This commit is contained in:
@@ -12,21 +12,26 @@ tags: kladjes, elektro, elektro/hr, elektro/hr/pee51
|
||||
|
||||
## Inleiding
|
||||
|
||||
Het SPC-project is een project vanuit de opleiding Automotive. Het doel is om een lichtgewicht, zelf stabiliserend eenpersoonsvoertuig te ontwikkelen dat als een testplatform kan dienden. Bij dit test platform is het doel om een kleinere milieu vriendelijkere manier van persoonlijk transport dan een 'gewone' auto.
|
||||
Het SPC-project is een project vanuit de opleiding Automotive. Het doel is om een lichtgewicht, zelf stabiliserend persoonsvoertuig te ontwikkelen dat als een testplatform kan dienden. Bij dit test platform is het doel om een kleinere milieu vriendelijkere manier van persoonlijk transport dan een 'gewone' auto.
|
||||
|
||||
## Analyse
|
||||
|
||||
Meneer Groningen heeft als doel een voertuig voor zichzelf waarmee hij van Amsterdam naar Rotterdam kan rijden en minder druk te zetten op het huidig wegverkeer tegenover zijn auto.
|
||||
Meneer Groningen heeft als doel, een voertuig voor zichzelf waarmee hij van Amsterdam naar Rotterdam kan rijden en minder druk te zetten op het huidig wegverkeer tegenover zijn auto. Van hem hebben we 2 definities moeten maken om het pakket van eisen op te stellen
|
||||
|
||||
Het voertuig: De Superlight Personal Carrier die tijdens dit project gemaakt/verbeterd wordt.
|
||||
Bestuurder: De persoon die in het voertuig zit, en het voertuig bestuurd
|
||||
|
||||
De pakket hebben we zo opgesteld omdat we vanaf de grond af aan weer moesten beginnen. We liepen ook tegen het feit aan dat de wensen niet door de opdrachtgever zelf zijn opgesteld maar door ons projectgroepje, hierdoor zijn we een lange tijd kwijtgeraakt aan het analyseren van de requirements voor het project. daarom hebben we het pakket van eisen zo opgesteld.
|
||||
|
||||
## Architectuur
|
||||
|
||||
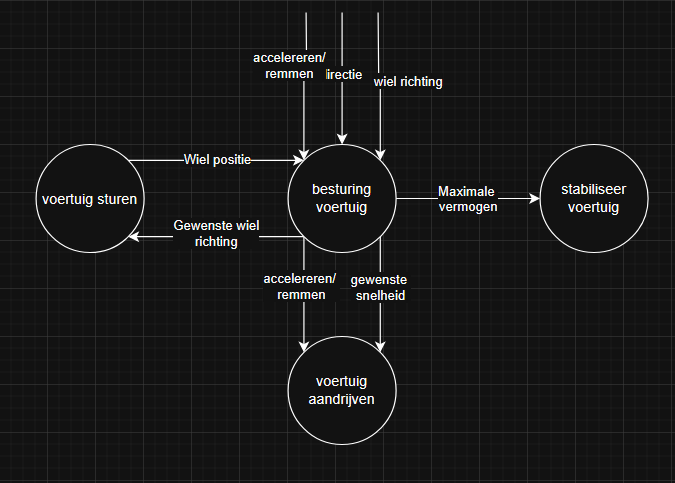
Het systeem heeft verschillende onderdelen die te zien zijn in het DFD1 hieronder, elk onderdeel zorgt ervoor dat het voertuig kan rijden en een stapje verder zetten in het einddoel het vervoeren van een persoon.
|
||||
Het systeem heeft verschillende onderdelen die te zien zijn in het DFD1 hieronder, elk onderdeel zorgt ervoor dat het voertuig kan rijden en een stapje verder kan zetten in het einddoel, het vervoeren van een persoon.
|
||||
|
||||
|
||||
![DFD1]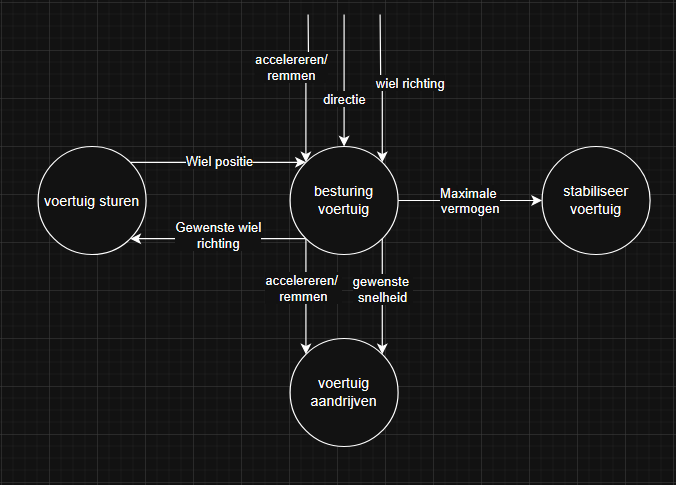
|
||||
|
||||
### VCU
|
||||
|
||||
De Vehicle Control Unit zorgt voor veel onderdelen in het systeem waaronder het sturen van het voertuig en aangeven hoe snel de gebruiker wil, hij geeft een signaal naar de stabilisatie en de motor.
|
||||
De Vehicle Control Unit zorgt voor veel onderdelen in het systeem waaronder het sturen van het voertuig en aangeven hoe snel de gebruiker wil, die geeft een signaal naar de stabilisatie en de motor.
|
||||
|
||||
REQ-C-1[MH]: het voertuig wordt bestuurd doormiddel van een elektronisch input, zoals een joystick, die bedienbaar is door de bestuurder.
|
||||
|
||||
@@ -46,8 +51,6 @@ De aandrijving zorgt ervoor dat het voertuig zichzelf kan voortbewegen op genoeg
|
||||
|
||||
REQ-A-4[MH]: Het voertuig is ontworpen zodat de maximale snelheid 60 kilometer per uur of sneller is.
|
||||
|
||||
In welke omstandigheden.
|
||||
|
||||
60 km/h is de minimale snelheid voor op de snelweg.
|
||||
|
||||
REQ-A-5[SH]: Het voertuig is ontworpen zodat die 150 kilometer per uur of sneller kan rijden in ideale omstandigheden.
|
||||
@@ -61,18 +64,18 @@ REQ-A-7[CH]: Het voertuig is ontworpen zodat die 250 kilometer actieradius of me
|
||||
|
||||
## Vehicle Control unit (VCU)
|
||||
|
||||
De VCU is een belangrijk onderdeel van het systeem, hiermee kunnen we het voertuig in een richting sturen en vooruit bewegen, de belangrijkste keuzes hierin zijn in welke taal we willen gaan programmeren en wat voor soort microcontroller we willen. De reden hiervoor is zodat de volgende team makkelijker kan omgaan met de code en het systeem makkelijker kunnen uitbreiden. het makkelijkst is dan om met de Arduino IDE en taal verder te gaan, omdat het een bekent en veel gedocumenteerd systeem is waar je veel over kan vinden op internet tegenover veel andere IDE's, programmeer talen en microcontrollers. verder moet het ook draadloos verbinding kunnen maken met een console controller zodat de volgende teams eventueel een andere keuze kunnen maken hoe ze willen sturen. Daarom hebben we voor de ESP32 gekozen omdat het alles aantikt met een gezond aantal GPIO pinnen.
|
||||
De VCU is een belangrijk onderdeel van het systeem, hiermee kunnen we het voertuig in een richting sturen en vooruit bewegen. De belangrijkste keuzes hierin zijn in welke taal we willen gaan programmeren en wat voor soort microcontroller we willen. De reden hiervoor is zodat de volgende team makkelijker kan omgaan met de code en het systeem makkelijker kunnen uitbreiden. Het makkelijkst is dan om met de Arduino IDE en framework verder te gaan, omdat het een bekent en veel gedocumenteerd systeem is waar je veel over kan vinden op internet tegenover veel andere IDE's, programmeertalen en microcontrollers. Verder moet het ook draadloos verbinding kunnen maken met een console controller zodat de volgende teams eventueel een andere keuze kunnen maken hoe ze willen sturen. Daarom hebben we voor de ESP32 gekozen omdat het alles aantikt met een gezond aantal GPIO pinnen.
|
||||
|
||||
### Actuator
|
||||
|
||||
De actuator hebben we nodig om de wielen in een richting te kunnen sturen volgens Max Kappert(student automotive engineer) hebben we de volgende parameters gekregen die we nodig hebben om het voertuig te kunnen sturen.
|
||||
De actuator hebben we nodig om de wielen in een richting te kunnen sturen. Volgens Max Kappert(student automotive engineer) hebben we de volgende parameters gekregen die we nodig hebben om het voertuig te kunnen sturen.
|
||||
|
||||
| Parameter | Waarde | Eenheid | Opmerking |
|
||||
|--------------------------------|-------------|------------|----------------------|
|
||||
| Voertuigspanning | 12 - 14 | $V_{DC}$ | typisch voor auto-ECU's |
|
||||
| Voertuigspanning | 12 - 14 | $V_{DC}$ | typisch voor auto-VCU's |
|
||||
| Stuurspanningdemperkle | 0 - 5 | $V_{DC}$ | naloge regeling |
|
||||
| PWM-signaal frequentie | 1000 - 3000 | $Hz$ | Typische range voor aansturing |
|
||||
| PWM duty cycle | 10 - 90 | $\%$ | $0%$: minimale demping, $90%$: maximale demping |
|
||||
| PWM-signaal frequentie | 25000 - 30000 | $Hz$ | Typische range voor aansturing |
|
||||
| PWM duty cycle | 10 - 90 | $\%$ | $10%$: minimale demping, $90%$: maximale demping^[demping voor de ophanging via de interne actuator demper] |
|
||||
| Stroomverbruik klep | 0.5 - 2 | $A$ | Afhankelijk van de interne weerstand |
|
||||
| Wielsnelheid | 0 - 250 | $km/h$ | Meet snelheid per wiel |
|
||||
| Karrosserieversnelling | -3 tot +3 | $g$ | Laterale en verticale versnellingen |
|
||||
@@ -106,7 +109,7 @@ berekeningen voor deze waardes staat in het Detailontwerp Stabilisatie in hoofds
|
||||
|
||||
#### specificaties
|
||||
|
||||
- De drijver moet minimaal $72 V$ aan kunnen, met voorkeur van meer dan $120 V$ [^1]
|
||||
- De drijver moet minimaal $64 V$ aan kunnen, met voorkeur van meer dan $120 V$ [^1]
|
||||
|
||||
De $120V$ komt van de vorige groep die aan dit project hebben gewerkt. Dit is de spanning van de accu die zij hadden gebruikt om dingen mee te berekenen. Er is nog geen besluit wat deze spanning werkelijk gaat worden.
|
||||
|
||||
@@ -132,7 +135,7 @@ De motor is een BLDC motor de volledige naam is een permanent magneet borstelloz
|
||||
|
||||
De motor driver wordt gevoed van een accu, dus DC. Om deze synchrone 3 fases te genereren zijn drie half-brdiges nodig. Een voor elke fase.
|
||||
|
||||
Voor de FET's voor deze Half-bridges is gekozen voor de EPC2307, Dit zijn GaNFET's in tegenstelling to de vaker gebruikte MOSFET's. MOSFET fabrikanten hebben een gewoonte om de maximale stroom te berekenen met perfecte koeling. Dit is dus niet realistisch haalbaar. Om achter te komen wat wel haalbaar is is een thermal analyses nodig, dit is grof weg gedaan voor een redelijk wat MOSFET's, maar geen enkel was geschik om de $50A$ te schakelen. EPC (Efiction Power Converter; de fabrikant van de EPC2307) als een van de weinige fabrikanten wel een realistisch beeld van de maximale stroom.
|
||||
Voor de FET's voor deze Half-bridges is gekozen voor de EPC2307, Dit zijn GaNFET's in tegenstelling to de vaker gebruikte MOSFET's. MOSFET fabrikanten hebben een gewoonte om de maximale stroom te berekenen met perfecte koeling. Dit is dus niet realistisch haalbaar. Om achter te komen wat wel haalbaar is is een thermal analyses nodig, dit is grof weg gedaan voor een redelijk wat MOSFET's, maar geen enkel was geschik om de $50A$ te schakelen. EPC (Efiction Power Converter; de fabrikant van de EPC2307) is een van de weinige fabrikanten wel een realistisch beeld van de maximale stroom.
|
||||
|
||||
Om te bevestigen is een berekening vermaakt hoeveel de FET's aan vermogen verliezen in deze applicatie. Dit is gedaan met de volgende formule.
|
||||
|
||||
@@ -140,13 +143,13 @@ $$
|
||||
P_{loss} = I^2R_{DS(on)} + \frac{UIt}{2} \cdot 2f_s
|
||||
$$
|
||||
|
||||
$I$: stoom
|
||||
$U$: voedingsspanning
|
||||
$t$: schakeltijd
|
||||
$I$: stoom
|
||||
$U$: voedingsspanning
|
||||
$t$: schakeltijd
|
||||
$f_s$: de schakel frequentie
|
||||
|
||||
$U = 120V$, $I = 50A$ (uit specificaties motor driver)
|
||||
$t = 4 ns$ (berekent in simulatie)
|
||||
$t = 4 ns$ (berekent in simulatie)
|
||||
$f_s = 50 kHz$ (frequentie is gekozen omdat die buiten menselijk gehoor licht)
|
||||
|
||||
$P_{loss} = 26.2 W$.
|
||||
@@ -169,7 +172,7 @@ Er is niet gekozen voor een shunt met een versterker, omdat er $200V$ op deze ui
|
||||
|
||||
de motor hoek is nodig voor FOC. Hoe nauwkeuriger deze sensor is hoe efficiënter FOC wordt. De AS5600 is zowel makkelijk te monteren als nauwkeurig zonder dat die elke keer bij het opstarten hoeft gekalibreerd hoeft te worden.
|
||||
|
||||
> Meer informatie warom deze keuze is gemaakt, zie bijlagen Detailontwerp Stabilisatie hooftstuk [Encoder](#encoder)
|
||||
> Meer informatie warom deze keuze is gemaakt, zie bijlagen Detailontwerp Stabilisatie hooftstuk Encoder
|
||||
|
||||
###### Hoek van het voertuig
|
||||
|
||||
|
||||
Reference in New Issue
Block a user