All checks were successful
generate pdf files / build (push) Successful in 2m43s
222 lines
16 KiB
Markdown
222 lines
16 KiB
Markdown
---
|
|
tags: kladjes, elektro, elektro/hr, elektro/hr/pee51
|
|
---
|
|
|
|
[parent](/tPb3Up1fQEuZ86yrJSkYRQ)
|
|
|
|
# Superlight Personal Carier (SPC)
|
|
|
|
## inhoudsopgaven
|
|
|
|
[toc]
|
|
|
|
## Inleiding
|
|
|
|
Het SPC-project is een project vanuit de opleiding Automotive. Het doel is om een lichtgewicht, zelf stabiliserend persoonsvoertuig te ontwikkelen dat als een testplatform kan dienden. Bij dit test platform is het doel om een kleinere milieu vriendelijkere manier van persoonlijk transport dan een 'gewone' auto.
|
|
|
|
## Analyse
|
|
|
|
Niels Groningen - de opdracht gever - wil graag een test platform hebben. Het is lastig harde eisen te stellen aan dit testplatform, aangezien nog niet exact bekend is wat er getest op gaat worden. Het is de bedoeling dat er verschillen soorten testen op gedaan kunnen worden.
|
|
|
|
Voor dit project zijn er wel duidelijke eisen nodig zodat het duidelijk is dat we allebei hetzelfde idee hebben hoe die moet werken. Hierom is er dus doorgevraagd en zijn een aantal richtlijnen uitgekomen.
|
|
|
|
- Het voertuig moet een redelijke actieradius hebben, zoals bijvoorbeeld comfortabel vanaf Amsterdam naar Rotterdam kunnen rijden.
|
|
- Het moet over de snelweg kunnen in theorie, maar hoeft niet aan alle regelgevingen te voldoen.
|
|
- Er moet actieve stabilisatie op komen.
|
|
- Beide wielen moeten gestuurd en aangedreven worden.
|
|
- Het voertuig moet zo licht mogelijk zijn, zonder te veel weg te nemen van gebruikers vriendelijkheid voor de bestuurder.
|
|
- Het voertuig moet uiteindelijk semi-automatisch kunnen rijden.
|
|
|
|
Op basis van deze richtlijnen is er een Pakket van Eisen opgesteld, hierna is er nog wat meer heen en weer gegaan om de eisen wat te fine tunen.
|
|
|
|
Het resulterende Pakket van Eisen is te vinden in de bijlagen.
|
|
|
|
## Architectuur
|
|
|
|
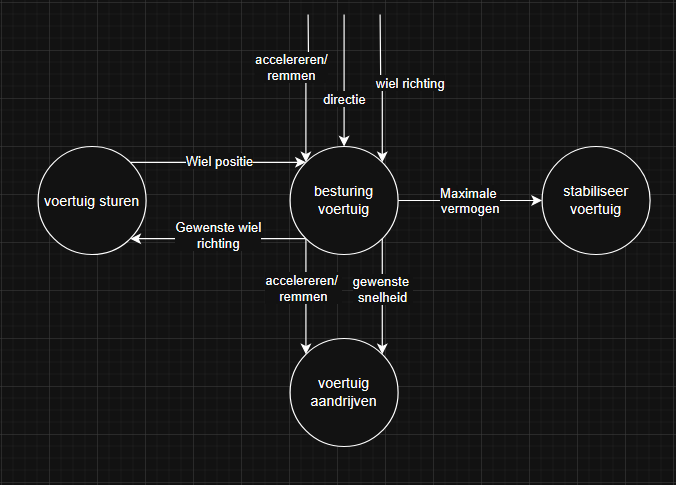
Het systeem heeft verschillende onderdelen die te zien zijn in het DFD1, elk onderdeel zorgt ervoor dat het voertuig kan rijden en een stapje verder kan zetten in het einddoel, het vervoeren van een persoon.
|
|
|
|
|
|
|
|
### VCU
|
|
|
|
De Vehicle Control Unit zorgt voor veel onderdelen in het systeem waaronder het sturen van het voertuig en aangeven hoe snel de gebruiker wil, die geeft een signaal naar de stabilisatie en de motor.
|
|
|
|
REQ-C-1[MH]: het voertuig wordt bestuurd doormiddel van een elektronisch input, zoals een joystick, die bedienbaar is door de bestuurder.
|
|
|
|
REQ-C-2[MH]: er is een noodstop aanwezig.
|
|
|
|
### Stabilisatie
|
|
|
|
De stabilisatie is nodig zodat we het voertuig niet hoeven te verlaten als we stil moeten staan, dit is omdat de bestuurder ingecapsuleerd is in het voertuig. De VCU geeft een data signaal aan de Stabilisatie hoeveel vermogen die mag gebruiken.
|
|
|
|
REQ-S-1[MH]: Het voertuig wordt actief gestabaliseerd
|
|
|
|
REQ-S-2[SH]: Het voertuig kan uit zichzelf weer recht komen te zitten vanaf een roll hoek van 5 graden
|
|
|
|
### aandrijving
|
|
|
|
De aandrijving zorgt ervoor dat het voertuig zichzelf kan voortbewegen op genoeg snelheid zodat er veilig op de weg gereden kan worden. de VCU stuurt een signaal voor accelereren of remmen.
|
|
|
|
REQ-A-4[MH]: Het voertuig is ontworpen zodat de maximale snelheid 60 kilometer per uur of sneller is.
|
|
|
|
60 km/h is de minimale snelheid voor op de snelweg.
|
|
|
|
REQ-A-5[SH]: Het voertuig is ontworpen zodat die 150 kilometer per uur of sneller kan rijden in ideale omstandigheden.
|
|
|
|
REQ-A-6[SH]: Het voertuig is ontworpen zodat die 100 kilometer actieradius of meer kan bereiken in ideale omstandigheden.
|
|
|
|
De opdracht gever wil graag tussen Amsterdam van Rotterdam kunnen rijden.
|
|
|
|
REQ-A-7[CH]: Het voertuig is ontworpen zodat die 250 kilometer actieradius of meer kan bereiken in ideale omstandigheden.
|
|
|
|
|
|
## Vehicle Control unit (VCU)
|
|
|
|
De VCU is een belangrijk onderdeel van het systeem, hiermee kunnen we het voertuig in een richting sturen en vooruit bewegen. De belangrijkste keuzes hierin zijn in welke taal we willen gaan programmeren en wat voor soort microcontroller we willen. De reden hiervoor is zodat de volgende team makkelijker kan omgaan met de code en het systeem makkelijker kunnen uitbreiden. Het makkelijkst is dan om met de Arduino IDE en framework verder te gaan, omdat het een bekent en veel gedocumenteerd systeem is waar je veel over kan vinden op internet tegenover veel andere IDE's, programmeertalen en microcontrollers. Verder moet het ook draadloos verbinding kunnen maken met een console controller zodat de volgende teams eventueel een andere keuze kunnen maken hoe ze willen sturen. Daarom hebben we voor de ESP32 gekozen omdat het alles aantikt met een gezond aantal GPIO pinnen.
|
|
|
|
### Actuator
|
|
|
|
De actuator hebben we nodig om de wielen in een richting te kunnen sturen. Volgens Max Kappert(student automotive engineer) hebben we de volgende parameters gekregen die we nodig hebben om het voertuig te kunnen sturen.
|
|
|
|
| Parameter | Waarde | Eenheid | Opmerking |
|
|
|--------------------------------|-------------|------------|----------------------|
|
|
| Voertuigspanning | 12 - 14 | $V_{DC}$ | typisch voor auto-VCU's |
|
|
| Stuurspanningdemperkle | 0 - 5 | $V_{DC}$ | naloge regeling |
|
|
| PWM-signaal frequentie | 25000 - 30000 | $Hz$ | Typische range voor aansturing |
|
|
| PWM duty cycle | 10 - 90 | $\%$ | $10%$: minimale demping, $90%$: maximale demping^[demping voor de ophanging via de interne actuator demper] |
|
|
| Stroomverbruik klep | 0.5 - 2 | $A$ | Afhankelijk van de interne weerstand |
|
|
| Wielsnelheid | 0 - 250 | $km/h$ | Meet snelheid per wiel |
|
|
| Karrosserieversnelling | -3 tot +3 | $g$ | Laterale en verticale versnellingen |
|
|
| Axiale potentiometer (veerweg) | 0 - 50 | $mm$ | Meet veeruitslag |
|
|
| Temperatuur werkbereik | -40 tot +85 | $^\circ C$ | Automobielstandaard |
|
|
|
|
Voor de Actuator is er een keuze gemaakt voor CDC (Continuous Damping Control) demper van SACHS, Maar vanwege de besteltijden van dit soort componenten kunnen we dit niet gebruiken. Daarom gebruiken we een actuator die er al staat, de A0-01/M van S-LINE. om de actuator te besturen gebruiken we een motordriver, de MDD20A. Dit is omdat we het al hebben en werkt met de huidige actuatoren en voldoende de parameters van de actuatoren behaald, daarom hebben we besloten om niet een nieuwe te kopen of te ontwerpen. Om ervoor te zorgen dat de actuatoren niet te ver gaan gebruiken we de AS5600 magnetic encoder. Dit is omdat de encoder een absoluut positie meegeeft en daarom voor minder problemen zorgt als het voertuig opnieuw opstart.
|
|
|
|
## Stabilisatie
|
|
|
|
Voor de Stabilisatie is er een motor driver ontworpen. De specificaties van deze zijn groten deels gebaseerd op specifieke motor. Samen met Automotive is deze uitgekozen.
|
|
|
|
### De Motor
|
|
|
|
Het is een gevonden op Aliexpress, niet een heel erg betrouwbare verkoper, maar we kunnen niks anders geschikts vinden voor een redelijke prijs. Deze motor kan de kracht net niet aan continu, maar wel voor korte duur. De snelheid is wel ietsje ingeperkt ten opzichte van de berekende $1000 rpm$ dat nodig is, deze kan tot $875 rpm$. Dit is de reden geweest dat we geen motor gaan inkopen, maar een motor driver die geschik is om het volledige vermogen te kunnen halen, en testen met een motor uit de voorraad. Deze zal waarschijnlijk niet voldoende vermogen, maar we kunnen wel testen of het concept werkt voor dat er grote bedragen uitgegeven worden aan een wel geschikte motor.
|
|
|
|
De specificaties van de motor:
|
|
|
|
- $K_T = 0.15 Nm/A$ - motor koppel constante
|
|
- $I_{noload} = 3.52 A$ - Stroom verbruik bij geen koppel
|
|
- $K_v = 69 rpm/V$ - motor snelheidsconstante
|
|
- $V_{th} = 598 mV$ - thrushold voltage
|
|
- $I_{max} = 78.5 A$ - maximaal stroom verbruik voor onze applicatie ($11.2Nm$ met 1:4 gearbox)
|
|
- $U_{max} = 64 V$ - maximaal spanning benodigd voor onze applicatie
|
|
|
|
berekeningen voor deze waardes staat in het Detailontwerp Stabilisatie in hoofdstuk [Motor Keuze](#motor-keuze) (zie bijlagen)
|
|
|
|
> Er is helaas iets fout gegaan bij de berekeningen eerder gedaan om de specificaties vast te stellen. Er is perongeluk met $25 Nm$ gerekent i.p.v. $45 Nm$. Dit betekent dat de motor driver is ontworpen voor $50 A$ i.p.v. $80A$. Dit kan opgelost worden door een motor gearbox combie te vinden die met $50A$ maar een hogere spanning het vermogen haalt. Er is veel ruimte aan spanning, dus dit zal geen groot probleem moeten zijn.
|
|
|
|
### Motor Driver
|
|
|
|
#### specificaties
|
|
|
|
- De drijver moet minimaal $64 V$ aan kunnen, met voorkeur van meer dan $120 V$ [^1]
|
|
|
|
De $120V$ komt van de vorige groep die aan dit project hebben gewerkt. Dit is de spanning van de accu die zij hadden gebruikt om dingen mee te berekenen. Er is nog geen besluit wat deze spanning werkelijk gaat worden.
|
|
|
|
- De drijver moet minimaal $50 A$ continu kunnen leveren (wat eigenlijk $80 A$ had moeten zijn) [^1]
|
|
- Maakt gebruik van Field Orented Controll, om het volledige vermogen te kunnen halen vanaf stilstand.
|
|
- De hoek van het voertuig moet gemeten worden.
|
|
- Er is een regel loop tussen de hoek sensor en de kracht van de motor.
|
|
- Er is een SPI-client connector waarmee verschillende instellingen ingesteld mee kan worden, waaronder het maximaal vermogen.
|
|
|
|
[^1]: Er wordt tot $50 V$ getest, deze waardes wordt het voor ontworpen, maar niet tot de limiet getest.
|
|
|
|
Deze specificaties zijn erg lastig motor driver voor te vinden. Zo lastig dat - zonder een bedrijf een laten ontwerpen - we er geen gevonden hebben. Hierom is gekozen om zelf een motor driver te ontwerpen.
|
|
|
|
De SPI-client is afgesproken met de andere elektrotechnische ingenieurs als algemeen communicatie protocol na dat is besloten om een eigen motor driver te ontwerpen.
|
|
|
|
#### Ontwerp
|
|
|
|
Het ontwerp is gemaakt door Finley, zij heeft op haar stage al een motor driver ontworpen. Hier heeft ze heel veel geleerd over het ontwerpen van een motor driver. Hier komt ook veel van de kennis vandaan. Deze motordriver is niet gebaseerd op die motor driver, deze kan maar $3A$ aan, dus compleet opnieuw beginnen is makkelijker.
|
|
|
|
##### Half-bridges
|
|
|
|
De motor is een BLDC motor de volledige naam is een permanent magneet borstelloze 3 fase synchrone motor. Dit betekent dat er permanente magneten in zitten, geen borstels, aangestuurd met 3 fase en synchrone draait met deze 3 fases.
|
|
|
|
De motor driver wordt gevoed van een accu, dus DC. Om deze synchrone 3 fases te genereren zijn drie half-brdiges nodig. Een voor elke fase.
|
|
|
|
Voor de FET's voor deze Half-bridges is gekozen voor de EPC2307, Dit zijn GaNFET's in tegenstelling to de vaker gebruikte MOSFET's. MOSFET fabrikanten hebben een gewoonte om de maximale stroom te berekenen met perfecte koeling. Dit is dus niet realistisch haalbaar. Om achter te komen wat wel haalbaar is is een thermal analyses nodig, dit is grof weg gedaan voor een redelijk wat MOSFET's, maar geen enkel was geschik om de $50A$ te schakelen. EPC (Efiction Power Converter; de fabrikant van de EPC2307) is een van de weinige fabrikanten wel een realistisch beeld van de maximale stroom.
|
|
|
|
Om te bevestigen is een berekening vermaakt hoeveel de FET's aan vermogen verliezen in deze applicatie. Dit is gedaan met de volgende formule.
|
|
|
|
$$
|
|
P_{loss} = I^2R_{DS(on)} + \frac{UIt}{2} \cdot 2f_s
|
|
$$
|
|
|
|
$I$: stoom
|
|
$U$: voedingsspanning
|
|
$t$: schakeltijd
|
|
$f_s$: de schakel frequentie
|
|
|
|
$U = 120V$, $I = 50A$ (uit specificaties motor driver)
|
|
$t = 4 ns$ (berekent in simulatie)
|
|
$f_s = 50 kHz$ (frequentie is gekozen omdat die buiten menselijk gehoor licht)
|
|
|
|
$P_{loss} = 26.2 W$.
|
|
|
|
Deze formule is erg pessimistisch, deze gaat uit van $100\%$ PWM terwel de uitgang een sinus is dus gemiddeld is het altijd $50\%$ en de schakelverliezen worden ook overschat. Voor meer informatie over deze berekening zie bijlagen Detailontwerp Stabilisatie hoofdstuk [Verliezen in de FET](#verliezen-in-de-fet)
|
|
|
|
> Voor meer informatie over hoe de vermogens filtering is gedaan zie bijlagen Detailontwerp Stabilisatie hoofdstuk [Power Filtering](#power-filtering)
|
|
|
|
##### Sensoren
|
|
|
|
Er zijn drie sensoren nodig, stoom meting, positie van de motor en de hoek van het voertuig.
|
|
|
|
###### stroom meting
|
|
|
|
De stroom meting wordt gedaan met de ACS724xLCTR-50AB. Dit is een stroom meet IC die van $-50A$ tot $+50A$ kan meten. Deze komt tussen de motor en de uitgang van de half-bridges. Het is ook mogelijk om aan de lage FET in de half-bridge te meten met een shunt, maar omdat het nog niet heel duidelijk is hoe het FOC algoritme werkt, lijkt dit een makkelijkere manier om het algoritme te implementeren.
|
|
|
|
Er is niet gekozen voor een shunt met een versterker, omdat er $200V$ op deze uitgang komt te staan. De versterkers die dit aankunnen zijn erg duur en de ACS724xLCTR-50AB wordt dan een goedkopere optie.
|
|
|
|
###### Hoek van de motor
|
|
|
|
de motor hoek is nodig voor FOC. Hoe nauwkeuriger deze sensor is hoe efficiënter FOC wordt. De AS5600 is zowel makkelijk te monteren als nauwkeurig zonder dat die elke keer bij het opstarten hoeft gekalibreerd hoeft te worden.
|
|
|
|
> Meer informatie warom deze keuze is gemaakt, zie bijlagen Detailontwerp Stabilisatie hooftstuk Encoder
|
|
|
|
###### Hoek van het voertuig
|
|
|
|
Een MEMS Gyroscoop kan verandering in de hoek meten, deze is erg snel hierin maar bij afwijking verliest die de nul positie. Hiervoor is een combinatie gekozen met een MEMS-acceleratiemeter. Deze kan met de zwaartekracht meten zolang het voertuig niet te veel beweerd.
|
|
|
|
Om het makkelijk te maken is er gekozen voor de M5Stack IMU Pro Mini. Deze is makkelijk te monteren, omdat die al in een behuizing zit met montage gaten. Deze sensor komt met de BMI270 van Bosch die zowel een MEMS-acceleratiemeter als gyroscoop heeft.
|
|
|
|
> Meer informatie warom deze keuze is gemaakt, zie bijlagen Detailontwerp Stabilisatie hooftstuk [Hoek Sensor](#hoek-sensor)
|
|
|
|
#### Productie en Testen Motor Driver
|
|
|
|
De PCB en stencil zijn geproduceerd door JLCPCB en de componenten zijn geplaatst en in de reflow oven gegaan in het SMD-lab op Accademiplein.
|
|
|
|
Na dat die uit de over kwam zijn er een aantal soleer balletjes weggehaald, twee soldeer bruggen weg gehaald bij een van de gate driver IC's en de microcontroller opnieuw met de hand erop geplast. De microcontroller had te veel tin op de grondpad aan de onderkant, waardoor deze omhoog kwam en de pinnen aan de zijkant boven de PCB zweefde onder contact.
|
|
|
|
Tot hoever er getest is werkt alles, de FET's schakelen en de PWM wordt correct gegenereerd. Helaas heb ik geen foto's van de scope kunnen maken, ik had beide handen vol met de probes en het lukte me niet om met mijn neus de scope te triggeren. Ik ga maandag 23 juni iemand om hulp vragen terwel ik verder ga testen.
|
|
|
|
## Project Verloop
|
|
|
|
Aan het begin was het vooral lastig om duidelijk te maken wat de vereisten van beide opleidingen en tot een format te komen van het Plan van Aanpak en Pakket van eisen die voor beide opleidingen voldoet. Het is ons niet gelukt om tot een enkel Pakket van Eisen te komen, bij Automotive moet het in een Exel bestand. Dit is alleen lastig om te exporteren naar bestand dat geschik is om te kunnen ondertekenen. Daarbij is het ook lastig om er onderbouwing van de eisen bij te zetten, dit is niet nodig voor Automotive.
|
|
|
|
We hebben uiteindelijk ons eigen Pakket van Eisen gemaakt op onze manier en deze vertaalt naar een Exel bestand voor Automotive.
|
|
|
|
Na deze twee documenten zijn er weinig 'conflicten' geweest tussen de eisen van Elektrotechniek en Automotive.
|
|
|
|
Een van de projectleden, Mohamed, is erg weinig komen opdagen. En heeft de drie waarschuwingen gekregen dat volgens de samenwerkingsovereenkomst dat wij hebben opgesteld en getekend (inc. Mohamed), waar na die uit de groep gezet kan worden. i.p.v. dit direct te doen hebben wij als groep samen met Joris Straver een gesprek gehad, wat er toe heeft geleden dat die de groep heeft verlaten. Rond deze tijd had Gryvon ook aangegeven dat die de groep verliet wegen te veel stress met andere vakken.
|
|
|
|
Vanaf school week 4.1 waren we totaal nog maar met 5 personen i.p.v. 7. Dit heeft er tot geleid dat de aandrijving van de wielen hebben laten vallen en de motor driver voor de stabilisatie wat is uitgelopen.
|
|
|
|
## bijlagen
|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|