fix bugs and add refs to images
This commit is contained in:
@@ -28,6 +28,8 @@ do
|
||||
src=$(echo "$line" | sed -e 's/^.*(//' -e 's/).*$//' -e 's/%20;/ /g')
|
||||
echo "include found: markdown/$src"
|
||||
|
||||
download_images "markdown/$src"
|
||||
|
||||
cp "markdown/$src" "$BUILD_DIR/$src"
|
||||
sed -i "$BUILD_DIR/$src" \
|
||||
-e 's|\[toc\]||' \
|
||||
@@ -35,7 +37,8 @@ do
|
||||
-e 's|^# |\\newpage\n# |' \
|
||||
-e 's|^## |\\newpage\n## |' \
|
||||
-e 's|\[\([^]]*\)\](#\([^)]*\))|[\1](#\L\2)|' \
|
||||
-e 's|https://live.kladjes.nl/uploads|../../latex/images|'
|
||||
-e "s|https://live.kladjes.nl/uploads|${BASE_DIR}/latex/images|" \
|
||||
-e "s|\`\`\`mermaid|\`\`\`{.mermaid loc=${BASE_DIR}/latex/images/$(basename "$src")}|"
|
||||
download_images "$BUILD_DIR/$src"
|
||||
|
||||
sed -i "$TEMP_MD_FILE" \
|
||||
@@ -54,11 +57,12 @@ sed -i "$TEMP_MD_FILE" \
|
||||
-e 's|^#||' \
|
||||
-e 's|^# |\\newpage\n# |' \
|
||||
-e 's|\[\([^]]*\)\](#\([^)]*\))|[\1](#\L\2)|' \
|
||||
-e 's|https://live.kladjes.nl/uploads|../../latex/images|' \
|
||||
-e 's|```mermaid|```{.mermaid loc=img}|'
|
||||
-e "s|https://live.kladjes.nl/uploads|${BASE_DIR}/latex/images|" \
|
||||
-e "s|\`\`\`mermaid|\`\`\`{.mermaid loc=${BASE_DIR}/latex/images/$(basename "$MD_FILE")}|"
|
||||
|
||||
# -e 's|```\([^ \t]\)=|```\1 {linenumbers}|'
|
||||
|
||||
mkdir -p ${BASE_DIR}/latex/images/$(basename "$MD_FILE")
|
||||
cd "$BUILD_DIR"
|
||||
pandoc --lua-filter=../../converters/include-files.lua \
|
||||
--to=latex \
|
||||
|
||||
@@ -41,7 +41,7 @@
|
||||
\usepackage{sectsty}
|
||||
\sectionfont{\clearpage}
|
||||
|
||||
\setkeys{Gin}{width=.9\linewidth}
|
||||
\setkeys{Gin}{width=.95\linewidth}
|
||||
|
||||
% add bookmarks with \hypertarget
|
||||
\usepackage{bookmark}
|
||||
|
||||
BIN
externe_bijlagen/Urenstaat en Planning.xlsx
Normal file
BIN
externe_bijlagen/Urenstaat en Planning.xlsx
Normal file
Binary file not shown.
BIN
externe_bijlagen/planned value.pdf
Normal file
BIN
externe_bijlagen/planned value.pdf
Normal file
Binary file not shown.
BIN
externe_bijlagen/risicoanalyse.xlsx
Normal file
BIN
externe_bijlagen/risicoanalyse.xlsx
Normal file
Binary file not shown.
16
makefile
16
makefile
@@ -1,5 +1,5 @@
|
||||
|
||||
all: all_booklets all_docduments
|
||||
all: all_booklets all_docduments package
|
||||
|
||||
all_docduments: prepare pdf/plan_van_aanpak.pdf pdf/detailontwerp_stabilisatie.pdf pdf/detailontwerp_stuursysteem.pdf pdf/unittest_stabilisatie.pdf pdf/softwareontwerp_stabilisatie.pdf pdf/projectdocument.pdf pdf/pakket_van_eisen.pdf pdf/competenties.pdf pdf/foc_onderzoek.pdf
|
||||
all_booklets: prepare pdf/plan_van_aanpak.booklet.pdf pdf/detailontwerp_stabilisatie.booklet.pdf pdf/detailontwerp_stuursysteem.booklet.pdf pdf/unittest_stabilisatie.booklet.pdf pdf/softwareontwerp_stabilisatie.booklet.pdf pdf/projectdocument.booklet.pdf pdf/pakket_van_eisen.booklet.pdf pdf/competenties.booklet.pdf pdf/foc_onderzoek.booklet.pdf
|
||||
@@ -15,7 +15,7 @@ clean_all:
|
||||
|
||||
install_arch:
|
||||
mkdir -p build/install
|
||||
pacman -Sy --noconfirm --needed curl unzip texlive-basic texlive-langeuropean pandoc
|
||||
pacman -Sy --noconfirm --needed curl zip unzip texlive-basic texlive-langeuropean pandoc
|
||||
|
||||
test -e build/install/ubuntu.zip || curl https://assets.ubuntu.com/v1/0cef8205-ubuntu-font-family-0.83.zip -o build/install/ubuntu.zip
|
||||
test -d build/install/ubuntu && rm -r build/install/ubuntu || echo
|
||||
@@ -28,7 +28,7 @@ install_arch:
|
||||
|
||||
test -e build/install/roboto.zip || curl https://dl.dafont.com/dl/?f=roboto -o build/install/roboto.zip
|
||||
test -d build/install/roboto && rm -r build/install/roboto || echo
|
||||
mkdir build/install/roboto
|
||||
mkdir build/install/roboto
|
||||
unzip build/install/roboto.zip -d build/install/roboto
|
||||
mkdir -p /usr/share/fonts/roboto
|
||||
cp build/install/roboto/*.ttf /usr/share/fonts/roboto/
|
||||
@@ -39,7 +39,7 @@ install_ubuntu:
|
||||
mkdir -p build/install
|
||||
apt-get update
|
||||
DEBIAN_FRONTEND=noninteractive apt-get install -y --no-install-recommends \
|
||||
curl unzip texlive texlive-lang-european texlive-lang-greek texlive-xetex pandoc
|
||||
curl zip unzip texlive texlive-lang-european texlive-lang-greek texlive-xetex pandoc
|
||||
|
||||
test -e build/install/ubuntu.zip || curl https://assets.ubuntu.com/v1/0cef8205-ubuntu-font-family-0.83.zip -o build/install/ubuntu.zip
|
||||
test -d build/install/ubuntu && rm -r build/install/ubuntu || echo
|
||||
@@ -52,7 +52,7 @@ install_ubuntu:
|
||||
|
||||
test -e build/install/roboto.zip || curl https://dl.dafont.com/dl/?f=roboto -o build/install/roboto.zip
|
||||
test -d build/install/roboto && rm -r build/install/roboto || echo
|
||||
mkdir build/install/roboto
|
||||
mkdir build/install/roboto
|
||||
unzip build/install/roboto.zip -d build/install/roboto
|
||||
mkdir -p /usr/share/fonts/roboto
|
||||
cp build/install/roboto/*.ttf /usr/share/fonts/roboto/
|
||||
@@ -226,3 +226,9 @@ pdf/projectdocument.booklet.pdf: converters/bookletify.latex pdf/projectdocument
|
||||
sed -e 's|?pdf?|../../pdf/projectdocument.pdf|' converters/bookletify.latex >build/projectdocument.booklet/bookletify.latex
|
||||
pdflatex -interaction=nonstopmode -output-directory="build/projectdocument.booklet" "build/projectdocument.booklet/bookletify.latex"
|
||||
mv build/projectdocument.booklet/bookletify.pdf pdf/projectdocument.booklet.pdf
|
||||
|
||||
package: pdf/projectdocument.pdf externe_bijlagen/*
|
||||
mkdir -p build/export
|
||||
cp externe_bijlagen/* build/export/
|
||||
cp pdf/projectdocument.pdf build/export/
|
||||
cd build/export && zip ../../pdf/spc_documentatie.zip *
|
||||
|
||||
@@ -452,9 +452,9 @@ niet meer gelukt om de simulatie stabiel opnieuw op te bouwen (vermogens van
|
||||
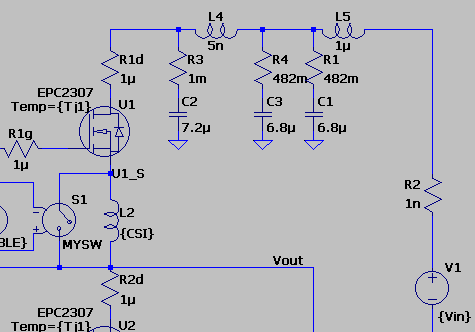
honderden KW bij een kleine aanpassing). Onder staat is de schakeling van de
|
||||
opnieuw opgebouwde schakeling die dus niet werkt.
|
||||
|
||||
|
||||

|
||||
|
||||
C2 zijn de keramische condensatoren vlak bij de FET's (eerste stage), C3 en C1
|
||||
In figuur \ref{detil_stab_sim_fet} is C2 zijn de keramische condensatoren vlak bij de FET's (eerste stage), C3 en C1
|
||||
zijn solid polymer aluminum capacitors voor de tweede stage. L4 is een
|
||||
ingeschatte inductie van de verbinding tussen de condensatoren en L5 is de
|
||||
inductie van de kabels vanaf de accu.
|
||||
@@ -490,7 +490,7 @@ Vijftig ampère is erg veel voor een PCB.
|
||||
(internal), temperature rises up to $100^\circ C$, and widths of up to 400
|
||||
mils (10mm)"
|
||||
|
||||
Deze tool heeft voor $35A$, $150mm$ spoor lengte en $10^\circ C\Delta$ met
|
||||
Deze tool geeft voor $35A$, $150mm$ spoor lengte en $10^\circ C\Delta$ met
|
||||
$70\mu m$ koper een spoor breedte van $20.2mm$. De spoorbreedte is al buiten het
|
||||
berijk van deze tool. Als we toch de stroom verandert naar $50A$ wordt dit
|
||||
$33.1mm$.
|
||||
@@ -507,17 +507,17 @@ capaciteit tussen deze lagen de inductie ietsje compenseert.
|
||||
|
||||
#### Half-bridges
|
||||
|
||||
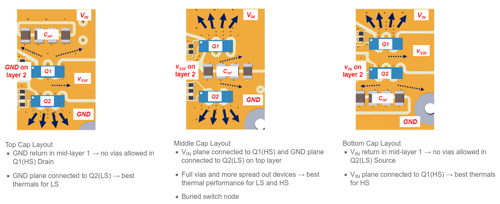
Gelukkig heeft EPC (de fabrikant van de FET's) een aantal aangeraden layouts.
|
||||
Gelukkig heeft EPC (de fabrikant van de FET's) een aantal aangeraden layouts (figuur \ref{detil_stab_fet_ref}).
|
||||
|
||||
|
||||

|
||||
|
||||
Bij dit project worden de high-side (HS) en low-side (LS) FET's ongeveer
|
||||
hetzelfde belast, dus ze hebben dezelfde koeling nodig. Dus er is voor de
|
||||
middelste optie gekozen.
|
||||
|
||||
|
||||

|
||||
|
||||
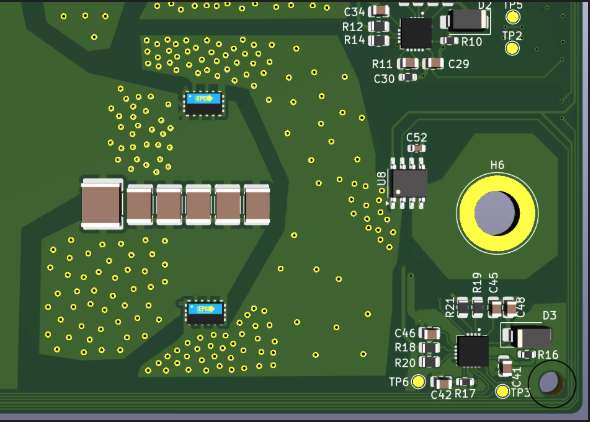
Hierboven is de layout te zien. De rij condensatoren in het midden tussen de
|
||||
In figuur \ref{detil_stab_fet_layout} is de layout te zien. De rij condensatoren in het midden tussen de
|
||||
twee FET's (met veel vias er omheen). Rechts daar van de SOIC-8 is de stroom
|
||||
meting IC en rechts onderin de gate driver.
|
||||
|
||||
|
||||
@@ -90,8 +90,8 @@ De opdracht gever wil graag tussen Amsterdam van Rotterdam kunnen rijden.
|
||||
|
||||
**REQ-A-10[SH]: Het voertuig kan bediend worden door een bestuurder met een lengte van 150 centimeter tot en met 200 centimeter.**
|
||||
|
||||
> bron https://www.cbs.nl/nl-nl/maatwerk/2021/37/lichaamslengte
|
||||
> 8% van 19 jarige vrouwen zijn korter dan 160
|
||||
> bron [www.cbs.nl/nl-nl/maatwerk/2021/37/lichaamslengte](https://www.cbs.nl/nl-nl/maatwerk/2021/37/lichaamslengte)
|
||||
> 8% van 19 jarige vrouwen zijn korter dan 160
|
||||
> 10.2% van 19 jarige mannen zijn korter dan 175
|
||||
|
||||
**REQ-A-11[MH]: De bestuurder van het voertuig zit volledig binnen de afmetingen van het voertuig, met uitzondering van de hoogte.**
|
||||
|
||||
@@ -122,9 +122,9 @@ Er is nog onduidelijkheid over de samenwerking tussen aandrijving en besturing,
|
||||
|
||||
Er is nog geen uitgebreid testprotocol ontwikkeld om de prestaties van de aandrijving systematisch te valideren.
|
||||
|
||||
De huidige status van het project vormt de basis voor verdere ontwikkelingen. De volgende stappen zijn gericht op het verder ontwikkelen van het aandrijf- en stuursysteem en de stabilisatie, zodat er een rijdend 2x2x2 voertuig gerealiseerd wordt.
|
||||
De huidige status (figuur \ref{pva_proto}) van het project vormt de basis voor verdere ontwikkelingen. De volgende stappen zijn gericht op het verder ontwikkelen van het aandrijf- en stuursysteem en de stabilisatie, zodat er een rijdend 2x2x2 voertuig gerealiseerd wordt.
|
||||
|
||||

|
||||

|
||||
|
||||
## Scope & Afbakening
|
||||
|
||||
@@ -190,9 +190,9 @@ In de analyse fase worden de volgende documenten opgesteld:
|
||||
|
||||
### DMADV-model
|
||||
|
||||
In dit hoofdstuk wordt besproken over de aanpak van de opdracht en welke methode gevolgd zal worden tijdens het semester. Dit zal gedaan worden door middel van het DMADV-model. Dat staat voor Define, Measure, Analyze, Design en Verify.
|
||||
In dit hoofdstuk wordt besproken over de aanpak van de opdracht en welke methode gevolgd zal worden tijdens het semester. Dit zal gedaan worden door middel van het DMADV-model (figuur \ref{pva_dmadv}). Dat staat voor Define, Measure, Analyze, Design en Verify.
|
||||
|
||||

|
||||

|
||||
|
||||
#### Define
|
||||
|
||||
@@ -310,8 +310,64 @@ flowchart TD
|
||||
|
||||
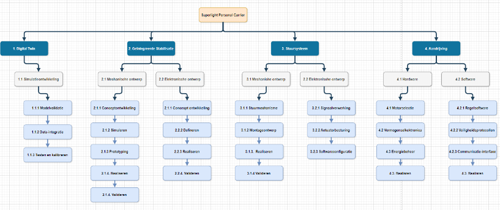
### WBS (Work Breakdown Structure)
|
||||
|
||||
|
||||
```mermaid
|
||||
flowchart TD
|
||||
spc(Superlight Personal Carrier)
|
||||
1(1\. Digital Twin)
|
||||
1.1(1.1 Simulatieontwikkeling)
|
||||
1.1.1(1.1.1 Modelvalidatie)
|
||||
1.1.2(1.1.2 Data-integratie)
|
||||
1.1.3(1.1.3 Testen en kalibreren)
|
||||
2(2\. Geintegreerde Sabilisatie)
|
||||
2.1(2.1 Mechanische ontwerp)
|
||||
2.1.1(2.1.1 Conceptontwikkeling)
|
||||
2.1.2(2.1.2 Simuleren)
|
||||
2.1.3(2.1.3 Prototyping)
|
||||
2.1.4(2.1.4 Realiseren)
|
||||
2.1.5(2.1.5 Valideren)
|
||||
2.2(2.2 Elektnoische ontwerp)
|
||||
2.2.1(2.2.1 Concept ontwikkeling)
|
||||
2.2.2(2.2.2 Defineren)
|
||||
2.2.3(2.2.3 Realiseren)
|
||||
2.2.4(2.2.4 Valideren)
|
||||
3(3\. Stuursysteem)
|
||||
3.1(3.1 Mechanische ontwerp)
|
||||
3.1.1(3.1.1 Stuurmechanisme)
|
||||
3.1.2(3.1.2 Montageontwerp)
|
||||
3.1.3(3.1.3 Realiseren)
|
||||
3.1.4(3.1.4 Valideren)
|
||||
3.2(3.2 Elektnoische ontwerp)
|
||||
3.2.1(3.2.1 Signaalverwerking)
|
||||
3.2.2(3.2.2 actuatorbesturing)
|
||||
3.2.3(3.2.3 Softwareconfiguratie)
|
||||
4(4\. Aandrijving)
|
||||
4.1(4.1 Hardware)
|
||||
4.1.1(4.1.1 Motorselectie)
|
||||
4.1.2(4.1.2 Vermogenselektronica)
|
||||
4.1.3(4.1.3 Energiebeheer)
|
||||
4.1.4(4.1.4 Realiseren)
|
||||
4.2(4.2 software)
|
||||
4.2.1(4.2.1 Regelsoftwere)
|
||||
4.2.2(4.2.2 Veiligheidsprotocollen)
|
||||
4.2.3(4.2.3 Communicatie-interfacd)
|
||||
4.2.4(4.2.4 Realiseren)
|
||||
|
||||
spc --> 1 & 2 & 3 & 4
|
||||
|
||||
1 --> 1.1 --> 1.1.1 --> 1.1.2 --> 1.1.3
|
||||
|
||||
2 --> 2.1 & 2.2
|
||||
2.1 --> 2.1.1 --> 2.1.2 --> 2.1.3 --> 2.1.4 --> 2.1.5
|
||||
2.2 --> 2.2.1 --> 2.2.2 --> 2.2.3 --> 2.2.4
|
||||
|
||||
3 --> 3.1 & 3.2
|
||||
3.1 --> 3.1.1 --> 3.1.2 --> 3.1.3 --> 3.1.4
|
||||
3.2 --> 3.2.1 --> 3.2.2 --> 3.2.3
|
||||
|
||||
4 --> 4.1 & 4.2
|
||||
4.1 --> 4.1.1 --> 4.1.2 --> 4.1.3 --> 4.1.4
|
||||
4.2 --> 4.2.1 --> 4.2.2 --> 4.2.3 --> 4.2.4
|
||||
```
|
||||
|
||||
## Risico- en stakeholder analyse
|
||||
|
||||
@@ -385,8 +441,7 @@ Om het SPC-project succesvol af te ronden, is een goede planning, communicatie e
|
||||
|
||||
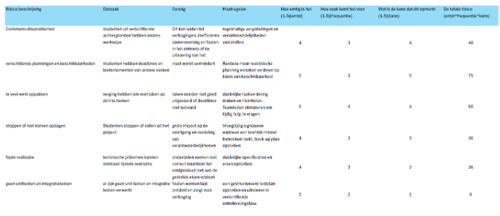
### Risico matrix
|
||||
|
||||
|
||||
|
||||
Er is een risico matirx gemaakt in Exel, dit bestand is samengevoed met dit documnet.
|
||||
|
||||
### Stakeholder analyse
|
||||
|
||||
@@ -428,17 +483,17 @@ C – Consulted (Geraadpleegd): dit is de persoon aan wie vooraf advies gevraagd
|
||||
|
||||
I – Informed (Geïnformeerd): deze persoon wordt tussentijds geïnformeerd over de beslissingen, over de voortgang, bereikte resultaten enz.
|
||||
|
||||
| | Tijn | Max | Thomas | Gryvon | Chris | Finley | Mohammed | Van Groningen |
|
||||
| --- | --- | --- | --- | --- | --- | --- | --- | --- |
|
||||
| Projectplanning | R | I | I | I | I | I | I | |
|
||||
| PVE | I | I | I | I | R | A/R | I | C |
|
||||
| Sponsering | A | R | I | I | I | I | I | I |
|
||||
| Stuursysteem | I | A/R | I | I | R | I | I | C/I |
|
||||
| Aandrijving | I | I | I | A/R | I | I | R | C/I |
|
||||
| Stabilisatie | A/R | I | I | I | I | R | I | C/I |
|
||||
| Sim model | C/I | C/I | A/R | I | I | I | I | C |
|
||||
| Concept ontwikkelen | R | R | R | R | R | R | R | C/I |
|
||||
| Begroting & kosten | A | C | C | C | R | C | C | C/I |
|
||||
| | Tijn | Max | Thomas | Gryvon | Chris | Finley | Mohammed | Van Groningen |
|
||||
| ------------------- | ---- | --- | ------ | ------ | ----- | ------ | -------- | ------------- |
|
||||
| Projectplanning | R | I | I | I | I | I | I | |
|
||||
| PVE | I | I | I | I | R | A/R | I | C |
|
||||
| Sponsering | A | R | I | I | I | I | I | I |
|
||||
| Stuursysteem | I | A/R | I | I | R | I | I | C/I |
|
||||
| Aandrijving | I | I | I | A/R | I | I | R | C/I |
|
||||
| Stabilisatie | A/R | I | I | I | I | R | I | C/I |
|
||||
| Sim model | C/I | C/I | A/R | I | I | I | I | C |
|
||||
| Concept ontwikkelen | R | R | R | R | R | R | R | C/I |
|
||||
| Begroting & kosten | A | C | C | C | R | C | C | C/I |
|
||||
|
||||
## Planning
|
||||
|
||||
@@ -473,17 +528,15 @@ In de analyse fase worden de volgende documenten opgesteld:
|
||||
|
||||
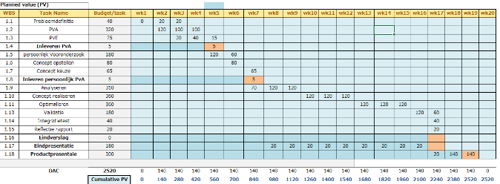
### Value planning
|
||||
|
||||
|
||||
|
||||
Zie `planned value.pdf`.
|
||||
|
||||
### Dynamische planning
|
||||
|
||||
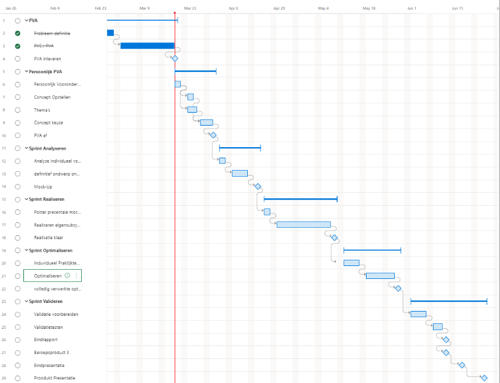
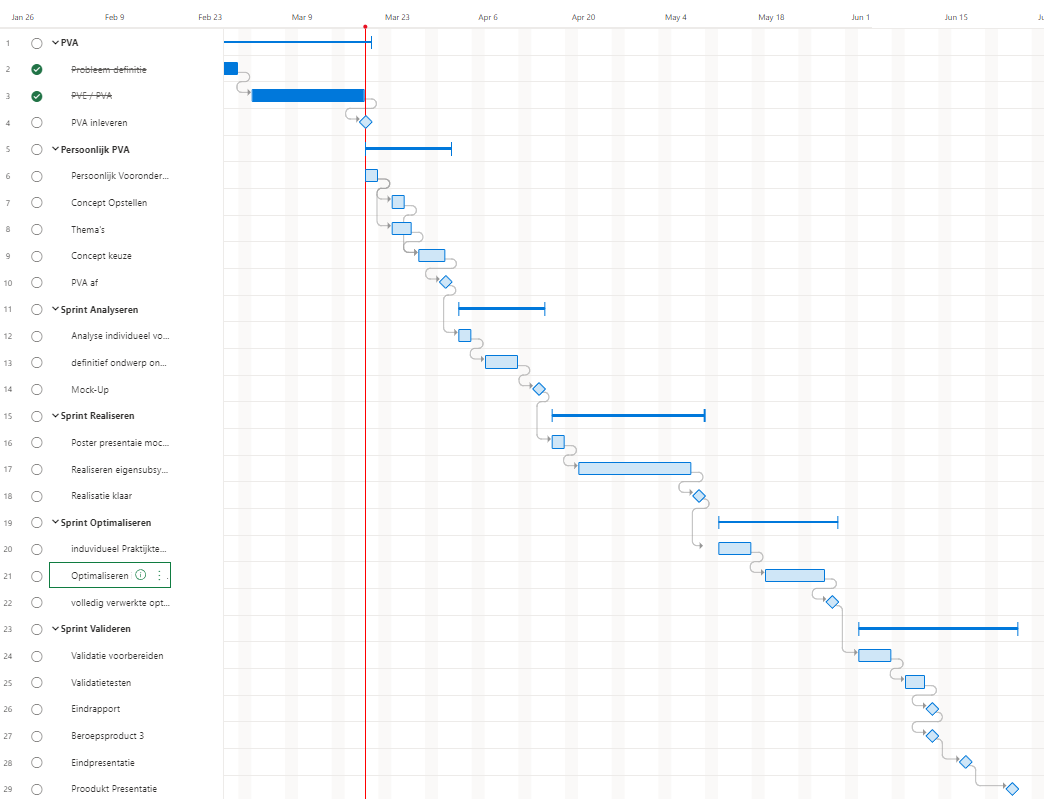
Deze planning geeft een overzicht van de verschillende fasen en bijbehorende taken binnen dit project. Door middel van een Gantt-diagram worden de doorlooptijden, afhankelijkheden en mijlpalen visueel weergegeven. De planning is opgedeeld in meerdere sprints, waaronder **Sprint Analyseren**, **Sprint Realiseren**, **Sprint Optimaliseren**, en **Sprint Valideren**, waarmee het project stapsgewijs wordt ontwikkeld en geoptimaliseerd.
|
||||
Deze planning geeft een overzicht van de verschillende fasen en bijbehorende taken binnen dit project. Door middel van een Gantt-diagram (figuur \ref{gantt}) worden de doorlooptijden, afhankelijkheden en mijlpalen visueel weergegeven. De planning is opgedeeld in meerdere sprints, waaronder **Sprint Analyseren**, **Sprint Realiseren**, **Sprint Optimaliseren**, en **Sprint Valideren**, waarmee het project stapsgewijs wordt ontwikkeld en geoptimaliseerd.
|
||||
|
||||
De blauwe balken geven de duur van elke taak aan, terwijl de diamantvormige symbolen belangrijke mijlpalen markeren. De rode verticale lijn geeft de huidige voortgang weer. Dit overzicht helpt bij het bewaken van deadlines, het coördineren van werkzaamheden en het tijdig bijsturen van het project waar nodig
|
||||
|
||||
|
||||
|
||||
|
||||
|
||||
## Begroting
|
||||
|
||||
|
||||
@@ -79,9 +79,9 @@ in het hoofdstuk Architectuur wordden de balangrijkste eisen
|
||||
|
||||
## Architectuur
|
||||
|
||||
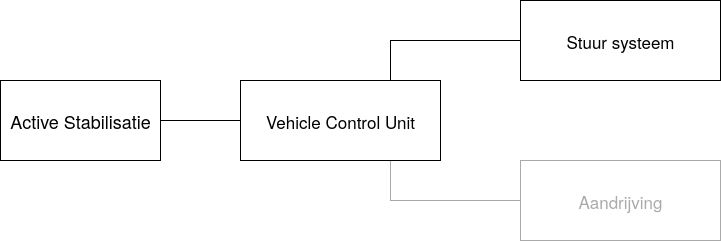
Het diagram [Units](ref:units) is een overzicht van de units van dit project.
|
||||
Het diagram in figuur \ref{doc_units} is een overzicht van de units van dit project.
|
||||
|
||||
|
||||

|
||||
|
||||
### unit: Vehicle Control Unit (VCU)
|
||||
|
||||
@@ -156,13 +156,13 @@ parameters gekregen die we nodig hebben om het voertuig te kunnen sturen.
|
||||
|
||||
| Parameter | Waarde | Eenheid | Opmerking |
|
||||
| ---------------------- | ------------- | -------- | ----------------------------------------------------------------------------------------------------------- |
|
||||
| Voertuigspanning | 12 - 14 | $V_{DC}$ | typisch voor auto-VCU's |
|
||||
| Stuurspanningdemperkle | 0 - 5 | $V_{DC}$ | naloge regeling |
|
||||
| Voertuig-spanning | 12 - 14 | $V_{DC}$ | typisch voor auto-VCU's |
|
||||
| Stuurspanning-demperkle | 0 - 5 | $V_{DC}$ | naloge regeling |
|
||||
| PWM-signaal frequentie | 25000 - 30000 | $Hz$ | Typische range voor aansturing |
|
||||
| PWM duty cycle | 10 - 90 | $\%$ | $10\%$: minimale demping, $90\%$: maximale demping^[demping voor de ophanging via de interne actuator demper] |
|
||||
| Stroomverbruik klep | 0.5 - 2 | $A$ | Afhankelijk van de interne weerstand |
|
||||
| Wielsnelheid | 0 - 250 | $km/h$ | Meet snelheid per wiel |
|
||||
| Karrosserieversnelling | -3 tot +3 | $g$ | Laterale en verticale versnellingen |
|
||||
| Karrosserie-versnelling | -3 tot +3 | $g$ | Laterale en verticale versnellingen |
|
||||
| Axiale potentiometer (veerweg) | 0 - 50 | $mm$ | Meet veeruitslag |
|
||||
| Temperatuur werkbereik | -40 tot +85 | $^\circ C$ | Automobielstandaard |
|
||||
|
||||
@@ -180,11 +180,11 @@ het voertuig opnieuw opstart.
|
||||
## Stabilisatie
|
||||
|
||||
De groepen voor ons hebben al een klein schaal model voor een reactiewiel
|
||||
gemakakt en een, wat voledige schaal lijkt te zijn, vliegwiel opstelling gemaakt.
|
||||
gemaakt en een, wat volledige schaal lijkt te zijn, vliegwiel opstelling gemaakt.
|
||||
|
||||
Documentatie over de vliegwiel opstelling hebben wij niet terug gevoenden. Maar
|
||||
Documentatie over de vliegwiel opstelling hebben wij niet terug gevonden. Maar
|
||||
wel van het kleine schaal model, de reactiewiel opstelling is pas gevonden aan het einde van
|
||||
het project - Voor onze opvolgers, in het proto lab tussen de planten en de 3d
|
||||
het project - Voor onze opvolgers, in het Proto Lab tussen de planten en de 3D
|
||||
printers is de linker kast - De reactiewiel opstelling is later gemaakt dat de vliegwiel opstelling, er was dus blijkbaar een reden dat de vliegwiel opstelling niet geschikt was. De automotive engineers onder ons hebben berekent wat de beste keuze is.
|
||||
|
||||
Dit heeft even geduurd, ondertussen zijn de elektronische engineers onderzoek gedaan naar wat voor soort motor drivers er zijn.
|
||||
|
||||
Reference in New Issue
Block a user