voor de microcontroller, bijna alle microcontrollers hebben SPI, I2C interfaces en een ADC voor de stroom meting. Het belangrijkste is dat die genoeg rekenkracht heeft voor de FOC berekeningen.
|
||||
|
||||
Uiteindelijk is gekozen voor een RP2040 van Raspberry Pi, deze heeft twee ARM Cortex M0+ cores die tot 150 MHz aan kunnen. Het grote voordeel van deze microcontroller is dat ik al een ontwerp klaar heb liggen met alle benodigde componenten.
|
||||
|
||||
#### Encoder
|
||||
|
||||
Voor FOC moet de positie van polen (magneten) in de rotor ten opzichte van de slots (elektro magneten) in de rotor. Hoe nauwkeuriger dit is hoe effectiever de FOC is om met maximale vermogen uit de motor te kunnen halen.
|
||||
|
||||
Veel motoren worden geleverd met drie hall-effect sensoren die deze relatieve positie direct meten, allen zijn deze niet heel nauwkeurig op lage snelheden.
|
||||
|
||||
Een Relatieve rotary encoder, zoals een optische die sloten telt in een schrijf die gemonteerd is aan de rotor, kan veel nauwkeuriger. Het nadeel is dat deze gekalibreerd moet worden elke keer als de stroom er afgaat.
|
||||
|
||||
Een absolute rotary encoder hoeft maar 1 keer gekalibreerd te worden. De meeste. Er zijn twee soorten absolute encoders die veel gebruikt worden, een die om een as gemonteerd worden (zoals de AMT212B-V^[[https://www.sameskydevices.com/product/motion-and-control/rotary-encoders/absolute/modular/amt212b-v](https://www.sameskydevices.com/product/motion-and-control/rotary-encoders/absolute/modular/amt212b-v)]) of een die de oriëntatie van een magneet meet (zoals de AS5600^[[https://ams-osram.com/products/sensor-solutions/position-sensors/ams-as5600-position-sensor](https://ams-osram.com/products/sensor-solutions/position-sensors/ams-as5600-position-sensor)]).
|
||||
|
||||
Er is gekozen voor een breakout board te kopen van de AS5600, deze is het makkelijkst de monteren en goed verkrijgbaar van de absolute encoders.
|
||||
|
||||
### Schema
|
||||
|
||||
Het schema is gemaakt in KiCad
|
||||
|
||||
#### Half-bridge
|
||||
|
||||
Voor een BLDC-motor driver zijn drie half-bridges nodig. Bij een ontwerp van een half bridge zijn twee belangrijke dingen, naast component keuze. De gate driver en de power filtering.
|
||||
|
||||
##### Power Filtering
|
||||
|
||||
In dit ontwerp worden GaNFET's gebruikt, deze schadelijk binnen enkele nanosecondes. Eleke hoeveelheid aan inductie vanaf de voeding vertraagt deze snelheid, en is een antenne voor de honderden MHz dat door deze schakelsnelheid gegenereerd wordt. Er moeten dus condensatoren zo dicht mogelijk bij de FET's om de inductie zo minimaal mogelijk te maken. Deze moeten ook keramische zijn door de lage ESR. Een nadeel is dat deze voor veel motor drijvers eigenlijk te groot zijn waardoor de afstand tussen de condensator en FET's te groot wordt als de filtering in 1 stage gaat.
|
||||
|
||||
Om te berekenen hoeveel stages nodig zijn, moet eerste de layout gemaakt worden (hier meer over in het hooftstuk PCB). Bij de layout is het geluk om $7.2 \mu F$ (5 x $1\mu F$ en 1 x $2.2\mu F$) in de eerste stage te plaatsen.
|
||||
|
||||
> TODO: ref to hooftstuk pcb needed!
|
||||
|
||||
Na veel experimenteren in een simulatie in LTspice lijkt $7.2\mu F$ wel weinig, het zal een stuk beter zijn als er $20\mu F$ zal passen.
|
||||
|
||||
De tweede stage is wat klein gehouden, om in inschakelstroom beperkt te houden. Dit betekent wel dat er erg dikke kabels nodig zijn om het volledige vermogen aan te kunnen.
|
||||
|
||||
Helaas is de simulatie gecrasht en het bestand corrupt geraakt. Het is hierna niet meer gelukt om de simulatie stabiel opnieuw op te bouwen (vermogens van honderden KW bij een kleine aanpassing). Onder staat is de schakeling van de opnieuw opgebouwde schakeling die dus niet werkt.
|
||||
|
||||
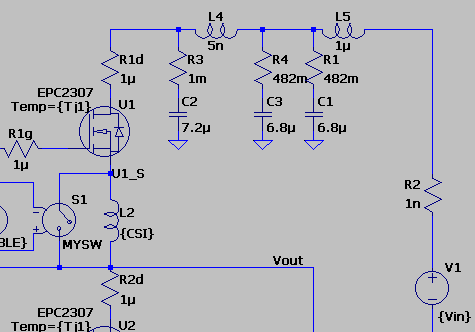
|
||||
|
||||
C2 zijn de keramische condensatoren vlak bij de FET's (eerste stage), C3 en C1 zijn solid polymer aluminum capacitors voor de tweede stage. L4 is een ingeschatte inductie van de verbinding tussen de condensatoren en L5 is de inductie van de kabels vanaf de accu.
|
||||
|
||||
De condensator waardes zijn een stuk groter dan op het evaluatiebord. Hier zitten 7 condensatoren van $22nF$ op ($125nF$ totaal). Ik vermoed dat mijn simulaties wat pessimistischer zijn dat de werkelijkheid.
|
||||
|
||||
##### Gate Driver
|
||||
|
||||
Het simulatiemodel van de gate driver IC is alleen beschikbaar voor Simplus. Het is mij niet gelukt om de gratis versie van deze software werkend te krijgen of het model te converteren naar een ander format. Dus het berekenen of simuleren voor gate driver gaat niet lukken. Dus ik heb een referentieontwerp van EPC overgenomen met een $0\Omega$ weerstand bij de sync (hier is wel een $0\Omega$ jumper gebruikt zodat die later vervangen kan worden met een weerstand) en $0.39\Omega$ voor de source.
|
||||
|
||||
#### Microcontroller
|
||||
|
||||
De microcontroller schakeling is een kopie van een hobby project, deze schakeling is al getest. Er is niks veranderd aan dit ontwerp voor dit project, behalve dat er andere io pinnen gebruikt worden.
|
||||
|
||||
### PCB
|
||||
|
||||
#### Stroom Distributie
|
||||
|
||||
Vijftig ampère is erg veel voor een PCB.
|
||||
|
||||
> KiCad Calculator Tools:
|
||||
> "The calculations are valid for currents up to $35 A$ (external) or $17.5 A$ (internal), temperature rises up to $100^\circ C$, and widths of up to 400 mils (10mm)"
|
||||
|
||||
Deze tool heeft voor $35A$, $150mm$ spoor lengte en $10^\circ C\Delta$ met $70\mu m$ koper een spoor breedte van $20.2mm$. De spoorbreedte is al buiten het berijk van deze tool. Als we toch de stroom verandert naar $50A$ wordt dit $33.1mm$.
|
||||
|
||||
Met dezelfde instellingen voor $50A$ in de calculator van DigiKey keeft die dezelfde resultatie. En die van AdvancedPCB, PCBWay en OMNI calculator. Of ze gebruiken allemaal dezelfde beperkte formule of het klopt redelijk.
|
||||
|
||||
Er is gekozen om een spoor breedte van $40mm$ te gebruiken om iets marge te hebben als deze rekenmachines afwijken. Dit is erg breed, dus dit verdeeld gedaan over een buiten laag en een binnen laag plus nog een extra marge omdat binnenlagen minder goed koelen. De lagen zijn om en om gedaan, zodat het beetje capaciteit tussen deze lagen de inductie ietsje compenseert.
|
||||
|
||||
#### Half-bridges
|
||||
|
||||
Gelukkig heeft EPC (de fabrikant van de FET's) een aantal aangeraden layouts.
|
||||
|
||||
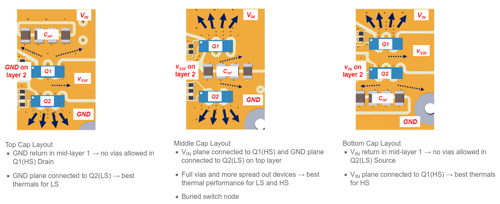
|
||||
|
||||
Bij dit project worden de high-side (HS) en low-side (LS) FET's ongeveer hetzelfde belast, dus ze hebben dezelfde koeling nodig. Dus er is voor de middelste optie gekozen.
|
||||
|
||||
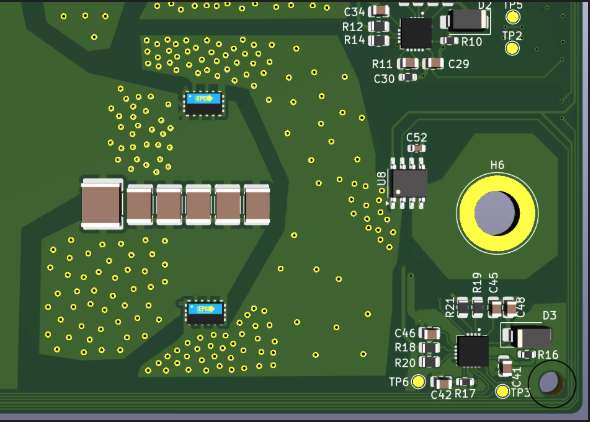
|
||||
|
||||
|
||||
Hierboven is de layout te zien. De rij condensatoren in het midden tussen de twee FET's (met veel vias er omheen). Rechts daar van de SOIC-8 is de stroom meting IC en rechts onderin de gate driver.
|
||||
|
||||
De uitgang van de FET's voor de stroom meet IC is er ook in de binnen laag direct onder de top laat (de render is van de top laag). Deze zit er om de stroom loop zo'n klein mogelijk oppervlak te geven met de condensatoren, door er onder door te gaan. Hierom stoppen de vias van de voeding ook zo abrupt.
|
||||
|
||||
## Productie
|
||||
|
||||
De PCB en stencel zijn gepoduceert door JLCPCB en de componenten zijn gelaats en in de reflow oven gegaan in het SMD-lab op Accademiplein.
|
||||
|
||||
Na dat die uit de over kwam zijn er een aantal soleer balletjes weggehaald, twee soldeer bruggen weg gehaald bij een van de gate driver IC's en de microcontroller opnieuwe met de hand erop gelaast. De microcontroller had teveel tin op de groundpad aan de onderkant, waardoor deze omhoog kwam en de pinnen aan de zijkant boven de PCB zweefde onder contact.
|
||||
30
markdown/detailontwerp_stuursysteem.md
Normal file
@@ -0,0 +1,30 @@
|
||||
---
|
||||
tags: kladjes, elektro, elektro/hr, elektro/hr/pee51
|
||||
---
|
||||
|
||||
[parent](/tPb3Up1fQEuZ86yrJSkYRQ)
|
||||
|
||||
|
||||
## Vehicle Control unit
|
||||
|
||||
De VCU is een belangrijk onderdeel van het systeem, hiermee kunnen we het voertuig in een richting sturen en vooruit bewegen, de belangrijkste keuzes hierin zijn in welke taal we willen gaan programmeren en wat voor soort microcontroller we willen. De reden hiervoor is zodat de volgende team makkelijker kan omgaan met de code en het systeem makkelijker kunnen uitbreiden. het makkelijkst is dan om met de Arduino IDE en taal verder te gaan, omdat het een bekent en veel gedocumenteerd systeem is waar je veel over kan vinden op internet tegenover veel andere IDE's, programmeer talen en microcontrollers. verder moet het ook draadloos verbinding kunnen maken met een console controller zodat de volgende teams eventueel een andere keuze kunnen maken hoe ze willen sturen. Daarom hebben we voor de ESP32 gekozen omdat het alles aantikt met een gezond aantal GPIO pinnen.
|
||||
|
||||
## Actuator
|
||||
|
||||
De actuator hebben we nodig om de wielen in een richting te kunnen sturen volgens Max Kappert(student automotive engineer) hebben we de volgende parameters gekregen die we nodig hebben om het voertuig te kunnen sturen.
|
||||
|
||||
| Parameter | Waarde | Eenheid | Opmerking |
|
||||
|--------------------------------|-------------|------------|----------------------|
|
||||
| Voertuigspanning | 12 - 14 | $V_{DC}$ | typisch voor auto-ECU's |
|
||||
| Stuurspanningdemperkle | 0 - 5 | $V_{DC}$ | naloge regeling |
|
||||
| PWM-signaal frequentie | 1000 - 3000 | $Hz$ | Typische range voor aansturing |
|
||||
| PWM duty cycle | 10 - 90 | $\%$ | $0%$: minimale demping, $90%$: maximale demping |
|
||||
| Stroomverbruik klep | 0.5 - 2 | $A$ | Afhankelijk van de interne weerstand |
|
||||
| Wielsnelheid | 0 - 250 | $km/h$ | Meet snelheid per wiel |
|
||||
| Karrosserieversnelling | -3 tot +3 | $g$ | Laterale en verticale versnellingen |
|
||||
| Axiale potentiometer (veerweg) | 0 - 50 | $mm$ | Meet veeruitslag |
|
||||
| Temperatuur werkbereik | -40 tot +85 | $^\circ C$ | Automobielstandaard |
|
||||
|
||||
Voor de Actuator is er een keuze gemaakt voor CDC (Continuous Damping Control) demper van SACHS, Maar vanwege de besteltijden van dit soort componenten kunnen we dit niet gebruiken. Daarom gebruiken we een actuator die er al staat, de A0-01/M van S-LINE. om de actuator te besturen gebruiken we een motordriver, de MDD20A. Dit is omdat we het al hebben en werkt met de huidige actuatoren en voldoende de parameters van de actuatoren behaald, daarom hebben we besloten om niet een nieuwe te kopen of te ontwerpen. Om ervoor te zorgen dat de actuatoren niet te ver gaan gebruiken we de AS5600 magnetic encoder. Dit is omdat de encoder een absoluut positie meegeeft en daarom voor minder problemen zorgt als het voertuig opnieuw opstart.
|
||||
|
||||
|
||||
106
markdown/pakket_van_eisen.md
Normal file
@@ -0,0 +1,106 @@
|
||||
---
|
||||
tags: kladjes, elektro, elektro/hr, elektro/hr/pee51
|
||||
---
|
||||
|
||||
[parent](/tPb3Up1fQEuZ86yrJSkYRQ)
|
||||
|
||||
# Pakket van Eisen
|
||||
|
||||
[toc]
|
||||
|
||||
## Inleiding
|
||||
|
||||
Bij dit project is de SPC^[Superlight Personal Carrier] opgesplitst in een aantal onderdelen. de eisen zijn verdeeld over deze onderdelen.
|
||||
|
||||
Deze onderdelen zijn gesplitst op basis van welke onderdelen die in dit project verbeterd worden.
|
||||
|
||||
## Eis identificatie code
|
||||
|
||||
```
|
||||
REQ-X-X[XX]
|
||||
| | |
|
||||
| | +- MH: zonder is het product niet bruikbaar
|
||||
| | SH: het product is zonder ook bruikbaar, maar is zeer gewenst
|
||||
| | CH: als het binnen de tijd lukt is het gewenst
|
||||
| | WH: niet gewenst
|
||||
| |
|
||||
| +--- uniek identificatie nummer
|
||||
|
|
||||
+----- A: algemeen
|
||||
W: wiel assembly
|
||||
S: stabilisatie
|
||||
C: VCU
|
||||
```
|
||||
|
||||
## Definities
|
||||
|
||||
**Het voertuig**: De Superlight Personal Carrier die tijdens dit project gemaakt/verbeterd wordt.
|
||||
**Bestuurder**: De persoon die in het voertuig zit, en het voertuig bestuurd.
|
||||
|
||||
## Algemene eisen
|
||||
|
||||
**REQ-A-1[MH]: Het voertuig exclusief bestuurder weegt 250 kilogram of minder.**
|
||||
|
||||
**REQ-A-2[MH]: Het voertuig heeft een totale lengte van 4 meter of minder.**
|
||||
|
||||
**REQ-A-3[MH]: Het voertuig heeft een totale breedte van 60 centimeter of minder.**
|
||||
|
||||
**REQ-A-4[MH]: Het voertuig is ontworpen[^ontwerp] zodat de maximale snelheid 60 kilometer per uur of sneller is.**
|
||||
|
||||
60 km/h is de minimale snelheid voor op de snelweg^[[https://www.rijksoverheid.nl/onderwerpen/wegen/vraag-en-antwoord/wat-is-de-minimumsnelheid-voor-het-wegverkeer](https://www.rijksoverheid.nl/onderwerpen/wegen/vraag-en-antwoord/wat-is-de-minimumsnelheid-voor-het-wegverkeer)].
|
||||
|
||||
**REQ-A-5[SH]: Het voertuig is ontworpen[^ontwerp] zodat die 150 kilometer per uur of sneller kan rijden in ideale omstandigheden[^omstandig].**
|
||||
|
||||
**REQ-A-6[SH]: Het voertuig is ontworpen[^ontwerp] zodat die 100 kilometer actieradius of meer kan bereiken in ideale omstandigheden[^omstandig].**
|
||||
|
||||
De opdracht gever wil graag tussen Amsterdam van Rotterdam kunnen rijden.
|
||||
|
||||
**REQ-A-7[CH]: Het voertuig is ontworpen[^ontwerp] zodat die 250 kilometer actieradius of meer kan bereiken in ideale omstandigheden[^omstandig].**
|
||||
|
||||
[^ontwerp]: Binnen de tijdspan van dit project is het niet mogelijk om op deze eisen te testen buiten een simulatie of rekenmodel.
|
||||
|
||||
[^omstandig]: De ideale omstandigheden is op een vlakke rechte geasfalteerde weg zonder wind, regen, hagel, sneeuw of andere weersomstandigheden die een negatief gevolg op de test kunnen hebben.
|
||||
|
||||
**REQ-A-8[CH]: Het voertuig is bestand tegen corrosie**
|
||||
|
||||
**REQ-A-9[SH]: Het voertuig kan bedient worden door een bestuureder van 130 kilogram of minder.**
|
||||
|
||||
**REQ-A-10[SH]: Het voertuig kan bediend worden door een bestuurder met een lengte van 150 centimeter tot en met 200 centimeter.**
|
||||
|
||||
> bron https://www.cbs.nl/nl-nl/maatwerk/2021/37/lichaamslengte
|
||||
> 8% van 19 jarige vrouwen zijn korter dan 160
|
||||
> 10.2% van 19 jarige mannen zijn korter dan 175
|
||||
|
||||
**REQ-A-11[MH]: De bestuurder van het voertuig zit volledig binnen de afmetingen van het voertuig, met uitzondering van de hoogte.**
|
||||
|
||||
**REQ-A-12[SH]: Het zwaarte punt van het voertuig ligt 45 centimeter of minder boven de grond bij een vlakke grond.**
|
||||
|
||||
## Wiel Assembly
|
||||
|
||||
**REQ-W-1[MH]: het voertuig heeft twee wielen.**
|
||||
|
||||
**REQ-W-2[MH]: het voertuig wordt aangedreven door beide wielen.**
|
||||
|
||||
**REQ-W-3[SH]: het voertuig stuurt met beide wielen.**
|
||||
|
||||
**REQ-W-4[MH]: het voertuig wordt aangedreven door elektromotoren.**
|
||||
|
||||
**REQ-W-5[SH]: het voertuig kan remmen doormiddel van regenerative braking.**
|
||||
|
||||
**REQ-W-6[SH]: de aandrijving bevindt zich in het wiel.**
|
||||
|
||||
**REQ-W-7[MH]: het voertuig heeft een remvertraging van 6 meter per seconde per seconde of meer.**
|
||||
|
||||
**REQ-W-8[MH]: het voertuig heeft een draaicirkel van 6 meter in diameter of minder.**
|
||||
|
||||
## Stabilisatie
|
||||
|
||||
**REQ-S-1[MH]: Het voertuig wordt actief gestabaliseerd**
|
||||
|
||||
**REQ-S-2[SH]: Het voertuig kan uit zichzelf weer recht komen te zitten vanaf een roll hoek van 5 graden**
|
||||
|
||||
## VCU
|
||||
|
||||
**REQ-C-1[MH]: het voertuig wordt bestuurd doormiddel van een elektronisch input, zoals een joystick, die bedienbaar is door de bestuurder.**
|
||||
|
||||
**REQ-C-2[MH]: er is een noodstop aanwezig.**
|
||||
@@ -4,154 +4,455 @@ tags: kladjes, elektro, elektro/hr, elektro/hr/pee51
|
||||
|
||||
[parent](/tPb3Up1fQEuZ86yrJSkYRQ)
|
||||
|
||||
# Plan van Aaanplak
|
||||
# Plan van Aanpak
|
||||
|
||||
## Voorwoord
|
||||
|
||||
Voor u ligt het **Plan van aanpak** (PVA) voor het project **Superlight Personal Carrier (SPC) 2025**. Dit document vormt de leidraad voor de uitvoering van het project en beschrijft de probleemstelling, doelstellingen, methodologische aanpak en de verwachte resultaten.
|
||||
|
||||
Het SPC-project is een innovatief en interdisciplinair initiatief waarin studenten van verschillende opleidingen samenwerken om een lichtgewicht, zelf stabiliserend eenpersoonsvoertuig te ontwikkelen. Dit project bouwt voort op eerdere inspanningen en richt zich op het verder verfijnen en implementeren van cruciale systemen zoals de aandrijving, het stuurmechanisme en de Digital Twin-technologie.
|
||||
|
||||
Dit document is met zorg samengesteld en biedt een helder overzicht van de huidige status van het project, de uitdagingen die voor ons liggen en de strategieën die we hanteren om deze te overwinnen. We willen hierbij onze begeleiders, docenten en projectpartners bedanken voor hun ondersteuning en waardevolle inzichten.
|
||||
|
||||
## Inhoud
|
||||
|
||||
[toc]
|
||||
|
||||
## Achtergrond
|
||||
## Inleiding
|
||||
|
||||
Dit project is gestart in 2019 door een aantal studenten van opleiding Automotive van Hogeschool Rotterdam. Niels van Groningen is de opdracht gever voor dit project.
|
||||
Voor dit semester wordt er verder gewerkt aan het project **Superlight Personal Carrier (SPC)**. Het SPC-project is een samenwerking tussen studenten uit verschillende opleidingen bevordert, met als doel een lichtgewicht, zelf stabiliserend éénpersoonsvoertuig te ontwikkelen. Dit semester is gericht op het verfijnen en verbeteren van essentiële subsystemen, zoals het aandrijf- en stuursysteem en stabilisatie, waarbij er parameters uit een Digital Twin gehaald worden.
|
||||
|
||||
Dit project begint met een opgesteld **Plan van Aanpak (PvA)**. Dit document biedt een solide basis voor het project door de belangrijkste stappen, doelstellingen en methodologieën te beschrijven. Het PvA fungeert als leidraad en naslagwerk voor alle betrokkenen, en brengt duidelijkheid over wat er moet worden gedaan, hoe het moet worden uitgevoerd, en wat de verwachte resultaten zijn.
|
||||
|
||||
Naast een overzicht van de werkzaamheden biedt het PvA inzicht in essentiële aspecten zoals:
|
||||
|
||||
- **Planning:** Een gedetailleerd tijdschema dat de voortgang bewaakt en mijlpalen vastlegt.
|
||||
- **Kosten:** Een overzicht van de budgettaire eisen en financieringsmogelijkheden om het project binnen de gestelde grenzen te houden.
|
||||
- **Risico's:** Identificatie en beheersing van mogelijke obstakels om de betrouwbaarheid en kwaliteit van het eindresultaat te garanderen.
|
||||
|
||||
Door deze gestructureerde aanpak wordt een basis gelegd voor een uitvoering van het project. Het PvA maakt het mogelijk om op een doelgerichte manier toe te werken naar een functioneel en valideer baar eindresultaat: een rijdend voertuig dat klaar is voor verdere ontwikkeling.
|
||||
|
||||
## Probleemdefinitie
|
||||
|
||||
### Probleemstelling
|
||||
|
||||
Hedendaags worden er veel grote voertuigen gebruikt om enkele personen te vervoeren. In 2019 zaten er gemiddeld 1,37 mensen in 1 auto in het woon-werkverkeer, dit terwijl een auto vaak 2 tot 5 personen kan vervoeren^[verkeerskunde.nl, 2023]. Doordat men in grotere voertuigen rijden leidt dit tot meer drukte op de weg en dus minder files.
|
||||
Het probleem is dat er onzekerheden zijn over het voertuig en dat de SPC niet correct ontwikkeld is om te valideren. Hierdoor is het moeilijk om aan te tonen of de functionaliteit voldoet aan de gestelde eisen en of de subsystemen daadwerkelijk bruikbaar zijn in de praktijk.
|
||||
|
||||
### De Voorgestelde Oplossing
|
||||
### Doelstelling
|
||||
|
||||
De Superlight Personal Carrier is een lichtgewicht één persoonsvoertuig. Dit voertuig is veel kleiner dan andere auto's en neemt dus minder ruimte in op de weg. Dit resulteert in meer voertuigen per uur over dezelfde weg kunnen.
|
||||
Het doel van het project is om de functionaliteit van de SPC te verbeteren door een functionele aandrijving en een stuurmechanisme te ontwerpen die praktisch toepasbaar zijn in het fysieke voertuig. Deze systemen zullen worden ontworpen en geoptimaliseerd met behulp van data uit een Digital Twin, die als leidraad dient voor het gehele ontwikkelingsproces. Daarnaast zal het stabilisatiesysteem verder ontwikkeld worden, met als uiteindelijk doel een full- scale implementatie in het voertuig.
|
||||
|
||||
### Oplossing van onze voorgangers
|
||||
### Vraagstelling
|
||||
|
||||
Er is al een concept voor een twee wiel voertuig ontworpen een deels gefabriceerd. Deze heeft de een elektro motor in elk van de wielen. Het stuur mechanisme wordt elektrische aangestuurd. De bestuurder kan dus met een joystick alles aansturen. Het idee is om het semiautomatsche rijdend te maken. Het voertuig wordt rechtgehouden door een reactie wiel.
|
||||
#### Hoofdvraag
|
||||
|
||||
### Betrokken partijen
|
||||
"Hoe ziet een functioneel en valideer baar aandrijf- en stuursysteem voor de SPC eruit, waarbij stabilisatie is geïntegreerd in het ontwerp en gebruik wordt gemaakt van een digital twin voor ontwikkeling, optimalisatie en validatie?"
|
||||
|
||||
| Functie | Naam | opleining | Email |
|
||||
|-------------------|---------------------|------------|------------------|
|
||||
| Opdracht gever | Niels van Groningen | Automotive | ...@hr.nl |
|
||||
| Docentbegeleider | Joris Straver | ELE | j.g.Straver@hr.nl|
|
||||
| Project lid | Max Kappert | Automotive | 1030682@hr.nl |
|
||||
| Project lid | Tijn Snijders | Automotive | 1001829@hr.nl |
|
||||
| Project lid | Chris Tan | ELE | 0992143@hr.nl |
|
||||
| Project lid | Gryvon Belfor | ELE | 0985890@hr.nl |
|
||||
| Project lid | Mohamed El Morabiti | ELE | 1014780@hr.nl |
|
||||
| Project lid | Finley van Reenen | ELE | 0964590@hr.nl |
|
||||
#### Deelvragen
|
||||
|
||||
## Projectresultaat
|
||||
1. **Huidige situatie & knelpunten**
|
||||
- Wat is de huidige status van de SPC en welke onzekerheden bestaan er in het huidige ontwerp?
|
||||
- Welke technische beperkingen belemmeren de validatie van de SPC?
|
||||
2. **Ontwerp en validatie van het aandrijf- en stuursysteem**
|
||||
- Welke ontwerpcriteria moeten worden gehanteerd voor een functionele en bruikbare aandrijving?
|
||||
- Hoe kan een stuurmechanisme worden ontworpen dat werkt zonder een traditioneel stuur?
|
||||
- Welke methoden kunnen worden gebruikt om de werking van deze systemen te valideren?
|
||||
3. **Gebruik van een Digital** **Twin**
|
||||
- Hoe kan een digital twin bijdragen aan de ontwikkeling en validatie van de aandrijving en het stuurmechanisme?
|
||||
- Welke parameters en data zijn nodig om een betrouwbare digital twin op te stellen?
|
||||
4. **Stabilisatie en implementatie**
|
||||
- Hoe kan het stabilisatiesysteem verder worden ontwikkeld en geoptimaliseerd?
|
||||
- Op welke manier kan een full-scale implementatie van de SPC worden gerealiseerd?
|
||||
5. **Kwaliteitsborging en testen**
|
||||
- Hoe kan de functionaliteit van het systeem worden gekwantificeerd en geëvalueerd?
|
||||
- Welke testmethoden kunnen worden gebruikt om de prestaties van de SPC te meten en te valideren?
|
||||
|
||||
## Doelstelling
|
||||
### Current State
|
||||
|
||||
- Er wordt een Digital Twin gemaakt om te kunnen berekenen wat er nodig is om de de eisen te halen.
|
||||
- Het reactiewiel om het voertuig te stabaliseren verder ontwikkeld zodat deze in het voertuig geplaatst kan worden.
|
||||
- Het stuur mechnisme wordt gerepareerd en bedienbaar gemaakt met een joystick.
|
||||
- Het mechanisme voor de wielaandrijving, en als het binnen de tijd lukt wordt deze ook bedienbaar gemaakt met de joystick.
|
||||
In de vorige projectfasen is een prototype ontwikkeld van de **Superlight Personal Carrier (SPC)**, waarin verschillende technologieën en subsystemen zijn getest. Op dit moment bestaat de SPC uit:
|
||||
|
||||
## De opdracht
|
||||
- Een testframe waarop componenten kunnen worden gemonteerd en geëvalueerd.
|
||||
- Een op schaal geteste opstelling met een reactiewiel om de stabilisatie te behouden.
|
||||
- Een ruwe simulatie met geschatte parameters voor de aandrijving en het stuursysteem.
|
||||
|
||||
In dit project wordt the stuursysteem herontworpen, een digital twin en het reactiewiel voor sabilisatie gemaakt.
|
||||
#### Huidige status van het aandrijfsysteem
|
||||
|
||||
### stuursysteem
|
||||
##### Motor en aandrijving
|
||||
|
||||
De vorige groep heeft geconstateerd dat er gebrekken zijn aan het huidige mechanisme voor het stuuren. Om deze gebrekken te verbeteren moet het systeem opnieuw optworpen en gefabriseerd worden.
|
||||
Het huidige ontwerp maakt gebruik van een elektromotor met een geplande accupakketcapaciteit van 20,4 kWh, wat resulteert in een geschat gewicht van 94 kg (gewicht per cel \* benodigde cellen).
|
||||
|
||||
Wij gaat dit systeem herontwerpen zodat de volgende groep zich kan focusen op de aandrijving van de wielen.
|
||||
Er is nog geen definitieve keuze gemaakt tussen directe aandrijving (zoals een naafmotor) en een indirecte aandrijving (zoals een centrale motor met riem- of kettingoverbrenging).
|
||||
|
||||
### digital twin
|
||||
De huidige aandrijving is nog niet geïntegreerd met het stuursysteem, waardoor het effect op rijgedrag en stabiliteit onbekend is.
|
||||
|
||||
Om goed in beeld te krijgen wat er nodig is om het de snelheid en actieradius doelen te behalen, wordt er een ditital twin gamaakt. Deze word zo gamaakt zodat de keuze voor aandrijving en andere keuzes die nog niet vast staan eenvouding aan te passen zijn.
|
||||
##### Simulatie en validatie
|
||||
|
||||
### reactiewiel
|
||||
De stabilisatie is op kleine schaal getest, maar is nog niet gevalideerd in combinatie met de aandrijving op het testframe.
|
||||
|
||||
Het reactiewiel is n tot nu toe alleen getest in schaal. Wij gaat dit schaal model vertalen naar de 1:1 versie en indien er voldoende budget is wordt deze ook geinstaleerd in het frame.
|
||||
De huidige simulaties zijn gebaseerd op geschatte parameters en vereisen een nauwkeurigere data-invoer om realistische testresultaten te kunnen leveren.
|
||||
|
||||
### afbakeningen
|
||||
##### Uitdagingen en knelpunten
|
||||
|
||||
Wij hebben niet als doel om alle eisen de behalen. Er wordt een platform gebouwd waar mee bij vervolg projecten deze eisen wel te behalen zijn.
|
||||
Het accupakket is relatief zwaar, wat invloed heeft op de prestaties en balans van de SPC.
|
||||
|
||||
Er wordt niet gewerkt aan het wiel aandrijf systeem, accu's, chacie (maar dan goed geschreven), of andere systeemen die niet temaken hebben met de drie eerder genoemde onderdelen waar wel aangewerkt worden.
|
||||
Er is nog onduidelijkheid over de samenwerking tussen aandrijving en besturing, waardoor het risico op bumpsteer en vermogensverlies bestaat.
|
||||
|
||||
## Het projectresultaat
|
||||
Er is nog geen uitgebreid testprotocol ontwikkeld om de prestaties van de aandrijving systematisch te valideren.
|
||||
|
||||
### Projectactiviteiten
|
||||
De huidige status van het project vormt de basis voor verdere ontwikkelingen. De volgende stappen zijn gericht op het verder ontwikkelen van het aandrijf- en stuursysteem en de stabilisatie, zodat er een rijdend 2x2x2 voertuig gerealiseerd wordt.
|
||||
|
||||
### Projectgrenzen
|
||||

|
||||
|
||||
## Scope & Afbakening
|
||||
|
||||
### Scope
|
||||
|
||||
De scope van een project bepaald wat er wel en niet behandeld gaat worden. Een scope wordt op meerdere aspecten gesteld. De aspecten waar onze scope over gaat zijn hieronder neergezet.
|
||||
Dit project richt zich op het ontwikkelen van functionele kernsystemen voor het voertuig, waarbij de nadruk ligt op de **aandrijving, de Digital Twin, het stuurmechanisme en de stabilisatie**.
|
||||
|
||||
#### Aandrijving en Stuursysteem
|
||||
|
||||
Een nieuw stuursysteem en doorgerekende aandrijving zijn nodig voor basis functionaliteit van het voertuig. Deze systemen moeten aan de hand van de Digital Twin ontworpen worden. Het doel licht hierop bij goed ontwerp en onderbouwing. Het is daarom essentieel dat er goed nagedacht wordt over de nodige veiligheidsfactoren en limieten van componenten.
|
||||
|
||||
#### Digital Twin
|
||||
|
||||
Wij willen aan de hand van een Digital Twin andere subsystemen op het voertuig kunnen ontwerpen, valideren en optimaliseren. Deze gegevens moeten dus de rode draad vormen voor het gehele project.
|
||||
|
||||
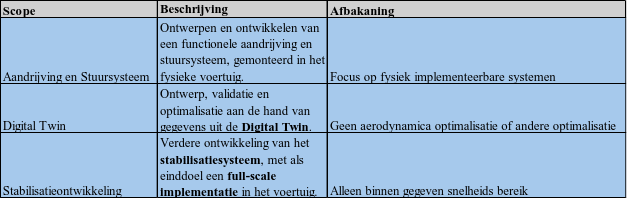
|
||||
|
||||
#### Stabilisatie
|
||||
|
||||
Het doel van het project is om het voertuig te kunnen laten stabiliseren. Dit stabiliseren zal op het full scale voertuig gaan plaats vinden. Dit systeem moet werken door middel van het correctiewiel wat op de schaal testopstelling gedemonstreerd is te werken. Het is nu de taak om dit op full scale werkend te krijgen.
|
||||
|
||||
#### Afbakening
|
||||
|
||||
- Het project richt zich primair op **functionele en fysiek implementeerbare systemen**, niet op aerodynamische optimalisatie of esthetische aspecten van het voertuig.
|
||||
- Autonome functies vallen buiten de scope van dit project.
|
||||
|
||||
## Tussenresultaten
|
||||
|
||||
> TODO: nog een leuk intro praatje toevoegen
|
||||
|
||||
### Analyse fase
|
||||
|
||||
In de analyse fase worden de volgende documenten opgesteld:
|
||||
|
||||
- **Plan van Aanpak**
|
||||
Dit document.
|
||||
- **Plan van Aanpak**: Dit document.
|
||||
- **Risico analyse**: Hier worden alle risico’s beschreven en wat we doen om de risico’s te verminderen.
|
||||
- **Pakket van eisen**: Hier worden alle eisen waar het product aan moet gaan voldoen
|
||||
- **Globale planning**: Zie hoofdstuk [Planning](#planning).
|
||||
- **Functioneel prototype?**: Een prototype om te controleren of het concept mogelijk en realistisch is.
|
||||
|
||||
- **Risico analyse**
|
||||
Hier worden alle risico's beschreven en wat we doen om de risico's te verminderen.
|
||||
### Concept fase
|
||||
|
||||
- **Pakket van eisen**
|
||||
Hier worden alle eisen waar het product aan moet gaan voldoen
|
||||
- Persoonlijk PVA
|
||||
- Het ontwerp van het product
|
||||
- Bom (Bill of Materials)
|
||||
|
||||
- **Globale planning**
|
||||
Zie hoofdstuk [Planning](#Planning).
|
||||
### Ontwerpfase
|
||||
|
||||
- **Functioneel prototype?**
|
||||
Een prototype om te controleren of het concept mogelijk en realistisch is.
|
||||
- Testprocedures
|
||||
- Het ontwerp van het product
|
||||
- Bom (Bill of Materials)
|
||||
|
||||
### Ontwerp fase
|
||||
#### Test Fase
|
||||
|
||||
- testprocedures
|
||||
- het ontwerp van het product
|
||||
- bom
|
||||
- Test rapporten
|
||||
|
||||
### test fase
|
||||
## Methodologische aanpak
|
||||
|
||||
- test raporten
|
||||
### DMADV-model
|
||||
|
||||
## Kwaliteit
|
||||
In dit hoofdstuk wordt besproken over de aanpak van de opdracht en welke methode gevolgd zal worden tijdens het semester. Dit zal gedaan worden door middel van het DMADV-model. Dat staat voor Define, Measure, Analyze, Design en Verify.
|
||||
|
||||
De kwalitijd wordt continu getest, dit word gedaan volgende de Scrum methodiek. Er worden sprintd van twee weken gedaan.
|
||||

|
||||
|
||||
#### Define
|
||||
|
||||
De eerste fase in het dmadv model is definiëren. Het is essentieel om vooraf een lijst te hebben van de taken die gedaan moeten worden en de onderdelen die gemaakt moeten worden. Als je in het begin goed hebt gedefinieerd wat en hoe het gedaan moet worden zal het makkelijker worden om naar het gewenste resultaat toe te werken. De onderdelen die zullen worden ontwikkeld en geïmplementeerd zijn de aandrijving en de sturing. Een eis is dat het voertuig in-wheel motoren moet hebben, hiervoor zal er extra aandacht aan gegeven moeten worden vanwege de complexiteit van dit onderwerp.
|
||||
|
||||
#### Measure
|
||||
|
||||
In de fase van measure verzamel en neem je de gegevens op die relevant zijn voor de CTQ-maatregelen die tijdens de eerste fase werden gedefinieerd. Deze gegevens meet je om resultaten te verkrijgen waarmee later in het proces
|
||||
|
||||
In die tabel wordt de VOC (voice of customer) genoteerd en bij punten daarvan wordt onder het kopje van drijfveer de technische of functionele kenmerken beschreven die nodig zijn om de wensen van de klant te behalen. Bij de CTQ rij wordt weergegeven wat de fysieke onderdelen zijn om die drijfveren te behalen.
|
||||
|
||||
De CTQ’s die uit de View of Client en View of Business zijn gehaald die voor dit onderzoek belangrijk zijn, zijn hieronder in tabelvorm genoteerd.
|
||||
|
||||
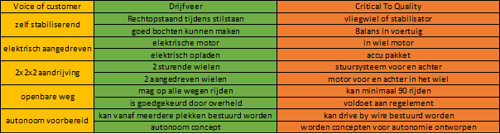
|
||||
|
||||
|
||||
De eisen opgesteld vanuit de opdrachtgever (klant) zijn als volgt:
|
||||
|
||||
- Het voertuig is elektrisch aangedreven
|
||||
- Het voertuig is zelf stabiliserend
|
||||
- Het voertuig is voor het vervoeren van 1 persoon
|
||||
|
||||
Het voertuig heeft een 2x2x2 aandrijving (2 wielen, 2 wiel gestuurd, 2 wiel aangedreven)
|
||||
|
||||
De laatste twee punten zijn eisen die van toepassing zijn op het uiteindelijke eindproduct. Dat is iets wat in de tijdsduur van dit project niet behaald zal worden. Daarom zijn die punten niet een prioriteit voor dit projectteam.
|
||||
|
||||
#### Analyze
|
||||
|
||||
In de fase van analyse worden alle verzamelde data uit de meetfase gebruikt om te analyseren en testen uit te voeren van de verschillende concepten die zijn opgesteld voor onderdelen en systemen. Die onderdelen wordt verder op gerekend en geoptimaliseerd voor hun functie en de gestelde eisen. Die eisen komen vanuit het pakket van eisen wat wordt gebruikt als referentie om ervoor te zorgen dat de onderdelen zich voldoen aan de gestelde randvoorwaarden.
|
||||
|
||||
Uit deze fase kan dan ook een ruw concept komen wat voldoet aan functionele eisen en aan de eerder gestelde CTQ's.
|
||||
|
||||
#### Design
|
||||
|
||||
In de fase van design worden alle gegevens uit eerdere fasen gebruikt zodat er een product ontwikkeld kan worden wat dichter bij het definitieve eindproduct komt. Daaruit kunnen mogelijke aanpassingen en wijzigingen worden gemaakt uit fouten die worden geïdentificeerd en kan het aan de klant worden laten zien, wat zal voldoen aan hun eisen en weer mogelijk kan worden aangepast waar nodig is.
|
||||
|
||||
#### Verify
|
||||
|
||||
De verificatiefase van het DMADV-model is weliswaar de laatste fase, maar niet het einde van het proces. Om de kwaliteit te waarborgen is het belangrijk om, continue te verifiëren en het product aanpassen waar dat dan nodig is. In deze fase zal het ontwerp dan ook definitief klaar zijn en kan er feedback worden gekregen van de klant waarmee mogelijke aanpassingen kunnen worden gemaakt die weer kunnen worden verifieerd.
|
||||
|
||||
## Organisatiestructuur (OBS, PBS, WBS)
|
||||
|
||||
### Organisatie leden
|
||||
|
||||
| Functie | Naam | Opleiding | Email |
|
||||
| --- | --- | --- | --- |
|
||||
| Opdrachtgever | Niels van Groningen | Automotive | <N.van.groningen@hr.nl> |
|
||||
| Docentbegeleider | Joris Straver | ELE | <J.g.Straver@hr.nl> |
|
||||
| Project lid | Max Kappert | Automotive | <1030682@hr.nl> |
|
||||
| Project lid | Tijn Snijders | Automotive | <1001829@hr.nl> |
|
||||
| Project lid | Thomas Braam | Automotive | <0989527@hr.nl> |
|
||||
| Project lid | Chris Tan | ELE | <0992143@hr.nl> |
|
||||
| Project lid | Gryvon Belfor | ELE | <0985890@hr.nl> |
|
||||
| Project lid | Mohamed El Morabiti | ELE | <1014780@hr.nl> |
|
||||
| Project lid | Finley van Reenen | ELE | [0964590@hr.nl](mailto:0964590@hr.nl) |
|
||||
|
||||
### OBS (Organization Breakdown Structure)
|
||||
|
||||
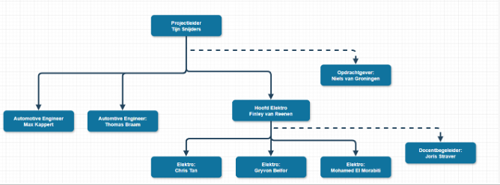
|
||||
|
||||
|
||||
### PBS (Product Breakdown Structure)
|
||||
|
||||
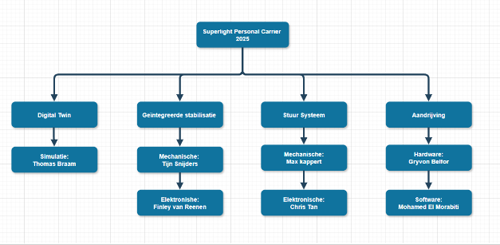
|
||||
|
||||
|
||||
### WBS (Work Breakdown Structure)
|
||||
|
||||
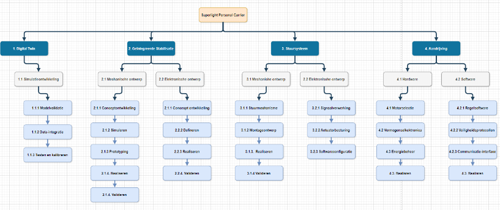
|
||||
|
||||
|
||||
## Risico- en stakeholder analyse
|
||||
|
||||
### Risico’s
|
||||
|
||||
Het Superlight Personal Carrier (SPC) project brengt studenten uit verschillende opleidingen samen, waaronder Automotive en Elektrotechniek. Dit interdisciplinaire karakter biedt kansen, maar brengt ook risico's met zich mee, vooral op het gebied van planning, communicatie en technische realisatie. In deze risicoanalyse worden de belangrijkste bedreigingen geïdentificeerd en mogelijke beheersmaatregelen besproken.
|
||||
|
||||
#### Communicatieproblemen
|
||||
|
||||
Doordat studenten uit verschillende opleidingen samenwerken, kunnen er communicatieproblemen ontstaan. Elk teamlid heeft een andere achtergrond, werkwijze en planning. Hierdoor kunnen misverstanden ontstaan over verwachtingen, deadlines en verantwoordelijkheden. Dit kan leiden tot vertragingen, inefficiënte samenwerking en fouten in het ontwerp of de uitvoering van het project.
|
||||
|
||||
##### Maatregelen
|
||||
|
||||
- Regelmatige vergaderingen inplannen om voortgang en knelpunten te bespreken.
|
||||
- Duidelijke communicatiekanalen en documentatie opzetten, zoals een gedeeld projectplan of online platform.
|
||||
- Taken en verantwoordelijkheden expliciet vastleggen, zodat iedereen weet wat er van hen verwacht wordt.
|
||||
|
||||
#### Verschillende planningen en beschikbaarheid
|
||||
|
||||
Studenten van verschillende opleidingen hebben verschillende lesroosters, deadlines en toets momenten. Dit kan ertoe leiden dat sommige teamleden minder beschikbaar zijn of moeilijker in te plannen zijn voor gezamenlijke werkzaamheden. Bovendien kunnen studenten vakken moeten herkansen, wat hun inzetbaarheid verder vermindert.
|
||||
|
||||
##### Maatregelen
|
||||
|
||||
- Een flexibele maar realistische projectplanning maken die rekening houdt met toets weken en herkansingen.
|
||||
- Taken verdelen op basis van beschikbaarheid, zodat het project niet stilvalt bij de afwezigheid van een teamlid.
|
||||
- Alternatieve communicatiemiddelen gebruiken, zoals online vergaderingen en asynchrone updates.
|
||||
|
||||
#### Te veel hooi op de vork nemen
|
||||
|
||||
Binnen het project kan de neiging ontstaan om te veel taken op je te nemen. Dit verhoogt de werkdruk en kan ertoe leiden dat taken niet goed worden uitgevoerd of deadlines niet worden gehaald. Hierdoor kunnen cruciale onderdelen van het project mislukken of niet naar behoren functioneren.
|
||||
|
||||
##### Maatregelen
|
||||
|
||||
- Duidelijke taakverdeling maken en monitoren of de werklast eerlijk is verdeeld.
|
||||
- Wekelijkse statusupdates organiseren om eventuele overbelasting te signaleren.
|
||||
- Teamleden stimuleren om tijdig hulp te vragen als ze vastlopen.
|
||||
|
||||
#### Studenten stoppen of komen niet opdagen
|
||||
|
||||
Een ander risico is dat studenten uitvallen, stoppen met het project of hun taken niet afmaken. Dit kan grote impact hebben op de voortgang en de verdeling van verantwoordelijkheden binnen het team.
|
||||
|
||||
##### Maatregelen
|
||||
|
||||
- Vanaf de start duidelijke afspraken maken over commitment en inzet.
|
||||
- Een back-up plan opstellen voor cruciale taken, zodat het project door kan gaan bij onverwachte uitval.
|
||||
- Vroegtijdig signaleren wanneer een teamlid minder betrokken raakt en hier proactief op inspelen.
|
||||
|
||||
#### Realisatie kan fout gaan
|
||||
|
||||
Tijdens de realisatie van het project kunnen technische problemen ontstaan, zoals fouten in de hardware of software, compatibiliteitsproblemen en onvoorziene storingen. Dit kan ertoe leiden dat onderdelen niet correct werken of dat het eindproduct niet aan de gestelde eisen voldoet.
|
||||
|
||||
##### Maatregelen
|
||||
|
||||
- Duidelijke technische specificaties opstellen en testen in verschillende fasen.
|
||||
- Gebruik maken van bestaande en bewezen technologieën waar mogelijk.
|
||||
- Regelmatig overleg tussen teamleden om technische obstakels snel te identificeren en op te lossen.
|
||||
|
||||
#### Unittesten en integratietesten
|
||||
|
||||
Een belangrijk onderdeel van het project is het testen van afzonderlijke componenten (unittesten) en het integreren van deze componenten in een werkend geheel (integratietesten). Zonder gedegen teststrategie kunnen fouten pas laat in het proces worden ontdekt, wat tot vertraging en herwerk leidt.
|
||||
|
||||
##### Maatregelen
|
||||
|
||||
- Een gestructureerd testplan opstellen en uitvoeren in verschillende ontwikkelingsfasen.
|
||||
- Automatische en handmatige testen toepassen om betrouwbaarheid te garanderen.
|
||||
- Problemen documenteren en direct oplossen om verdere complicaties te voorkomen.
|
||||
|
||||
#### Conclusie
|
||||
|
||||
Om het SPC-project succesvol af te ronden, is een goede planning, communicatie en technische aanpak essentieel. Door risico’s tijdig te identificeren en maatregelen te nemen, kan het team effectiever samenwerken en problemen minimaliseren. Duidelijke afspraken, regelmatige evaluaties, een evenwichtige taakverdeling en een gestructureerd testplan zijn cruciaal om de uitdagingen binnen dit interdisciplinaire project te overwinnen en een succesvol eindresultaat te garanderen.
|
||||
|
||||
### Risico matrix
|
||||
|
||||
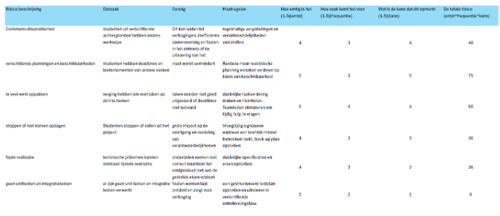
|
||||
|
||||
|
||||
### Stakeholder analyse
|
||||
|
||||
Hierin wordt een analyse gemaakt over de rollen, invloed en belangen van de verschillende belanghebbenden in dit project. Dit helpt om communicatie en samenwerking te verbeteren en eventuele conflicten te voorkomen.
|
||||
|
||||
Hieronder zijn de volgende partijen die invloed hebben op dit project bekend:
|
||||
|
||||
- Projectteemleden:
|
||||
- Gryvon Belfor
|
||||
- Tijn Snijders
|
||||
- Thomas Braam
|
||||
- Max Kappert
|
||||
- Finley van Reenen
|
||||
- Mohamed El Morabiti
|
||||
- Chris Tan
|
||||
- Begeleiders (school):
|
||||
- Niels van Groningen
|
||||
- Joris Straver
|
||||
- Eindgebruiker/klant:
|
||||
- Niels van Groningen
|
||||
|
||||
Het belang en invloed wordt in dit tabel weergeven:
|
||||
|
||||
| Stakeholder | Belang | Invloed |
|
||||
| --- | --- | --- |
|
||||
| Projectteamleden | Verder ontwikkelen van de SPC naar validatie | Hoog |
|
||||
| Begeleiders (school) | Begeleiden van kwaliteit en validiteit van het eindproduct | Gemiddeld |
|
||||
| Eindgebruiker/klant | Een gebruiksklaar product voor eventuele vervolgproject | Hoog |
|
||||
|
||||
### RACI-model
|
||||
|
||||
De letters van het RACI-model staan voor rollen van de leden in een proces, namelijk:
|
||||
|
||||
R – Responsible (Verantwoordelijk): degene die de taak uitvoert is verantwoordelijk voor de uitvoering hiervan.
|
||||
|
||||
A – Accountable (Eindverantwoordelijk): deze persoon draagt de uiteindelijke eindverantwoording voor de juiste voltooiing van een of meerdere projecttaken.
|
||||
|
||||
C – Consulted (Geraadpleegd): dit is de persoon aan wie vooraf advies gevraagd wordt.
|
||||
|
||||
I – Informed (Geïnformeerd): deze persoon wordt tussentijds geïnformeerd over de beslissingen, over de voortgang, bereikte resultaten enz.
|
||||
|
||||
| | Tijn | Max | Thomas | Gryvon | Chris | Finley | Mohammed | Van Groningen |
|
||||
| --- | --- | --- | --- | --- | --- | --- | --- | --- |
|
||||
| Projectplanning | R | I | I | I | I | I | I | |
|
||||
| PVE | I | I | I | I | R | A/R | I | C |
|
||||
| Sponsering | A | R | I | I | I | I | I | I |
|
||||
| Stuursysteem | I | A/R | I | I | R | I | I | C/I |
|
||||
| Aandrijving | I | I | I | A/R | I | I | R | C/I |
|
||||
| Stabilisatie | A/R | I | I | I | I | R | I | C/I |
|
||||
| Sim model | C/I | C/I | A/R | I | I | I | I | C |
|
||||
| Concept ontwikkelen | R | R | R | R | R | R | R | C/I |
|
||||
| Begroting & kosten | A | C | C | C | R | C | C | C/I |
|
||||
|
||||
## Planning
|
||||
|
||||
Er worden twee niveaus aan van planningen gemaakt: globale planning en een detail planning. De globale planning worden de grotere lijnen van het project geplant. Het doel is om te zorgen dat de hele groep weet wanneer andere onderdelen klaar zijn om de onderdelen met elkaar te kunnen testen.
|
||||
### Tussenresultaten
|
||||
|
||||
De detailplanning is voor het plannen van deze onderdelen. Elk onderdeel zal een beperkt aantal ingenieurs aan werken, deze ingenieurs houden zelf deze planning bij.
|
||||
Het project wordt op gedeeld in verschillende sprints
|
||||
|
||||
Elke week komt de groep samen op donderdag om de planningen door te nemen en waar nodig aanpassingen maken.
|
||||
#### Analyse fase
|
||||
|
||||
De globale planning is te vinden in de [bijlagen](#Globale-Planning).
|
||||
In de analyse fase worden de volgende documenten opgesteld:
|
||||
|
||||
## Kosten en baten
|
||||
- **Plan van Aanpak**
|
||||
Dit document.
|
||||
- **Risico analyse**
|
||||
Hier worden alle risico’s beschreven en wat we doen om de risico’s te verminderen.
|
||||
- **Pakket van eisen**
|
||||
Hier worden alle eisen waar het product aan moet gaan voldoen
|
||||
- **Globale planning**
|
||||
Zie hoofdstuk [Planning](#planning).
|
||||
- **Functioneel prototype?**
|
||||
Een prototype om te controleren of het concept mogelijk en realistisch is.
|
||||
|
||||
kosten: voor dit project is het budget nog onbekend.
|
||||
baten: omdat het budget nog onbekend is, is het moeijlijk te bepalen wat de baten voor het budget zijn.
|
||||
#### Ontwerpfase
|
||||
|
||||
## Risico’s
|
||||
- Testprocedures
|
||||
- Het ontwerp van het product
|
||||
- Bom (Bill of Materials)
|
||||
|
||||
in dit onderdeel worden de risico's uitgelegd. in de uitleg worden de risico's gedeeld in interne en externe risico's.
|
||||
Interne Risico's:
|
||||
#### Test fase
|
||||
|
||||
- communicatie en tijden afspreken
|
||||
- te kort aan kennis
|
||||
- onbekend budget
|
||||
- niet behaalde deadlines
|
||||
- Test rapporten
|
||||
|
||||
externe risico's:
|
||||
### Value planning
|
||||
|
||||
- componenten niet meer op voorraad
|
||||
- lange levertijden
|
||||
- werkzaamheden buiten de scope van het project uitvoeren
|
||||
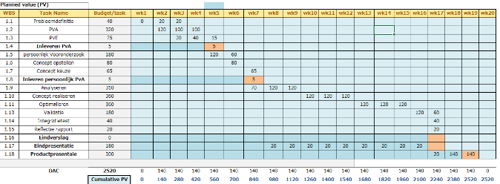
|
||||
|
||||
In de bijlagen is een tabel van een risicoanalyse te vinden.
|
||||
|
||||
## Bijlage
|
||||
### Dynamische planning
|
||||
|
||||
### Globale Planning
|
||||
Deze planning geeft een overzicht van de verschillende fasen en bijbehorende taken binnen dit project. Door middel van een Gantt-diagram worden de doorlooptijden, afhankelijkheden en mijlpalen visueel weergegeven. De planning is opgedeeld in meerdere sprints, waaronder **Sprint Analyseren**, **Sprint Realiseren**, **Sprint Optimaliseren**, en **Sprint Valideren**, waarmee het project stapsgewijs wordt ontwikkeld en geoptimaliseerd.
|
||||
|
||||
waro?
|
||||
|
||||
### Risico analyse
|
||||
De blauwe balken geven de duur van elke taak aan, terwijl de diamantvormige symbolen belangrijke mijlpalen markeren. De rode verticale lijn geeft de huidige voortgang weer. Dit overzicht helpt bij het bewaken van deadlines, het coördineren van werkzaamheden en het tijdig bijsturen van het project waar nodig
|
||||
|
||||
waro?
|
||||
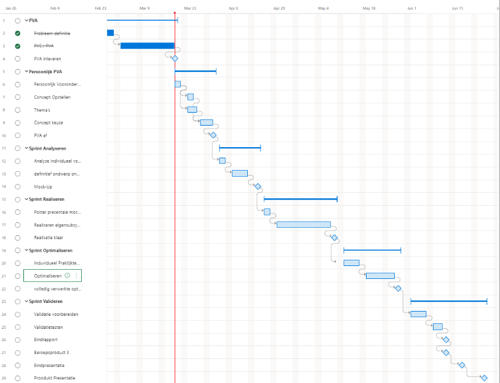
|
||||
|
||||
|
||||
## Begroting
|
||||
|
||||
Het project moet uiteindelijk een rijdend en zelf stabiliserend voertuig produceren, het moet op 2 wielen rijden en bestuurd worden d.m.v. vehicle control unit (een joystick of een controller). We baseren de prijzen op de keuzes die gemaakt zijn door het vorige projectteam en een vooronderzoek dat is gedaan. Voor de wielmotoren hebben een 8kW nodig om de originele eisen van 150km/u te behalen, daarbij komt ook een batterijpakket bij kijken die minimaal 120V en 280Ah moet zijn. Voor het stabilisatie systeem hebben we ook hoogstwaarschijnlijk een motor met veel koppel nodig. Om de drive by wire besturing te kunnen implementeren hebben we 2 actuatoren nodig, één voor en één achter. Daarnaast hebben we een vehicle control unit nodig om het voertuig te besturen.
|
||||
|
||||
Kosten: voor dit project is het budget nog onbekend.
|
||||
|
||||
Baten: omdat het budget nog onbekend is, is het moeilijk te bepalen wat de baten voor het budget zijn.
|
||||
|
||||
De volgende tabel geeft een schatting van het benodigde budget:
|
||||
|
||||
| Item | Begroting |
|
||||
| --- | --- |
|
||||
| 2x Wielmotor | 1000-1500 |
|
||||
| Stabilisatie motor | 500-600 |
|
||||
| Banden | 100-150 |
|
||||
| Actuatoren | 400-500 |
|
||||
| Wielen | 200-300 |
|
||||
| 2x Encoders | 100-150 |
|
||||
| Vehicle control unit | 50-80 |
|
||||
| Motor controller | 100-150 |
|
||||
| Batterijpakket | 900 |
|
||||
| Frame | ??? |
|
||||
| Remmen | 200-300 |
|
||||
|
||||
## Pakket van Eisen (PvE)
|
||||
|
||||
Het volgende PVE is opgesteld in een apart document.
|
||||
|
||||
## Voertuig Validatie
|
||||
|
||||
Na de realisatie en optimalisatie van het voertuig, zal er een grondige validatie plaats vinden. De validatie zal bestaan uit verschillende hoofd criteria. Die uit geleid zijn van uit het pakket van eisen. Deze hoofd criteria zijn statische dynamische en integratie validatie testen.
|
||||
|
||||
### Statische validatie
|
||||
|
||||
|
||||
Tijdens de statische validatie zal het voertuig gevalideerd worden op de statische parameters van uit het pakket van eisen. Dit zal gebeuren door een
|
||||
|
||||
- Voertuig gewicht validatie (<250 kg ex persoon) (REQ-A-1[MH] in PvE)
|
||||
- Afmetingen (REQ-A-2[MH], REQ-A-3[MH], REQ-A-10[SH], REQ-A-11[MH] en REQ-A-12[SH] in PvE)
|
||||
|
||||
### Dynamische validatie
|
||||
|
||||
- Aandrijving (REQ-W-4[MH] in PvE)
|
||||
- Draaicirkel (REQ-W-8[MH] in PvE)
|
||||
- Stabilisatie tot hellingshoek 5 graden (REQ-S-2[SH] in PvE)
|
||||
|
||||
### Integratie validatie
|
||||
|
||||
Een volledig rollend sturen d stabiliserend voertuig test. (REQ-S-1[MH], REQ-W-2[MH] en REQ-W-3[SH] in PvE)
|
||||
|
||||
223
markdown/projectdocument.md
Normal file
@@ -0,0 +1,223 @@
|
||||
---
|
||||
tags: kladjes, elektro, elektro/hr, elektro/hr/pee51
|
||||
---
|
||||
|
||||
[parent](/tPb3Up1fQEuZ86yrJSkYRQ)
|
||||
|
||||
# Superlight Personal Carier (SPC)
|
||||
|
||||
## inhoudsopgaven
|
||||
|
||||
[toc]
|
||||
|
||||
## Inleiding
|
||||
|
||||
Het SPC-project is een project vanuit de opleiding Automotive. Het doel is om een lichtgewicht, zelf stabiliserend persoonsvoertuig te ontwikkelen dat als een testplatform kan dienden. Bij dit test platform is het doel om een kleinere milieu vriendelijkere manier van persoonlijk transport dan een 'gewone' auto.
|
||||
|
||||
## Analyse
|
||||
|
||||
Niels Groningen - de opdracht gever - wil graag een test platform hebben. Het is lastig harde eisen te stellen aan dit testplatform, aangezien nog niet exact bekend is wat er getest op gaat worden. Het is de bedoeling dat er verschillen soorten testen op gedaan kunnen worden.
|
||||
|
||||
Voor dit project zijn er wel duidelijke eisen nodig zodat het duidelijk is dat we allebei hetzelfde idee hebben hoe die moet werken. Hierom is er dus doorgevraagd en zijn een aantal richtlijnen uitgekomen.
|
||||
|
||||
- Het voertuig moet een redelijke actieradius hebben, zoals bijvoorbeeld comfortabel vanaf Amsterdam naar Rotterdam kunnen rijden.
|
||||
- Het moet over de snelweg kunnen in theorie, maar hoeft niet aan alle regelgevingen te voldoen.
|
||||
- Er moet actieve stabilisatie op komen.
|
||||
- Beide wielen moeten gestuurd en aangedreven worden.
|
||||
- Het voertuig moet zo licht mogelijk zijn, zonder te veel weg te nemen van gebruikers vriendelijkheid voor de bestuurder.
|
||||
- Het voertuig moet uiteindelijk semi-automatisch kunnen rijden.
|
||||
|
||||
Op basis van deze richtlijnen is er een Pakket van Eisen opgesteld, hierna is er nog wat meer heen en weer gegaan om de eisen wat te fine tunen.
|
||||
|
||||
Het resulterende Pakket van Eisen is te vinden in de bijlagen.
|
||||
|
||||
## Architectuur
|
||||
|
||||
Het systeem heeft verschillende onderdelen die te zien zijn in het DFD1, elk onderdeel zorgt ervoor dat het voertuig kan rijden en een stapje verder kan zetten in het einddoel, het vervoeren van een persoon.
|
||||
|
||||
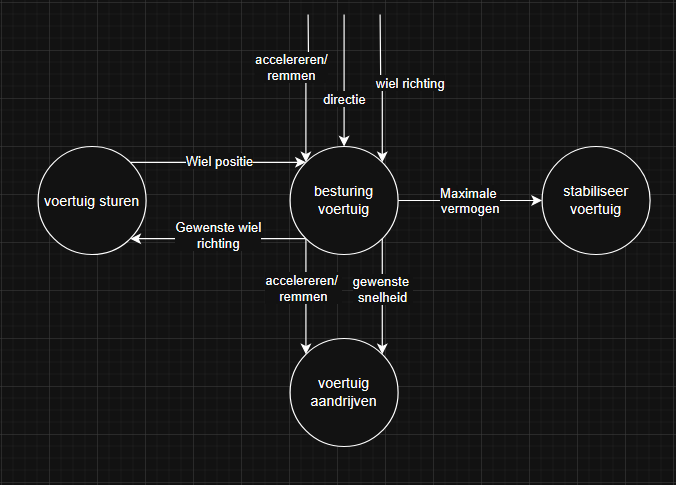
|
||||
|
||||
### VCU
|
||||
|
||||
De Vehicle Control Unit zorgt voor veel onderdelen in het systeem waaronder het sturen van het voertuig en aangeven hoe snel de gebruiker wil, die geeft een signaal naar de stabilisatie en de motor.
|
||||
|
||||
REQ-C-1[MH]: het voertuig wordt bestuurd doormiddel van een elektronisch input, zoals een joystick, die bedienbaar is door de bestuurder.
|
||||
|
||||
REQ-C-2[MH]: er is een noodstop aanwezig.
|
||||
|
||||
### Stabilisatie
|
||||
|
||||
De stabilisatie is nodig zodat we het voertuig niet hoeven te verlaten als we stil moeten staan, dit is omdat de bestuurder ingecapsuleerd is in het voertuig. De VCU geeft een data signaal aan de Stabilisatie hoeveel vermogen die mag gebruiken.
|
||||
|
||||
REQ-S-1[MH]: Het voertuig wordt actief gestabaliseerd
|
||||
|
||||
REQ-S-2[SH]: Het voertuig kan uit zichzelf weer recht komen te zitten vanaf een roll hoek van 5 graden
|
||||
|
||||
### aandrijving
|
||||
|
||||
De aandrijving zorgt ervoor dat het voertuig zichzelf kan voortbewegen op genoeg snelheid zodat er veilig op de weg gereden kan worden. de VCU stuurt een signaal voor accelereren of remmen.
|
||||
|
||||
REQ-A-4[MH]: Het voertuig is ontworpen zodat de maximale snelheid 60 kilometer per uur of sneller is.
|
||||
|
||||
60 km/h is de minimale snelheid voor op de snelweg.
|
||||
|
||||
REQ-A-5[SH]: Het voertuig is ontworpen zodat die 150 kilometer per uur of sneller kan rijden in ideale omstandigheden.
|
||||
|
||||
REQ-A-6[SH]: Het voertuig is ontworpen zodat die 100 kilometer actieradius of meer kan bereiken in ideale omstandigheden.
|
||||
|
||||
De opdracht gever wil graag tussen Amsterdam van Rotterdam kunnen rijden.
|
||||
|
||||
REQ-A-7[CH]: Het voertuig is ontworpen zodat die 250 kilometer actieradius of meer kan bereiken in ideale omstandigheden.
|
||||
|
||||
|
||||
## Vehicle Control unit (VCU)
|
||||
|
||||
De VCU is een belangrijk onderdeel van het systeem, hiermee kunnen we het voertuig in een richting sturen en vooruit bewegen. De belangrijkste keuzes hierin zijn in welke taal we willen gaan programmeren en wat voor soort microcontroller we willen. De reden hiervoor is zodat de volgende team makkelijker kan omgaan met de code en het systeem makkelijker kunnen uitbreiden. Het makkelijkst is dan om met de Arduino IDE en framework verder te gaan, omdat het een bekent en veel gedocumenteerd systeem is waar je veel over kan vinden op internet tegenover veel andere IDE's, programmeertalen en microcontrollers. Verder moet het ook draadloos verbinding kunnen maken met een console controller zodat de volgende teams eventueel een andere keuze kunnen maken hoe ze willen sturen. Daarom hebben we voor de ESP32 gekozen omdat het alles aantikt met een gezond aantal GPIO pinnen.
|
||||
|
||||
### Actuator
|
||||
|
||||
De actuator hebben we nodig om de wielen in een richting te kunnen sturen. Volgens Max Kappert(student automotive engineer) hebben we de volgende parameters gekregen die we nodig hebben om het voertuig te kunnen sturen.
|
||||
|
||||
| Parameter | Waarde | Eenheid | Opmerking |
|
||||
|--------------------------------|-------------|------------|----------------------|
|
||||
| Voertuigspanning | 12 - 14 | $V_{DC}$ | typisch voor auto-VCU's |
|
||||
| Stuurspanningdemperkle | 0 - 5 | $V_{DC}$ | naloge regeling |
|
||||
| PWM-signaal frequentie | 25000 - 30000 | $Hz$ | Typische range voor aansturing |
|
||||
| PWM duty cycle | 10 - 90 | $\%$ | $10%$: minimale demping, $90%$: maximale demping^[demping voor de ophanging via de interne actuator demper] |
|
||||
| Stroomverbruik klep | 0.5 - 2 | $A$ | Afhankelijk van de interne weerstand |
|
||||
| Wielsnelheid | 0 - 250 | $km/h$ | Meet snelheid per wiel |
|
||||
| Karrosserieversnelling | -3 tot +3 | $g$ | Laterale en verticale versnellingen |
|
||||
| Axiale potentiometer (veerweg) | 0 - 50 | $mm$ | Meet veeruitslag |
|
||||
| Temperatuur werkbereik | -40 tot +85 | $^\circ C$ | Automobielstandaard |
|
||||
|
||||
Voor de Actuator is er een keuze gemaakt voor CDC (Continuous Damping Control) demper van SACHS, Maar vanwege de besteltijden van dit soort componenten kunnen we dit niet gebruiken. Daarom gebruiken we een actuator die er al staat, de A0-01/M van S-LINE. om de actuator te besturen gebruiken we een motordriver, de MDD20A. Dit is omdat we het al hebben en werkt met de huidige actuatoren en voldoende de parameters van de actuatoren behaald, daarom hebben we besloten om niet een nieuwe te kopen of te ontwerpen. Om ervoor te zorgen dat de actuatoren niet te ver gaan gebruiken we de AS5600 magnetic encoder. Dit is omdat de encoder een absoluut positie meegeeft en daarom voor minder problemen zorgt als het voertuig opnieuw opstart.
|
||||
|
||||
## Stabilisatie
|
||||
|
||||
Voor de Stabilisatie is er een motor driver ontworpen. De specificaties van deze zijn groten deels gebaseerd op specifieke motor. Samen met Automotive is deze uitgekozen.
|
||||
|
||||
### De Motor
|
||||
|
||||
Het is er een die gevonden is op Aliexpress, niet een heel erg betrouwbare verkoper, maar we kunnen geeb andere geschikte vinden voor een redelijke prijs. Deze motor kan de kracht net niet continu aan, maar wel voor korte duur. De snelheid is wel iets ingeperkt ten opzichte van de berekende $1000 rpm$ dat nodig is, deze kan maar tot $875 rpm$. Dit is de reden geweest dat we geen motor gaan inkopen, maar een testen met een motor uit de voorraad. Deze zal waarschijnlijk niet voldoende vermogen kunnen halen, maar we kunnen wel testen of het concept werkt voordat er grote bedragen uitgegeven gaan worden aan een geschikte motor.
|
||||
|
||||
De specificaties van de motor:
|
||||
|
||||
- $K_T = 0.15 Nm/A$ - motor koppel constante
|
||||
- $I_{noload} = 3.52 A$ - Stroom verbruik bij geen koppel
|
||||
- $K_v = 69 rpm/V$ - motor snelheidsconstante
|
||||
- $V_{th} = 598 mV$ - threshold voltage
|
||||
- $I_{max} = 78.5 A$ - maximaal stroom verbruik voor onze applicatie ($11.2Nm$ met 1:4 gearbox)
|
||||
- $U_{max} = 64 V$ - maximaal spanning benodigd voor onze applicatie
|
||||
|
||||
berekeningen voor deze waardes staan in het Detailontwerp Stabilisatie in hoofdstuk [Motor Keuze](#motor-keuze) (zie bijlagen)
|
||||
|
||||
> Er is helaas iets fout gegaan bij de berekeningen die eerder gedaan zuhb om de specificaties vast te stellen. Er is per ongeluk met $25 Nm$ gerekent i.p.v. $45 Nm$. Dit betekent dat de motor driver is ontworpen voor $50 A$ i.p.v. $80A$. Dit kan opgelost worden door een motor gearbox combie die te vinden is met $50A$ maar met een hogere spanning het vermogen haalt. Er is veel ruimte aan spanning, dus dit zal geen groot probleem moeten zijn.
|
||||
|
||||
### Motor Driver
|
||||
|
||||
#### specificaties
|
||||
|
||||
- De drijver moet minimaal $64 V$ aan kunnen, met voorkeur van meer dan $120 V$ [^1]
|
||||
|
||||
De $120V$ komt van de vorige groep die aan dit project hebben gewerkt. Dit is de spanning van de accu die zij hadden gebruikt om dingen mee te berekenen. Er is nog geen besluit wat deze spanning werkelijk gaat worden.
|
||||
|
||||
- De drijver moet minimaal $50 A$ continu kunnen leveren (wat eigenlijk $80 A$ had moeten zijn) [^1]
|
||||
- Maakt gebruik van Field Oriented Control, om het volledige vermogen te kunnen halen vanaf stilstand.
|
||||
- De hoek van het voertuig moet gemeten worden.
|
||||
- Er is een regel loop tussen de hoek sensor en de kracht van de motor.
|
||||
- Er is een SPI-client connector waarmee verschillende instellingen ingesteld mee kan worden, waaronder het maximaal vermogen.
|
||||
|
||||
[^1]: Er wordt tot $50 V$ getest, voor deze waardes wordt het ontworpen, maar niet tot het limiet getest.
|
||||
|
||||
Met deze specificaties is het erg lastig om een motor driver voor te vinden. Zo lastig dat - zonder een bedrijf één te laten ontwerpen - we er geen gevonden hebben. Hierom is gekozen om zelf een motor driver te ontwerpen.
|
||||
|
||||
De SPI-client is afgesproken met de andere elektrotechnische ingenieurs als algemeen communicatie protocol nadat was besloten om een eigen motor driver te ontwerpen.
|
||||
|
||||
#### Ontwerp
|
||||
|
||||
Het ontwerp is gemaakt door Finley, zij heeft op haar stage al een motor driver ontworpen. Hier heeft ze heel veel geleerd over het ontwerpen van een motor driver. Hier komt ook veel van de kennis vandaan. Deze motordriver is niet gebaseerd op die motor driver, deze kan maar $3A$ aan, dus compleet opnieuw beginnen is makkelijker.
|
||||
|
||||
##### Half-bridges
|
||||
|
||||
De motor is een BLDC motor de volledige naam is een permanent magneet borstelloze 3 fase synchrone motor. Dit betekent dat er permanente magneten in zitten, geen borstels, aangestuurd met 3 fase en synchrone draait met deze 3 fases.
|
||||
|
||||
De motor driver wordt gevoed van een accu, dus DC. Om deze synchrone 3 fases te genereren zijn drie half-brdiges nodig. Een voor elke fase.
|
||||
|
||||
Voor de FET's voor deze Half-bridges is gekozen voor de EPC2307, Dit zijn GaNFET's in tegenstelling to de vaker gebruikte MOSFET's. MOSFET fabrikanten hebben een gewoonte om de maximale stroom te berekenen met perfecte koeling. Dit is dus niet realistisch haalbaar. Om achter te komen wat wel haalbaar is is een thermal analyses nodig, dit is grof weg gedaan voor een redelijk wat MOSFET's, maar geen enkel was geschik om de $50A$ te schakelen. EPC (Efiction Power Converter; de fabrikant van de EPC2307) is een van de weinige fabrikanten wel een realistisch beeld van de maximale stroom.
|
||||
|
||||
Om te bevestigen is een berekening vermaakt hoeveel de FET's aan vermogen verliezen in deze applicatie. Dit is gedaan met de volgende formule.
|
||||
|
||||
$$
|
||||
P_{loss} = I^2R_{DS(on)} + \frac{UIt}{2} \cdot 2f_s
|
||||
$$
|
||||
|
||||
$I$: stroom
|
||||
$U$: voedingsspanning
|
||||
$t$: schakeltijd
|
||||
$f_s$: de schakel frequentie
|
||||
|
||||
$U = 120V$, $I = 50A$ (uit specificaties motor driver)
|
||||
$t = 4 ns$ (berekent in simulatie)
|
||||
$f_s = 50 kHz$ (frequentie is gekozen omdat die buiten menselijk gehoor licht)
|
||||
|
||||
$P_{loss} = 26.2 W$.
|
||||
|
||||
Deze formule is erg pessimistisch, deze gaat uit van $100\%$ PWM terwel de uitgang een sinus is dus gemiddeld is het altijd $50\%$ en de schakelverliezen worden ook overschat. Voor meer informatie over deze berekening zie bijlagen Detailontwerp Stabilisatie hoofdstuk [Verliezen in de FET](#verliezen-in-de-fet)
|
||||
|
||||
> Voor meer informatie over hoe de vermogens filtering is gedaan zie bijlagen Detailontwerp Stabilisatie hoofdstuk [Power Filtering](#power-filtering)
|
||||
|
||||
##### Sensoren
|
||||
|
||||
Er zijn drie sensoren nodig, stroom meting, positie van de motor en de hoek van het voertuig.
|
||||
|
||||
###### stroom meting
|
||||
|
||||
De stroom meting wordt gedaan met de ACS724xLCTR-50AB. Dit is een stroom meting IC die van $-50A$ tot $+50A$ kan meten. Deze komt tussen de motor en de uitgang van de half-bridges. Het is ook mogelijk om aan de lage FET in de half-bridge te meten met een shunt, maar omdat het nog niet heel duidelijk is hoe het FOC algoritme werkt, lijkt dit een makkelijkere manier om het algoritme te implementeren.
|
||||
|
||||
Er is niet gekozen voor een shunt met een versterker, omdat er $200V$ op deze uitgang komt te staan. De versterkers die dit aankunnen zijn erg duur en de ACS724xLCTR-50AB wordt dan een goedkopere optie.
|
||||
|
||||
###### Hoek van de motor
|
||||
|
||||
de motor hoek is nodig voor FOC. Hoe nauwkeuriger deze sensor is hoe efficiënter FOC wordt. De AS5600 is zowel makkelijk te monteren als nauwkeurig zonder dat die elke keer bij het opstarten hoeft gekalibreerd hoeft te worden.
|
||||
|
||||
> Meer informatie waarom deze keuze is gemaakt, zie de bijlagen Detailontwerp Stabilisatie hooftstuk Encoder
|
||||
|
||||
###### Hoek van het voertuig
|
||||
|
||||
Een MEMS Gyroscoop kan verandering in de hoek meten, deze is erg snel hierin maar bij afwijking verliest die de nul positie. Hiervoor is een combinatie gekozen met een MEMS-acceleratiemeter. Deze kan met de zwaartekracht meten zolang het voertuig niet te veel beweerd.
|
||||
|
||||
Om het makkelijk te maken is er gekozen voor de M5Stack IMU Pro Mini. Deze is makkelijk te monteren, omdat die al in een behuizing zit met montage gaten. Deze sensor komt met de BMI270 van Bosch die zowel een MEMS-acceleratiemeter als gyroscoop heeft.
|
||||
|
||||
> Meer informatie warom deze keuze is gemaakt, zie bijlagen Detailontwerp Stabilisatie hoofdstuk [Hoek Sensor](#hoek-sensor)
|
||||
|
||||
#### Productie en Testen Motor Driver
|
||||
|
||||
De PCB en stencil zijn geproduceerd door JLCPCB en de componenten zijn geplaatst en in de reflow oven gegaan in het SMD-lab op Accademiplein.
|
||||
|
||||
Na dat die uit de over kwam zijn er een aantal soleer balletjes weggehaald, twee soldeer bruggen weg gehaald bij een van de gate driver IC's en de microcontroller opnieuw met de hand erop geplast. De microcontroller had te veel tin op de grondpad aan de onderkant, waardoor deze omhoog kwam en de pinnen aan de zijkant boven de PCB zweefde onder contact.
|
||||
|
||||
Tot hoever er getest is werkt alles, de FET's schakelen en de PWM wordt correct gegenereerd. Helaas heb ik geen foto's van de scope kunnen maken, ik had beide handen vol met de probes en het lukte me niet om met mijn neus de scope te triggeren. Ik ga maandag 23 juni iemand om hulp vragen terwel ik verder ga testen.
|
||||
|
||||
## Project Verloop
|
||||
|
||||
Aan het begin was het vooral lastig om duidelijk te maken wat de vereisten van beide opleidingen en tot een format te komen van het Plan van Aanpak en Pakket van eisen die voor beide opleidingen voldoet. Het is ons niet gelukt om tot een enkel Pakket van Eisen te komen, bij Automotive moet het in een Exel bestand. Dit is alleen lastig om te exporteren naar bestand dat geschik is om te kunnen ondertekenen. Daarbij is het ook lastig om er onderbouwing van de eisen bij te zetten, dit is niet nodig voor Automotive.
|
||||
|
||||
We hebben uiteindelijk ons eigen Pakket van Eisen gemaakt op onze manier en deze vertaalt naar een Exel bestand voor Automotive.
|
||||
|
||||
Na deze twee documenten zijn er weinig 'conflicten' geweest tussen de eisen van Elektrotechniek en Automotive.
|
||||
|
||||
Een van de projectleden, Mohamed, is erg weinig komen opdagen. En heeft de drie waarschuwingen gekregen dat volgens de samenwerkingsovereenkomst dat wij hebben opgesteld en getekend (inc. Mohamed), waar na die uit de groep gezet kan worden. i.p.v. dit direct te doen hebben wij als groep samen met Joris Straver een gesprek gehad, wat er toe heeft geleden dat die de groep heeft verlaten. Rond deze tijd had Gryvon ook aangegeven dat die de groep verliet wegen te veel stress met andere vakken.
|
||||
|
||||
Vanaf school week 4.1 waren we totaal nog maar met 5 personen i.p.v. 7. Dit heeft er tot geleid dat de aandrijving van de wielen hebben laten vallen en de motor driver voor de stabilisatie wat is uitgelopen.
|
||||
|
||||
## bijlagen
|
||||
|
||||

|
||||
|
||||

|
||||
|
||||

|
||||
|
||||

|
||||
|
||||

|
||||
53
markdown/softwareontwerp_stabilisatie.md
Normal file
@@ -0,0 +1,53 @@
|
||||
---
|
||||
tags: kladjes, elektro, elektro/hr, elektro/hr/pee51
|
||||
---
|
||||
|
||||
[parent](/tPb3Up1fQEuZ86yrJSkYRQ)
|
||||
|
||||
# Softwareontwerp Sabilisatie
|
||||
|
||||
## inleiding
|
||||
|
||||
|
||||
## FoC library
|
||||
|
||||
In C zijn er niet veel librarys voor FOC, de enige goede library die we hebben
|
||||
gevonden is [SimpleFOCproject](https://www.simplefoc.com/). Dit komt er in
|
||||
debuurd van een framework. In de video van de homepagina worden een aantal
|
||||
gemeenschaps projecten laten zien, waarvan meerdere een reactiewiel voor
|
||||
sabilisatie laat zien. Dit belooft veel goeds, toch is er gekozen om een andere
|
||||
library te kiezen. Het goed implementeren van een regel kring met de IMU vraagd
|
||||
veel kennis van hoe dit 'framework' werkt. Onze implementatie is niet exact het
|
||||
zelfde als die van deze gemeenschaps projecten. Wij hebben dus de kennis nogdig
|
||||
om deze code aan te passen.
|
||||
|
||||
Er is gekozen om te werken met de [Rust library FOC](https://lib.rs/crates/foc).
|
||||
Deze library is alleen een implementatie voor het FOC algaritme, wadoor er meer
|
||||
flexibilitijd is hoe het systeem verder werkt. Dit kan dus ook verder
|
||||
geoptimaliseerd worden en meer ge configureerd. dat tweede is de grootste reden
|
||||
warom voor deze library is gekozen. Er is behoefte aan een systeem dat aangepast
|
||||
kan worden naar wat later beter blijkt te zijn.
|
||||
|
||||
## Rust op RP2040
|
||||
|
||||
Rust voor microcontrollers is nog in een sooft alpha versie. Het werkt voor het
|
||||
grootste deel, maar hier en daar zijn nog wat beperkingen. Vrijwel al deze
|
||||
beperkingen hebben een workaround. Het groote voordeel is dat er een 'officele'
|
||||
standaard is voor het HAL interface^[embeded-hal: [https://docs.rs/embedded-hal](https://docs.rs/embedded-hal)].
|
||||
Dit maakt zorgd er voor dat er veel librarys voor IC's beschikbaar zijn die
|
||||
gewoon werken.
|
||||
|
||||
## Async
|
||||
|
||||
De standaard async funtionalitijd in rust werkt nog niet voor
|
||||
microcontrollers^[[https://www.youtube.com/watch?v=H7NtzyP9q8E](https://www.youtube.com/watch?v=H7NtzyP9q8E)].
|
||||
Hier zijn wel alternative librarys voor^[[https://arewertosyet.com/](https://arewertosyet.com/)],
|
||||
Embassy^[[https://embassy.dev/](https://embassy.dev/)] en RTIC^[[https://rtic.rs](https://rtic.rs)]
|
||||
zijn de twee die het meest genoemd worden. Embassy ziet er wat eenvoudiger uit
|
||||
als RTIC, daarvoor is ook gekozen om te gebruiken.
|
||||
|
||||
## AS5600
|
||||
|
||||
Er wordt gebruik gemaakt de AS5600 library van Rafael Bachmann^[[https://github.com/barafael/as5600-rs](https://github.com/barafael/as5600-rs)].
|
||||
|
||||
##
|
||||
158
markdown/unittest_stabilisatie.md
Normal file
@@ -0,0 +1,158 @@
|
||||
---
|
||||
tags: kladjes, elektro, elektro/hr, elektro/hr/pee51
|
||||
---
|
||||
|
||||
[parent](/tPb3Up1fQEuZ86yrJSkYRQ)
|
||||
|
||||
## Unit Testen Stabilisatie
|
||||
|
||||
### Voedingen
|
||||
|
||||
#### Benodigdheden
|
||||
|
||||
- 12V voeding
|
||||
|
||||
#### Procedure
|
||||
|
||||
1. snel de voeding in op 12V met een stroom berensing van 50 mA
|
||||
2. sluit de 12V voeding aan op de 12V en GND ingnangen op de driver
|
||||
3. meet de uitgangen van de twee voedingen, vul de tabel hieronder in
|
||||
|
||||
| | $5V$ | $12V$ |
|
||||
| -------- | ------:| -------:|
|
||||
| minimaal | $4.5V$ | $11.5V$ |
|
||||
| maximaal | $5.5V$ | $12.5V$ |
|
||||
| gemeeten | | |
|
||||
|
||||
Geslaagd:
|
||||
|
||||
opmergingen:
|
||||
|
||||
### Microcontroller
|
||||
|
||||
#### Benodigdheden
|
||||
|
||||
- 12V voeding als de voedingen werken, anders met een 5V en 3.3v voeding
|
||||
- computer met Arduino IDE geinstaleerd
|
||||
- USB B kabel naar de computer
|
||||
- ledje met bijhoren de weerstand voor 3.3V
|
||||
|
||||
#### Procedure
|
||||
|
||||
1. sluit een ledje aan op een van de GPIO pinnen
|
||||
2. snel de voeding in op 12V met een stroom berensing van 150 mA
|
||||
3. sluit de 12V voeding aan op de 12V en GND ingnangen op de driver
|
||||
4. sluit de USB kabel aan op de computer (dit is veilig omdat de USB alleen verbonden is met ground, de V+ is floating)
|
||||
5. upload een blinky voorbeeld progamma met de GPIO ingesteld van de led
|
||||
6. bekijk of het lidje knipperd
|
||||
|
||||
Geslaagd:
|
||||
|
||||
opmergingen:
|
||||
|
||||
### Half-brug
|
||||
|
||||
#### Benodigdheden
|
||||
|
||||
- als de microcontoller werkt:
|
||||
- 12V voeding als de voedingen werken, anders met een 5V en 3.3v voeding
|
||||
- 30V voor V Motor
|
||||
- computer met Arduino IDE geinstaleerd
|
||||
- USB B kabel naar de computer
|
||||
- ocsiloscoop
|
||||
- zo niet:
|
||||
- 10V voor V motor
|
||||
- signaal generator met twee kanalen
|
||||
- ocsioscoop
|
||||
|
||||
#### procedure
|
||||
|
||||
1. sluit de ociloscoop aan op een van de uitgangen van de drijver (er komt 30V op te staan, beruik de juiste probe; geen juiste probe bij de hand, zelt de voeding voor V motor wa lager)
|
||||
2. snel de voeding in op 12V met een stroom berensing van 150 mA
|
||||
3. sluit de 12V voeding aan op de 12V en GND ingnangen op de driver
|
||||
4. sluit de USB kabel aan op de computer (dit is veilig omdat de USB alleen verbonden is met ground, de V+ is floating)
|
||||
5. upload een test progamma die de PWM aansuurt voor de FET's
|
||||
- de PWM per half bridge zijn aangesloten op de a en b uitganen van 1 timer per half brug. zorg dat een van de uitput geinverteerd is en de twee vergeleijk waardes zo zijn zodat er een korte dead time is. ze mogen nooit tegerlijk hoog zijn!
|
||||
6. bekijk het signaal op de osciloscoop
|
||||
7. herhaal de test voor alle drie de half bruggen
|
||||
|
||||
resultaat:
|
||||
|
||||
- brug a:
|
||||
- brug b:
|
||||
- brug c:
|
||||
|
||||
opmerkingen:
|
||||
|
||||
### IMU
|
||||
|
||||
#### benodigdheden
|
||||
|
||||
- een microcontroller met I2C (kan de motoro driver zelf zijn)
|
||||
- computer met Arduino IDE geinstaleerd
|
||||
- USB B kabel naar de computer
|
||||
|
||||
#### procedure
|
||||
|
||||
1. sluit de IMU aan op de motor driver
|
||||
2. snel de voeding in op 12V met een stroom berensing van 150 mA
|
||||
3. sluit de 12V voeding aan op de 12V en GND ingnangen op de driver
|
||||
4. sluit de USB kabel aan op de computer (dit is veilig omdat de USB alleen verbonden is met ground, de V+ is floating)
|
||||
5. upload een blinky voorbeeld progamma met de GPIO ingesteld van de led
|
||||
6. bekijk de serial plotter terwel je de IMU draait.
|
||||
|
||||
Geslaagd:
|
||||
|
||||
opmergingen:
|
||||
|
||||
### stroom meting
|
||||
|
||||
#### benodigdheden
|
||||
|
||||
- 12V voeding (of 5V bij beperking van beschikbaare voedingen)
|
||||
- voeding die 50A kan leveren (of zoveel mogenlijk) voor V motor
|
||||
- bij voorkeur een load die de $50A_{DC}$ kan op nemen, ander kan de uitgang korgesloten worden als de voeding dat toestaat.
|
||||
- multimeter
|
||||
- computer met Arduino IDE geinstaleerd
|
||||
- USB B kabel naar de computer
|
||||
|
||||
#### procedure
|
||||
|
||||
1. sluit de load aan op deen van de uitgangen van de motor driver
|
||||
2. snel de voeding in op 12V met een stroom berensing van 150 mA
|
||||
3. sluit de 12V voeding aan op de 12V en GND ingnangen op de driver
|
||||
4. sluit de USB kabel aan op de computer (dit is veilig omdat de USB alleen verbonden is met ground, de V+ is floating)
|
||||
5. upload een programma die alle high side fet's dicht zet en de low side fet's open
|
||||
6. sluit de voeding voor V motor aan
|
||||
7. meet uitgang van de stroom meeting
|
||||
8. zet de v motor voeding uit en verlaats de load naar een andere uitgang
|
||||
9. zet de voeding weer aan en meet de stroom meting
|
||||
10. herhaal dit voor de laaste uitgang
|
||||
|
||||
TODO: add meet table
|
||||
|
||||
Geslaagd:
|
||||
|
||||
opmergingen:
|
||||
|
||||
### encoder
|
||||
|
||||
#### benodigdheden
|
||||
|
||||
- een microcontroller met I2C (kan de motoro driver zelf zijn)
|
||||
- computer met Arduino IDE geinstaleerd
|
||||
- USB B kabel naar de computer
|
||||
|
||||
#### procedure
|
||||
|
||||
1. sluit de Encoder aan op de motor driver
|
||||
2. snel de voeding in op 12V met een stroom berensing van 150 mA
|
||||
3. sluit de 12V voeding aan op de 12V en GND ingnangen op de driver
|
||||
4. sluit de USB kabel aan op de computer (dit is veilig omdat de USB alleen verbonden is met ground, de V+ is floating)
|
||||
5. upload een voorbeeld progamma voor de encoder.
|
||||
6. bekijk de serial plotter terwel je de magneer van de encoder draait
|
||||
|
||||
Geslaagd:
|
||||
|
||||
opmergingen:
|
||||
|
||||
50
markdown/unittest_stuursysteem.md
Normal file
@@ -0,0 +1,50 @@
|
||||
---
|
||||
tags: kladjes, elektro, elektro/hr, elektro/hr/pee51
|
||||
---
|
||||
|
||||
[parent](/tPb3Up1fQEuZ86yrJSkYRQ)
|
||||
|
||||
# unit testen Stuur systeem
|
||||
|
||||
## unit test controller
|
||||
|
||||
- computer met Arduino IDE geinstaleerd
|
||||
- een USB-C kabel aangesloten van de microcontroller naar een computer
|
||||
- een controller om het voertuig mee te besturen
|
||||
|
||||
1. Upload het programma naar de esp32
|
||||
2. pair de controller via bluetooth met de esp32
|
||||
3. check voor de waardes op je computer
|
||||
4. druk knoppen in en beweeg joysticks
|
||||
5. kijk of er waardes binnenkomen.
|
||||
|
||||
de test is geslaagd wanneer alle knoppen consistent een waarde terug kunnen sturen naar de terminal van de Arduino IDE
|
||||
|
||||
|
||||
## unit test Actuator
|
||||
|
||||
- voeding die minimaal 24 volt aankan
|
||||
- computer met Arduino IDE geinstaleerd
|
||||
- een USB-C kabel aangesloten van de microcontroller naar een computer
|
||||
- een controller om het voertuig mee te besturen
|
||||
|
||||
1. sluit de voeding aan op de motorcontroller met 24 volt en een stroombegrensing van 2A
|
||||
2. verbind de PWM en DIR pinnen tussen de eps32 en motorcontroller
|
||||
3. pair de controller met de esp32
|
||||
4. beweeg de linker joystick van links naar rechts.
|
||||
5. check de reactie van het wiel
|
||||
|
||||
de test is geslaagd wanneer de controller het wiel links en rechts kan draaien en het wiel stopt in de aangegeven richting en niet te zijn eigen grens overschrijt.
|
||||
|
||||
## integratie test VCU
|
||||
|
||||
- computer met Arduino IDE geinstaleerd
|
||||
- een USB-C kabel aangesloten van de microcontroller naar een computer
|
||||
- een controller om het voertuig mee te besturen
|
||||
|
||||
1. sluit de de motor en de stabilisatie units met de VCU
|
||||
2. pair de controller met de esp32
|
||||
3. beweeg de rechter joystick omhoog en omlaag
|
||||
4. check de reactie met het wiel en de stabilisator
|
||||
|
||||
de test is geslaagd wanneer de controller de motor kan aansturen en de stabilisatie zijn vermogen kan varieren gebaseerd op het wiel
|
||||