This commit is contained in:
@@ -45,12 +45,8 @@ REQ-X-X[XX]
|
||||
|
||||
**REQ-A-3[MH]: Het voertuig heeft een totale breedte van 60 centimeter of minder.**
|
||||
|
||||
> niet ietsje breeder?
|
||||
|
||||
**REQ-A-4[MH]: Het voertuig is ontworpen[^ontwerp] zodat de maximale snelheid 60 kilometer per uur of sneller is.**
|
||||
|
||||
> in welke omstandigheden.
|
||||
|
||||
60 km/h is de minimale snelheid voor op de snelweg^[[https://www.rijksoverheid.nl/onderwerpen/wegen/vraag-en-antwoord/wat-is-de-minimumsnelheid-voor-het-wegverkeer](https://www.rijksoverheid.nl/onderwerpen/wegen/vraag-en-antwoord/wat-is-de-minimumsnelheid-voor-het-wegverkeer)].
|
||||
|
||||
**REQ-A-5[SH]: Het voertuig is ontworpen[^ontwerp] zodat die 150 kilometer per uur of sneller kan rijden in ideale omstandigheden[^omstandig].**
|
||||
@@ -108,6 +104,3 @@ De opdracht gever wil graag tussen Amsterdam van Rotterdam kunnen rijden.
|
||||
**REQ-C-1[MH]: het voertuig wordt bestuurd doormiddel van een elektronisch input, zoals een joystick, die bedienbaar is door de bestuurder.**
|
||||
|
||||
**REQ-C-2[MH]: er is een noodstop aanwezig.**
|
||||
|
||||
> TODO: miss nog iets over wat die noodstop doet
|
||||
> hoe reageerd het stuur meganisme hierop
|
||||
|
||||
@@ -4,33 +4,29 @@ tags: kladjes, elektro, elektro/hr, elektro/hr/pee51
|
||||
|
||||
[parent](/tPb3Up1fQEuZ86yrJSkYRQ)
|
||||
|
||||
# Superlight Persian Carier (SPC)
|
||||
# Superlight Personal Carier (SPC)
|
||||
|
||||
## inhoudsopgaven
|
||||
|
||||
[toc]
|
||||
|
||||
## Project Verloop
|
||||
## Inleiding
|
||||
|
||||
Aan het begin was het vooral lastig om duidelijk te maken wat de vereisten van beide opleidingen en tot een format te komen van het Plan van Aanpak en Pakket van eisen die voor beide opleidingen voldoet. Het is ons niet gelukt om tot een enkel Pakket van Eisen te komen, bij Automotive moet het in een Exel bestand. Dit is alleen lastig om te exporteren naar bestand dat geschik is om te kunnen ondertekenen. Daarbij is het ook lastig om er onderbouwing van de eisen bij te zetten, dit is niet nodig voor Automotive.
|
||||
Het SPC-project is een project vanuit de opleiding Automotive. Het doel is om een lichtgewicht, zelf stabiliserend eenpersoonsvoertuig te ontwikkelen dat als een testplatform kan dienden. Bij dit test platform is het doel om een kleinere milieu vriendelijkere manier van persoonlijk transport dan een 'gewone' auto.
|
||||
|
||||
We hebben uiteindelijk ons eigen Pakket van Eisen gemaakt op onze manier en deze vertaalt naar een Exel bestand voor Automotive.
|
||||
## Analyse
|
||||
|
||||
Na deze twee documenten zijn er weinig 'conflicten' geweest tussen de eisen van Elektrotechniek en Automotive.
|
||||
|
||||
Een van de projectleden, Mohamed, is erg weinig komen opdagen. En heeft de drie waarschuwingen gekregen dat volgens de samenwerkingsovereenkomst dat wij hebben opgesteld en getekend (inc. Mohamed), waar na die uit de groep gezet kan worden. i.p.v. dit direct te doen hebben wij als groep samen met Joris Straver een gesprek gehad, wat er toe heeft geleden dat die de groep heeft verlaten. Rond deze tijd had Gryvon ook aangegeven dat die de groep verliet wegen te veel stress met andere vakken.
|
||||
|
||||
Vanaf school week 4.1 waren we totaal nog maar met 5 personen i.p.v. 7. Dit heeft er tot geleid dat de aandrijving van de wielen hebben laten vallen en de motor driver voor de stabilisatie wat is uitgelopen.
|
||||
Meneer Groningen heeft als doel een voertuig voor zichzelf waarmee hij van Amsterdam naar Rotterdam kan rijden en minder druk te zetten op het huidig wegverkeer tegenover zijn auto.
|
||||
|
||||
## Architectuur
|
||||
|
||||
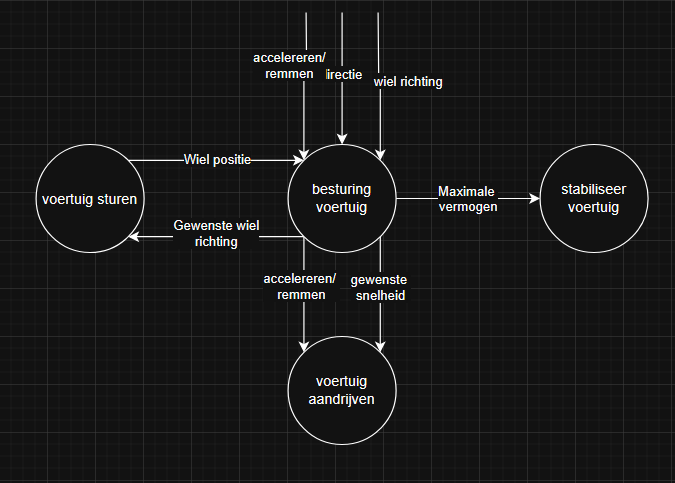
Het systeem heeft verschillende onderdelen die te zien zijn in het DFD1 hieronder, elk onderdeel zorgt ervoor dat het voertuig kan rijden en een stapje verder zetten in het einddoel het vervoeren van een persoon
|
||||
Het systeem heeft verschillende onderdelen die te zien zijn in het DFD1 hieronder, elk onderdeel zorgt ervoor dat het voertuig kan rijden en een stapje verder zetten in het einddoel het vervoeren van een persoon.
|
||||
|
||||
|
||||
|
||||
### VCU
|
||||
|
||||
de Vehicle Control Unit zorgt voor veel onderdelen in het systeem waaronder het sturen van het voertuig en aangeven hoe snel de gebruiker wil.
|
||||
De Vehicle Control Unit zorgt voor veel onderdelen in het systeem waaronder het sturen van het voertuig en aangeven hoe snel de gebruiker wil, hij geeft een signaal naar de stabilisatie en de motor.
|
||||
|
||||
REQ-C-1[MH]: het voertuig wordt bestuurd doormiddel van een elektronisch input, zoals een joystick, die bedienbaar is door de bestuurder.
|
||||
|
||||
@@ -38,7 +34,7 @@ REQ-C-2[MH]: er is een noodstop aanwezig.
|
||||
|
||||
### Stabilisatie
|
||||
|
||||
De stabilisatie is nodig zodat we het voertuig niet hoeven te verlaten als we stil moeten staan, dit is omdat de bestuurder ingecapsuleerd is in het voertuig.
|
||||
De stabilisatie is nodig zodat we het voertuig niet hoeven te verlaten als we stil moeten staan, dit is omdat de bestuurder ingecapsuleerd is in het voertuig. De VCU geeft een data signaal aan de Stabilisatie hoeveel vermogen die mag gebruiken.
|
||||
|
||||
REQ-S-1[MH]: Het voertuig wordt actief gestabaliseerd
|
||||
|
||||
@@ -46,11 +42,11 @@ REQ-S-2[SH]: Het voertuig kan uit zichzelf weer recht komen te zitten vanaf een
|
||||
|
||||
### aandrijving
|
||||
|
||||
de aandrijving zorgt ervoor dat het voertuig zichzelf kan voortbewegen op genoeg snelheid zodat er veilig op de weg gereden kan worden.
|
||||
De aandrijving zorgt ervoor dat het voertuig zichzelf kan voortbewegen op genoeg snelheid zodat er veilig op de weg gereden kan worden. de VCU stuurt een signaal voor accelereren of remmen.
|
||||
|
||||
REQ-A-4[MH]: Het voertuig is ontworpen zodat de maximale snelheid 60 kilometer per uur of sneller is.
|
||||
|
||||
in welke omstandigheden.
|
||||
In welke omstandigheden.
|
||||
|
||||
60 km/h is de minimale snelheid voor op de snelweg.
|
||||
|
||||
@@ -62,8 +58,28 @@ De opdracht gever wil graag tussen Amsterdam van Rotterdam kunnen rijden.
|
||||
|
||||
REQ-A-7[CH]: Het voertuig is ontworpen zodat die 250 kilometer actieradius of meer kan bereiken in ideale omstandigheden.
|
||||
|
||||

|
||||
|
||||
## Vehicle Control unit (VCU)
|
||||
|
||||
De VCU is een belangrijk onderdeel van het systeem, hiermee kunnen we het voertuig in een richting sturen en vooruit bewegen, de belangrijkste keuzes hierin zijn in welke taal we willen gaan programmeren en wat voor soort microcontroller we willen. De reden hiervoor is zodat de volgende team makkelijker kan omgaan met de code en het systeem makkelijker kunnen uitbreiden. het makkelijkst is dan om met de Arduino IDE en taal verder te gaan, omdat het een bekent en veel gedocumenteerd systeem is waar je veel over kan vinden op internet tegenover veel andere IDE's, programmeer talen en microcontrollers. verder moet het ook draadloos verbinding kunnen maken met een console controller zodat de volgende teams eventueel een andere keuze kunnen maken hoe ze willen sturen. Daarom hebben we voor de ESP32 gekozen omdat het alles aantikt met een gezond aantal GPIO pinnen.
|
||||
|
||||
### Actuator
|
||||
|
||||
De actuator hebben we nodig om de wielen in een richting te kunnen sturen volgens Max Kappert(student automotive engineer) hebben we de volgende parameters gekregen die we nodig hebben om het voertuig te kunnen sturen.
|
||||
|
||||
| Parameter | Waarde | Eenheid | Opmerking |
|
||||
|--------------------------------|-------------|------------|----------------------|
|
||||
| Voertuigspanning | 12 - 14 | $V_{DC}$ | typisch voor auto-ECU's |
|
||||
| Stuurspanningdemperkle | 0 - 5 | $V_{DC}$ | naloge regeling |
|
||||
| PWM-signaal frequentie | 1000 - 3000 | $Hz$ | Typische range voor aansturing |
|
||||
| PWM duty cycle | 10 - 90 | $\%$ | $0%$: minimale demping, $90%$: maximale demping |
|
||||
| Stroomverbruik klep | 0.5 - 2 | $A$ | Afhankelijk van de interne weerstand |
|
||||
| Wielsnelheid | 0 - 250 | $km/h$ | Meet snelheid per wiel |
|
||||
| Karrosserieversnelling | -3 tot +3 | $g$ | Laterale en verticale versnellingen |
|
||||
| Axiale potentiometer (veerweg) | 0 - 50 | $mm$ | Meet veeruitslag |
|
||||
| Temperatuur werkbereik | -40 tot +85 | $^\circ C$ | Automobielstandaard |
|
||||
|
||||
Voor de Actuator is er een keuze gemaakt voor CDC (Continuous Damping Control) demper van SACHS, Maar vanwege de besteltijden van dit soort componenten kunnen we dit niet gebruiken. Daarom gebruiken we een actuator die er al staat, de A0-01/M van S-LINE. om de actuator te besturen gebruiken we een motordriver, de MDD20A. Dit is omdat we het al hebben en werkt met de huidige actuatoren en voldoende de parameters van de actuatoren behaald, daarom hebben we besloten om niet een nieuwe te kopen of te ontwerpen. Om ervoor te zorgen dat de actuatoren niet te ver gaan gebruiken we de AS5600 magnetic encoder. Dit is omdat de encoder een absoluut positie meegeeft en daarom voor minder problemen zorgt als het voertuig opnieuw opstart.
|
||||
|
||||
## Stabilisatie
|
||||
|
||||
@@ -171,6 +187,18 @@ Na dat die uit de over kwam zijn er een aantal soleer balletjes weggehaald, twee
|
||||
|
||||
Tot hoever er getest is werkt alles, de FET's schakelen en de PWM wordt correct gegenereerd. Helaas heb ik geen foto's van de scope kunnen maken, ik had beide handen vol met de probes en het lukte me niet om met mijn neus de scope te triggeren. Ik ga maandag 23 juni iemand om hulp vragen terwel ik verder ga testen.
|
||||
|
||||
## Project Verloop
|
||||
|
||||
Aan het begin was het vooral lastig om duidelijk te maken wat de vereisten van beide opleidingen en tot een format te komen van het Plan van Aanpak en Pakket van eisen die voor beide opleidingen voldoet. Het is ons niet gelukt om tot een enkel Pakket van Eisen te komen, bij Automotive moet het in een Exel bestand. Dit is alleen lastig om te exporteren naar bestand dat geschik is om te kunnen ondertekenen. Daarbij is het ook lastig om er onderbouwing van de eisen bij te zetten, dit is niet nodig voor Automotive.
|
||||
|
||||
We hebben uiteindelijk ons eigen Pakket van Eisen gemaakt op onze manier en deze vertaalt naar een Exel bestand voor Automotive.
|
||||
|
||||
Na deze twee documenten zijn er weinig 'conflicten' geweest tussen de eisen van Elektrotechniek en Automotive.
|
||||
|
||||
Een van de projectleden, Mohamed, is erg weinig komen opdagen. En heeft de drie waarschuwingen gekregen dat volgens de samenwerkingsovereenkomst dat wij hebben opgesteld en getekend (inc. Mohamed), waar na die uit de groep gezet kan worden. i.p.v. dit direct te doen hebben wij als groep samen met Joris Straver een gesprek gehad, wat er toe heeft geleden dat die de groep heeft verlaten. Rond deze tijd had Gryvon ook aangegeven dat die de groep verliet wegen te veel stress met andere vakken.
|
||||
|
||||
Vanaf school week 4.1 waren we totaal nog maar met 5 personen i.p.v. 7. Dit heeft er tot geleid dat de aandrijving van de wielen hebben laten vallen en de motor driver voor de stabilisatie wat is uitgelopen.
|
||||
|
||||
## bijlagen
|
||||
|
||||

|
||||
|
||||
Reference in New Issue
Block a user