test 1.3 and start on 1.4
This commit is contained in:
BIN
assets/VersdOS.zip
Normal file
BIN
assets/VersdOS.zip
Normal file
Binary file not shown.
BIN
assets/assignment_4.2.zip
Normal file
BIN
assets/assignment_4.2.zip
Normal file
Binary file not shown.
@@ -87,8 +87,8 @@ $endif$
|
|||||||
\begin{tabular}{r l}
|
\begin{tabular}{r l}
|
||||||
Auther: $for(auther)$& $auther.name$ <$auther.email$> \\
|
Auther: $for(auther)$& $auther.name$ <$auther.email$> \\
|
||||||
$endfor$\\
|
$endfor$\\
|
||||||
Class code: & ELERTS10 \\\\
|
Class code: & $class_code$ \\\\
|
||||||
Exported on: &\today
|
Exported on: & \today
|
||||||
|
|
||||||
\end{tabular}
|
\end{tabular}
|
||||||
}
|
}
|
||||||
|
|||||||
8
makefile
8
makefile
@@ -27,7 +27,7 @@ install_arch:
|
|||||||
|
|
||||||
test -e build/install/roboto.zip || curl https://dl.dafont.com/dl/?f=roboto -o build/install/roboto.zip
|
test -e build/install/roboto.zip || curl https://dl.dafont.com/dl/?f=roboto -o build/install/roboto.zip
|
||||||
test -d build/install/roboto && rm -r build/install/roboto || echo
|
test -d build/install/roboto && rm -r build/install/roboto || echo
|
||||||
mkdir build/install/roboto
|
mkdir build/install/roboto
|
||||||
unzip build/install/roboto.zip -d build/install/roboto
|
unzip build/install/roboto.zip -d build/install/roboto
|
||||||
mkdir -p /usr/share/fonts/roboto
|
mkdir -p /usr/share/fonts/roboto
|
||||||
cp build/install/roboto/*.ttf /usr/share/fonts/roboto/
|
cp build/install/roboto/*.ttf /usr/share/fonts/roboto/
|
||||||
@@ -51,7 +51,7 @@ install_ubuntu:
|
|||||||
|
|
||||||
test -e build/install/roboto.zip || curl https://dl.dafont.com/dl/?f=roboto -o build/install/roboto.zip
|
test -e build/install/roboto.zip || curl https://dl.dafont.com/dl/?f=roboto -o build/install/roboto.zip
|
||||||
test -d build/install/roboto && rm -r build/install/roboto || echo
|
test -d build/install/roboto && rm -r build/install/roboto || echo
|
||||||
mkdir build/install/roboto
|
mkdir build/install/roboto
|
||||||
unzip build/install/roboto.zip -d build/install/roboto
|
unzip build/install/roboto.zip -d build/install/roboto
|
||||||
mkdir -p /usr/share/fonts/roboto
|
mkdir -p /usr/share/fonts/roboto
|
||||||
cp build/install/roboto/*.ttf /usr/share/fonts/roboto/
|
cp build/install/roboto/*.ttf /usr/share/fonts/roboto/
|
||||||
@@ -66,9 +66,9 @@ latex/assambly_report.latex: converters/mdToLatex.sh converters/template.latex r
|
|||||||
mkdir -p build/assambly_report
|
mkdir -p build/assambly_report
|
||||||
bash converters/mdToLatex.sh report-1/assambly_report.md latex/assambly_report.latex
|
bash converters/mdToLatex.sh report-1/assambly_report.md latex/assambly_report.latex
|
||||||
|
|
||||||
latex/c_report.latex: converters/mdToLatex.sh converters/template.latex report-1/*.md
|
latex/c_report.latex: converters/mdToLatex.sh converters/template.latex report-2/*.md
|
||||||
mkdir -p build/c_report
|
mkdir -p build/c_report
|
||||||
bash converters/mdToLatex.sh report-1/c_report.md latex/c_report.latex
|
bash converters/mdToLatex.sh report-2/c_report.md latex/c_report.latex
|
||||||
|
|
||||||
# =======================================
|
# =======================================
|
||||||
# === pdf generation ====================
|
# === pdf generation ====================
|
||||||
|
|||||||
@@ -1,5 +1,6 @@
|
|||||||
---
|
---
|
||||||
sub_title: "Real Time Systems 10"
|
sub_title: "Real Time Systems 10"
|
||||||
|
class_code: "ELERTS10"
|
||||||
auther:
|
auther:
|
||||||
- name: "Finley van Reenen (0964590)"
|
- name: "Finley van Reenen (0964590)"
|
||||||
email: "mail@lailatheelf.nl"
|
email: "mail@lailatheelf.nl"
|
||||||
|
|||||||
@@ -27,7 +27,7 @@ Bit 12 and 14 sould start different as bit 13 and 15. Then invert all four bits
|
|||||||
|
|
||||||
I found the defines in the sourcefile where the _modder_ defines are defined.
|
I found the defines in the sourcefile where the _modder_ defines are defined.
|
||||||
|
|
||||||
```c-like=
|
```c {.numberLines}
|
||||||
#include <stdint.h>
|
#include <stdint.h>
|
||||||
#include <stm32f4xx.h>
|
#include <stm32f4xx.h>
|
||||||
|
|
||||||
@@ -78,7 +78,7 @@ skiped
|
|||||||
|
|
||||||
I added line 6 throw 15, the rest is uncheached.
|
I added line 6 throw 15, the rest is uncheached.
|
||||||
|
|
||||||
```c-like=
|
```c {.numberLines}
|
||||||
#include <stdint.h>
|
#include <stdint.h>
|
||||||
#include <stm32f4xx.h>
|
#include <stm32f4xx.h>
|
||||||
|
|
||||||
@@ -125,7 +125,7 @@ I mesured the toggle time to be around 1.5 seconsds. This is what is expected.
|
|||||||
|
|
||||||
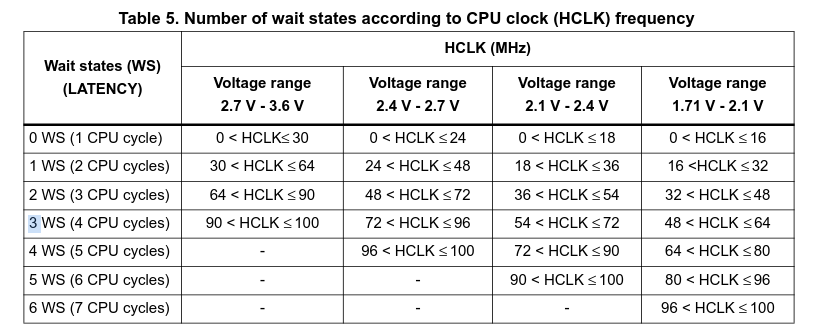
First the power modules needs to be configured to allow for the hige clockspeed.
|
First the power modules needs to be configured to allow for the hige clockspeed.
|
||||||
|
|
||||||
```c-like
|
```c
|
||||||
// enable power control
|
// enable power control
|
||||||
RCC->APB1ENR |= RCC_APB1ENR_PWREN;
|
RCC->APB1ENR |= RCC_APB1ENR_PWREN;
|
||||||
// set voltage to support 100 MHz
|
// set voltage to support 100 MHz
|
||||||
@@ -136,7 +136,7 @@ Now the flash latancy is set. The powersupply on the board is $3V$. This means t
|
|||||||
|
|
||||||
|

|
||||||
|
|
||||||
```c-like
|
```c
|
||||||
// set flash latency to support 100 MHz
|
// set flash latency to support 100 MHz
|
||||||
FLASH->ACR |= FLASH_ACR_LATENCY_3WS;
|
FLASH->ACR |= FLASH_ACR_LATENCY_3WS;
|
||||||
// Wait until the wait states are used
|
// Wait until the wait states are used
|
||||||
|
|||||||
@@ -1,5 +1,6 @@
|
|||||||
---
|
---
|
||||||
sub_title: "Real Time Systems 10"
|
sub_title: "Real Time Systems 10"
|
||||||
|
class_code: "ELERTS10"
|
||||||
auther:
|
auther:
|
||||||
- name: "Finley van Reenen (0964590)"
|
- name: "Finley van Reenen (0964590)"
|
||||||
email: "mail@lailatheelf.nl"
|
email: "mail@lailatheelf.nl"
|
||||||
@@ -11,3 +12,5 @@ auther:
|
|||||||
[toc]
|
[toc]
|
||||||
|
|
||||||

|

|
||||||
|
|
||||||
|

|
||||||
|
|||||||
@@ -10,9 +10,18 @@ auther:
|
|||||||
|
|
||||||
## assignment 3.1
|
## assignment 3.1
|
||||||
|
|
||||||
base project [opdr_2_1](/assets/opdr_2_1.zip).
|
> Base your code of `opdr_2_1.zip`.
|
||||||
|
> Configure the `SysTick` timer to set the `COUNTFLAG` in the `STK_CTRL` register every $0.5s$. Replace the for-loop with the following C code: `while (( STK_CTRL & (1 << 16)) == 0);` You have to properly define the symbol STK_CTRL yourself to make this work. Build and debug the project. If all is well, the user LEDs will blink with a frequency of $1 Hz$.
|
||||||
|
|
||||||
```c
|
With bit 2 of `STK_CTRL` the clock source can be set. `1` for `AHB` or `0` for `AHB/8`. `AHB` is by default `HSI` witch is $16MHz$. I chose to use `AHB/8`.
|
||||||
|
|
||||||
|
$$
|
||||||
|
T = \frac{AHB/8}{f_{out}} = \frac{16\cdot 10^6/8}{2} = 10^6
|
||||||
|
$$
|
||||||
|
|
||||||
|
My resulting code:
|
||||||
|
|
||||||
|
```c {.numberLines}
|
||||||
#include <stdint.h>
|
#include <stdint.h>
|
||||||
|
|
||||||
#define RCC_AHB1ENR_BIT_GPIODEN *(volatile uint32_t*)(0x42000000 + 0x00023830 * 32 + 3 * 4)
|
#define RCC_AHB1ENR_BIT_GPIODEN *(volatile uint32_t*)(0x42000000 + 0x00023830 * 32 + 3 * 4)
|
||||||
@@ -32,9 +41,10 @@ int main(void)
|
|||||||
// Set green and red LEDs
|
// Set green and red LEDs
|
||||||
GPIOD_ODR = 0x5000;
|
GPIOD_ODR = 0x5000;
|
||||||
|
|
||||||
// SysTick enable with clk source to AHB/8
|
// SysTick enable with clk source to AHB/8
|
||||||
STK_CTRL = (1<<2) | 1;
|
// (AHB is by default HSI; 16 MHz/8)
|
||||||
STK_LOAD = 500000; // 0.5 sec / (8 MHz / 8)
|
STK_CTRL = 1;
|
||||||
|
STK_LOAD = 1000000; // 16 MHz / 8 / 2 Hz
|
||||||
// Do forever:
|
// Do forever:
|
||||||
while (1)
|
while (1)
|
||||||
{
|
{
|
||||||
@@ -46,9 +56,15 @@ int main(void)
|
|||||||
}
|
}
|
||||||
```
|
```
|
||||||
|
|
||||||
|
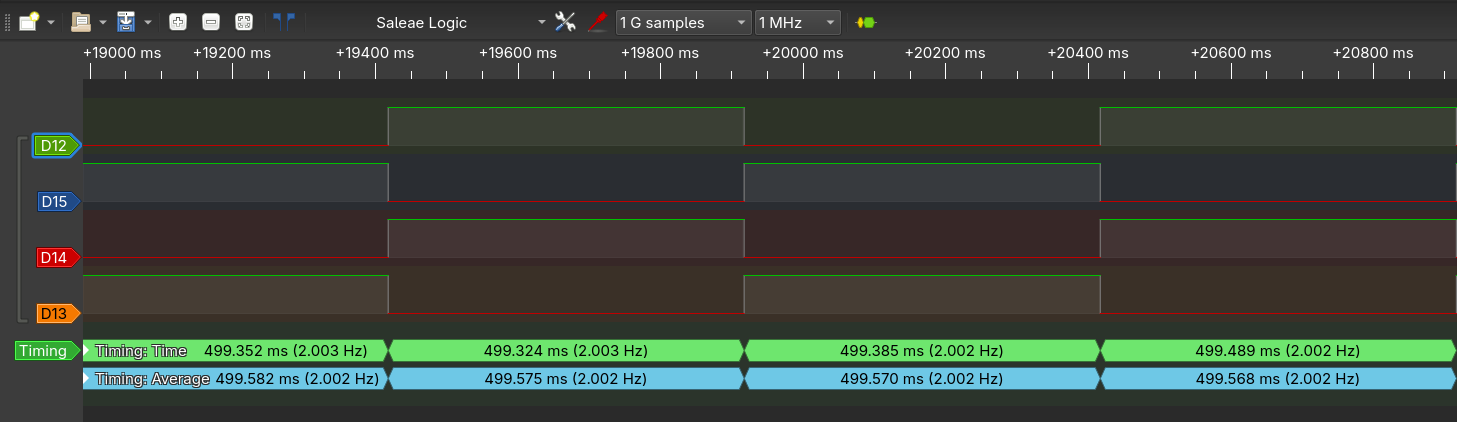
I measured the resulting frequency with an logic analyser ([[#logic-analiser-view-of-LEDs-for-assignment-31]]; channels are collerd to the led color). It measuerd a period time of $499.568ms$, I call this error could be my cheap logic analyser or en error in the internal oscilator.
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
## assignment 3.2
|
## assignment 3.2
|
||||||
|
|
||||||
```c
|
> Configure the SysTick timer to set the `COUNTFLAG` in the `STK_CTRL` register every $0.5s$ using the CMSIS API. Replace the for-loop with the following C code: `while ((SysTick->CTRL & (1 << 16)) == 0);` The symbol SysTick is defined in the CMSIS API. Build and debug the project. If all is well, the user LEDs will blink with a frequency of $1 Hz$.
|
||||||
|
|
||||||
|
```c {.numberLines}
|
||||||
#include <stdint.h>
|
#include <stdint.h>
|
||||||
#include <stm32f4xx.h>
|
#include <stm32f4xx.h>
|
||||||
|
|
||||||
@@ -66,7 +82,7 @@ int main(void)
|
|||||||
|
|
||||||
// SysTick enable with clk source to AHB/8
|
// SysTick enable with clk source to AHB/8
|
||||||
SysTick->CTRL = SysTick_CTRL_ENABLE_Msk;
|
SysTick->CTRL = SysTick_CTRL_ENABLE_Msk;
|
||||||
SysTick->LOAD = 500000; // 0.5 sec / (8 MHz / 8)
|
SysTick->LOAD = 1000000; // 16 MHz / 8 / 2 Hz
|
||||||
|
|
||||||
// Do forever:
|
// Do forever:
|
||||||
while (1)
|
while (1)
|
||||||
@@ -82,9 +98,13 @@ int main(void)
|
|||||||
}
|
}
|
||||||
```
|
```
|
||||||
|
|
||||||
|
This time I measured $499.586ms$ with the logic analyser.
|
||||||
|
|
||||||
## assignment 3.3
|
## assignment 3.3
|
||||||
|
|
||||||
```c
|
> B) Configure the SysTick timer to generate an interrupt (also called an exception) every `0.5s`.
|
||||||
|
|
||||||
|
```c {.numberLines}
|
||||||
#include <stdint.h>
|
#include <stdint.h>
|
||||||
#include <stdbool.h>
|
#include <stdbool.h>
|
||||||
|
|
||||||
@@ -114,7 +134,7 @@ int main(void)
|
|||||||
|
|
||||||
// SysTick enable with interupt and clk source to AHB/8
|
// SysTick enable with interupt and clk source to AHB/8
|
||||||
STK_CTRL = (1<<1) | 1;
|
STK_CTRL = (1<<1) | 1;
|
||||||
STK_LOAD = 500000; // 0.5 sec / (8 MHz / 8)
|
STK_LOAD = 1000000; // 0.5 sec / (16 MHz / 8)
|
||||||
// Do forever:
|
// Do forever:
|
||||||
while (1)
|
while (1)
|
||||||
{
|
{
|
||||||
@@ -134,11 +154,11 @@ int main(void)
|
|||||||
|
|
||||||
becouse the compiler doesn't know when `flag` changes. Without `volatile` optimisations can think it does not change at all.
|
becouse the compiler doesn't know when `flag` changes. Without `volatile` optimisations can think it does not change at all.
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
## assignment 3.4
|
## assignment 3.4
|
||||||
|
|
||||||
```c
|
> Configure the SysTick timer to generate an interrupt every `0.5s`. This can be done by using the function `SysTick_Config` from the CMSIS API.
|
||||||
|
|
||||||
|
```c {.numberLines}
|
||||||
#include <stdint.h>
|
#include <stdint.h>
|
||||||
#include <stm32f4xx.h>
|
#include <stm32f4xx.h>
|
||||||
#include <stdbool.h>
|
#include <stdbool.h>
|
||||||
@@ -164,7 +184,7 @@ int main(void)
|
|||||||
|
|
||||||
// SysTick enable with interupt and clk source to AHB/8
|
// SysTick enable with interupt and clk source to AHB/8
|
||||||
SysTick->CTRL = SysTick_CTRL_TICKINT_Msk | SysTick_CTRL_ENABLE_Msk;
|
SysTick->CTRL = SysTick_CTRL_TICKINT_Msk | SysTick_CTRL_ENABLE_Msk;
|
||||||
SysTick->LOAD = 500000; // 0.5 sec / (8 MHz / 8)
|
SysTick->LOAD = 1000000; // 0.5 sec / (16 MHz / 8)
|
||||||
|
|
||||||
// Do forever:
|
// Do forever:
|
||||||
while (1)
|
while (1)
|
||||||
@@ -186,7 +206,9 @@ int main(void)
|
|||||||
|
|
||||||
## assignment 3.5
|
## assignment 3.5
|
||||||
|
|
||||||
```c
|
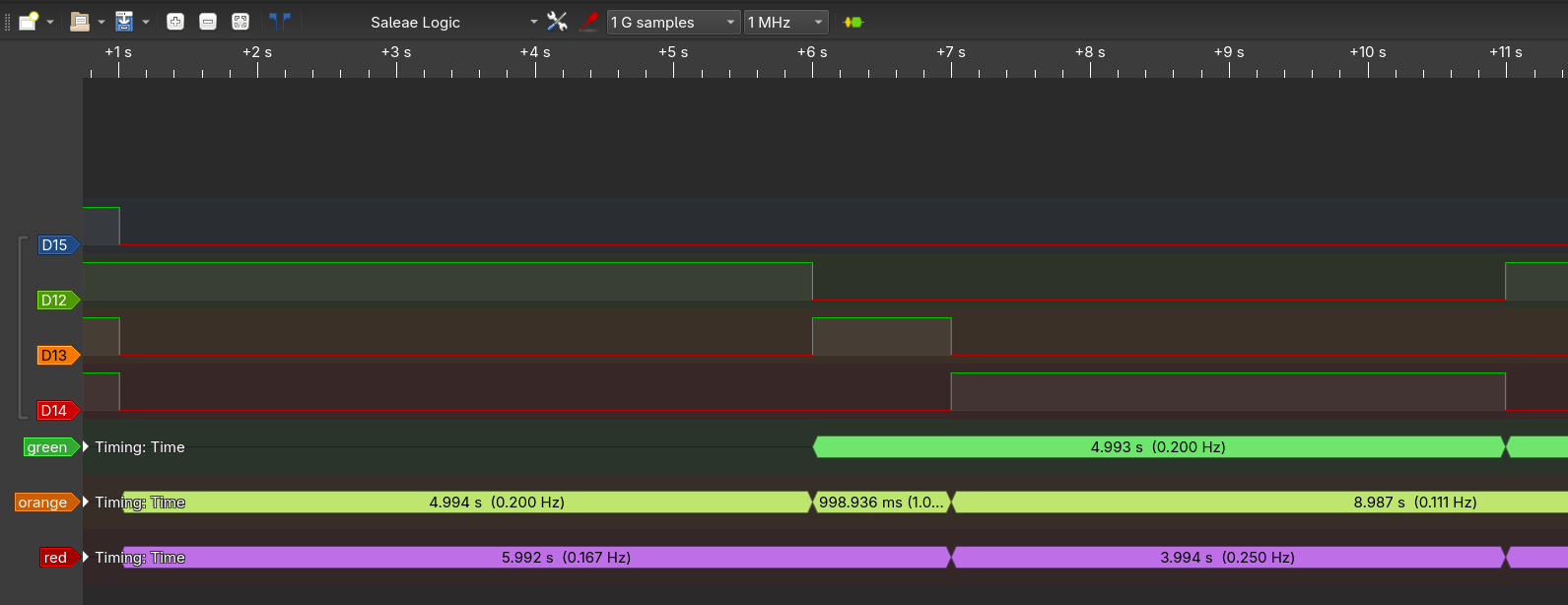
> Now based on project opdr_3_4 create a rotation loop which simulates a simple traffic light: green (5 seconds), orange (1 second), red (4 seconds). The time each light is on must be easily adjustable with a granularity of $0.5s$. The processor must be put to sleep in between interrupts. Make use of an enumeration construct (`enum`) for the colors and a `switch`-`case`-statement for the rotation.
|
||||||
|
|
||||||
|
```c {.numberLines}
|
||||||
#include <stdint.h>
|
#include <stdint.h>
|
||||||
#include <stm32f4xx.h>
|
#include <stm32f4xx.h>
|
||||||
#include <stdbool.h>
|
#include <stdbool.h>
|
||||||
@@ -214,11 +236,11 @@ int main(void)
|
|||||||
| GPIO_MODER_MODER14_0
|
| GPIO_MODER_MODER14_0
|
||||||
| GPIO_MODER_MODER15_0;
|
| GPIO_MODER_MODER15_0;
|
||||||
// Set green and red LEDs
|
// Set green and red LEDs
|
||||||
GPIOD->ODR = GPIO_ODR_OD12 | GPIO_ODR_OD14;
|
GPIOD->ODR = GPIO_ODR_OD12;
|
||||||
|
|
||||||
// SysTick enable with interupt and clk source to AHB/8
|
// SysTick enable with interupt and clk source to AHB/8
|
||||||
SysTick->CTRL = SysTick_CTRL_TICKINT_Msk | SysTick_CTRL_ENABLE_Msk;
|
SysTick->CTRL = SysTick_CTRL_TICKINT_Msk | SysTick_CTRL_ENABLE_Msk;
|
||||||
SysTick->LOAD = 500000; // 0.5 sec / (8 MHz / 8)
|
SysTick->LOAD = 1000000; // 0.5 sec / (8 MHz / 8)
|
||||||
|
|
||||||
// time of each color in half seconds
|
// time of each color in half seconds
|
||||||
const uint32_t time_green = 10; // 5 seconds
|
const uint32_t time_green = 10; // 5 seconds
|
||||||
@@ -268,9 +290,23 @@ int main(void)
|
|||||||
}
|
}
|
||||||
```
|
```
|
||||||
|
|
||||||
|
Again I validated the timesing with the logicanalyser.
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
## assignment 3.6
|
## assignment 3.6
|
||||||
|
|
||||||
```c
|
> - reate a copy of the previous project and rename it to opdr_3_6.
|
||||||
|
> - Using the description of this assignment, define a struct for a “task” and create a global array of 8 empty tasks.
|
||||||
|
> - Create a function `addTask(...)` to help create a task from a function pointer and other parameters, and add it to the task list (the array) at an appropriate index.
|
||||||
|
> - Create 4 functions to toggle each led separately, these are the functions that will correspond to 4 tasks.
|
||||||
|
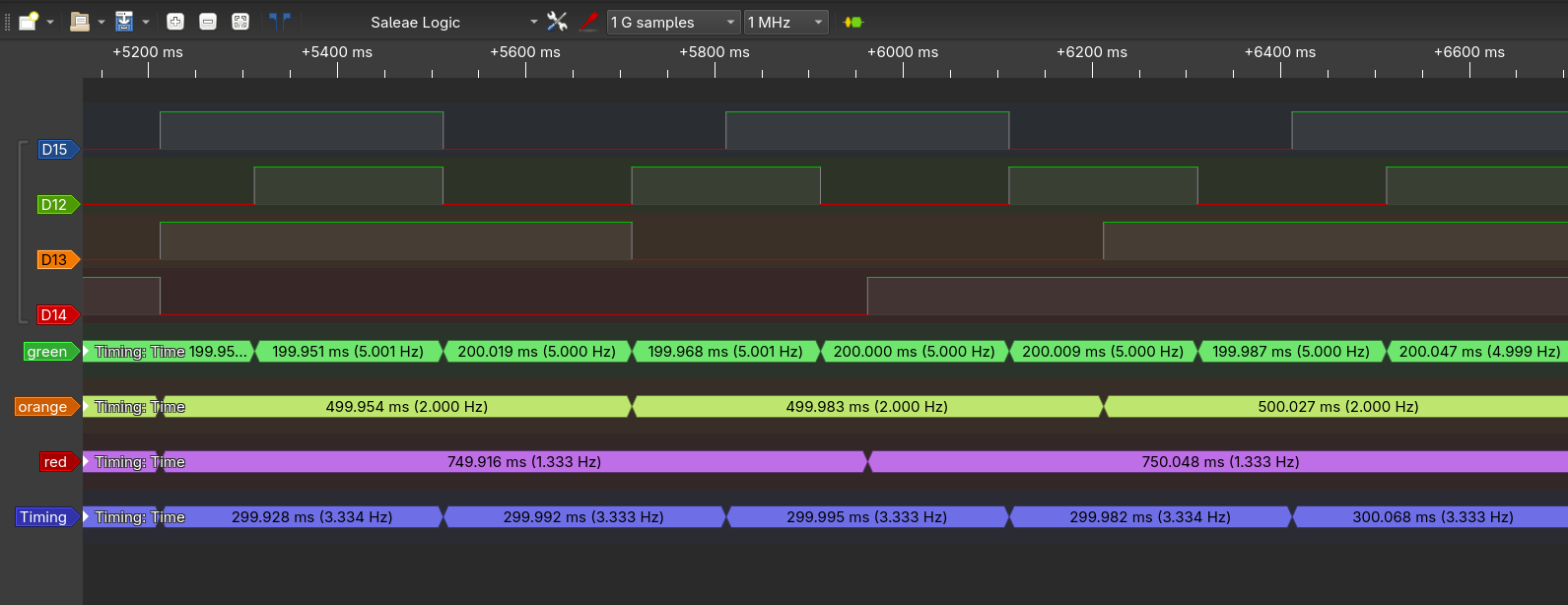
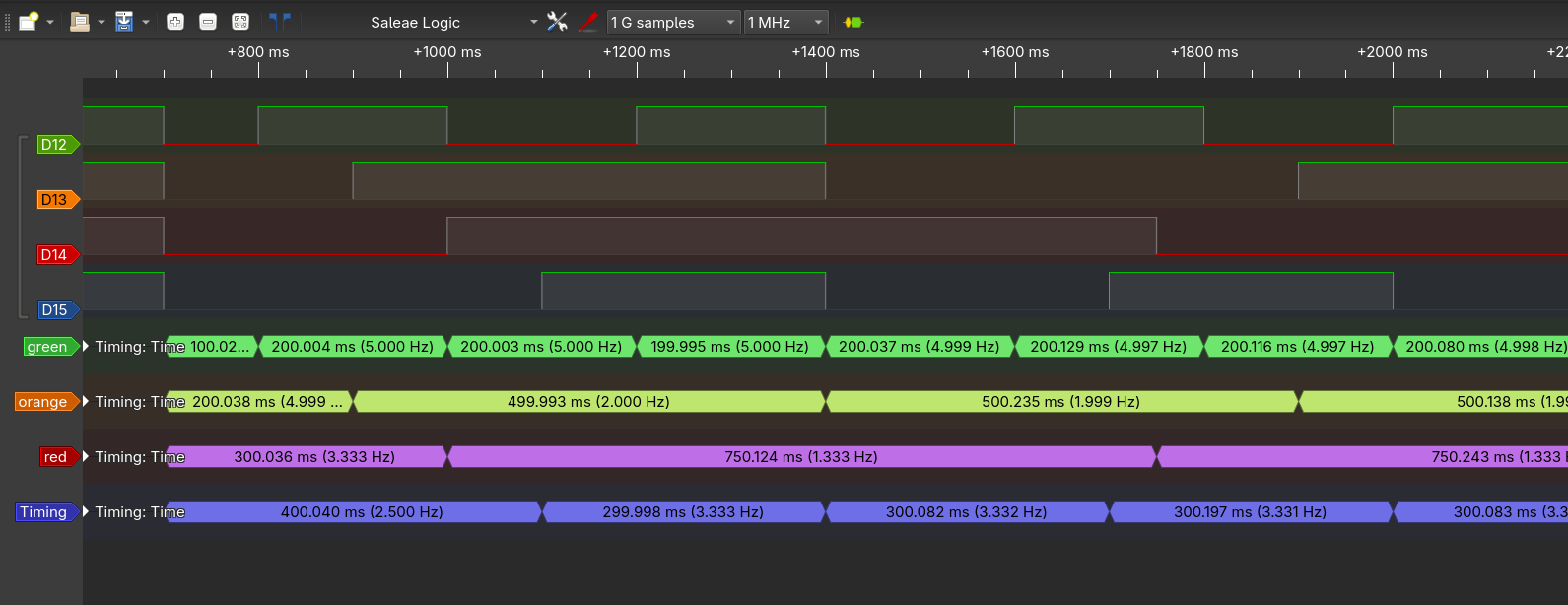
> - Use `addTask(...)` 4 times to couple each led function to a new task in the task list with periods of: 200 ticks, 500 ticks, 750 ticks, and 300 ticks for green, orange, red, and blue respectively.
|
||||||
|
> - In the SysTick ISR, walk through the task list and decrement each of the task counters.
|
||||||
|
> - Think of, and expand on, the task struct to notify per task whether it is in a WAITING or READY state. Set the state in the ISR depending on the task counter.
|
||||||
|
> - Create a function runReadyTasks() that will walk through the task list and execute any task in the READY state. Replace your switch-case rotation in the function main with a call to this function.
|
||||||
|
> - Make use of a logic analyzer to verify the timing of the tasks
|
||||||
|
|
||||||
|
```c {.numberLines}
|
||||||
#include <stdint.h>
|
#include <stdint.h>
|
||||||
#include <stm32f4xx.h>
|
#include <stm32f4xx.h>
|
||||||
#include <stdbool.h>
|
#include <stdbool.h>
|
||||||
@@ -278,9 +314,9 @@ int main(void)
|
|||||||
volatile uint32_t ISR_Ticks = 0;
|
volatile uint32_t ISR_Ticks = 0;
|
||||||
|
|
||||||
struct TASK {
|
struct TASK {
|
||||||
void* fn,
|
void (*fn)(void);
|
||||||
uint32_t counter,
|
uint32_t counter;
|
||||||
uint32_t counter_rst
|
uint32_t counter_rst;
|
||||||
};
|
};
|
||||||
|
|
||||||
uint8_t Tasks_len = 0;
|
uint8_t Tasks_len = 0;
|
||||||
@@ -291,14 +327,14 @@ void SysTick_Handler()
|
|||||||
ISR_Ticks++;
|
ISR_Ticks++;
|
||||||
}
|
}
|
||||||
|
|
||||||
bool addTask(void* fn, uint32_t counter)
|
bool addTask(void (*fn)(void), uint32_t counter)
|
||||||
{
|
{
|
||||||
if (Tasks_len >= 8) {
|
if (Tasks_len >= 8) {
|
||||||
return false;
|
return false;
|
||||||
}
|
}
|
||||||
Tasks[Task_len].fn = fn;
|
Tasks[Tasks_len].fn = fn;
|
||||||
Tasks[Task_len].counter = counter;
|
Tasks[Tasks_len].counter = counter;
|
||||||
Tasks[Task_len].counter_rst = counter;
|
Tasks[Tasks_len].counter_rst = counter;
|
||||||
Tasks_len++;
|
Tasks_len++;
|
||||||
return true;
|
return true;
|
||||||
}
|
}
|
||||||
@@ -340,11 +376,11 @@ int main(void)
|
|||||||
| GPIO_MODER_MODER15_0;
|
| GPIO_MODER_MODER15_0;
|
||||||
// Set all leds off
|
// Set all leds off
|
||||||
GPIOD->ODR = 0;
|
GPIOD->ODR = 0;
|
||||||
|
|
||||||
|
|
||||||
// SysTick enable with interupt and clk source to AHB/8
|
// SysTick enable with interupt and clk source to AHB/8
|
||||||
SysTick->CTRL = SysTick_CTRL_TICKINT_Msk | SysTick_CTRL_ENABLE_Msk;
|
SysTick->CTRL = SysTick_CTRL_TICKINT_Msk | SysTick_CTRL_ENABLE_Msk;
|
||||||
SysTick->LOAD = 1000; // 1 ms / (8 MHz / 8)
|
SysTick->LOAD = 2000; // 1 ms / (16 MHz / 8)
|
||||||
|
|
||||||
addTask(*taskGreen, 200);
|
addTask(*taskGreen, 200);
|
||||||
addTask(*taskOrange, 500);
|
addTask(*taskOrange, 500);
|
||||||
@@ -355,14 +391,15 @@ int main(void)
|
|||||||
while (1)
|
while (1)
|
||||||
{
|
{
|
||||||
// Wait a moment
|
// Wait a moment
|
||||||
while (ISR_Ticks != 0)
|
while (ISR_Ticks == 0)
|
||||||
{
|
{
|
||||||
__asm__(" WFI"); // sleep until SysTick
|
__asm__(" WFI"); // sleep until SysTick
|
||||||
}
|
}
|
||||||
uint32_t ticks = ISR_Ticks;
|
uint32_t ticks = ISR_Ticks;
|
||||||
ISR_Ticks = 0;
|
ISR_Ticks = 0;
|
||||||
|
|
||||||
for (uint8_t int=0; i<Tasks_len; i++)
|
// decrement all counters
|
||||||
|
for (uint8_t i=0; i<Tasks_len; i++)
|
||||||
{
|
{
|
||||||
if (Tasks[i].counter > ticks)
|
if (Tasks[i].counter > ticks)
|
||||||
{
|
{
|
||||||
@@ -374,13 +411,161 @@ int main(void)
|
|||||||
}
|
}
|
||||||
}
|
}
|
||||||
|
|
||||||
for (uint8_t int=0; i<Tasks_len; i++)
|
// rust all tasks where the counter has run out
|
||||||
|
for (uint8_t i=0; i<Tasks_len; i++)
|
||||||
{
|
{
|
||||||
if (Tasks[i].counter == 0)
|
if (Tasks[i].counter == 0)
|
||||||
{
|
{
|
||||||
(&(Tasks[i].fn))();
|
Tasks[i].fn();
|
||||||
|
Tasks[i].counter = Tasks[i].counter_rst;
|
||||||
}
|
}
|
||||||
}
|
}
|
||||||
}
|
}
|
||||||
}
|
}
|
||||||
```
|
```
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
## Assignment 3.7
|
||||||
|
|
||||||
|
> Now add initial delays5 (in systicks) to your tasks. Use an initial delay of 100, 200, 300, and 400 for green, orange, red, and blue respectively. Make use of a logic analyzer to verify the timing.
|
||||||
|
|
||||||
|
When A task is created, in the version of [[#Assignment 3.7]], the folloing function is used:
|
||||||
|
|
||||||
|
```c
|
||||||
|
bool addTask(void (*fn)(void), uint32_t counter)
|
||||||
|
{
|
||||||
|
if (Tasks_len >= 8) {
|
||||||
|
return false;
|
||||||
|
}
|
||||||
|
Tasks[Tasks_len].fn = fn;
|
||||||
|
Tasks[Tasks_len].counter = counter;
|
||||||
|
Tasks[Tasks_len].counter_rst = counter;
|
||||||
|
Tasks_len++;
|
||||||
|
return true;
|
||||||
|
}
|
||||||
|
```
|
||||||
|
|
||||||
|
Here the `counter` and `counter_rst` menbers are set to the same value. `counter` is the counter that is decremented eacht SysClock. `counter_rst` is the value `counter` is reset to if it reachts 0 after the task is run.
|
||||||
|
|
||||||
|
Setting `counter` to the initail delay already solves this assignment. The foloing code implements this change.
|
||||||
|
|
||||||
|
```c {.numberLines}
|
||||||
|
#include <stdint.h>
|
||||||
|
#include <stm32f4xx.h>
|
||||||
|
#include <stdbool.h>
|
||||||
|
|
||||||
|
volatile uint32_t ISR_Ticks = 0;
|
||||||
|
|
||||||
|
struct TASK {
|
||||||
|
void (*fn)(void);
|
||||||
|
uint32_t counter;
|
||||||
|
uint32_t counter_rst;
|
||||||
|
};
|
||||||
|
|
||||||
|
uint8_t Tasks_len = 0;
|
||||||
|
struct TASK Tasks[8];
|
||||||
|
|
||||||
|
void SysTick_Handler()
|
||||||
|
{
|
||||||
|
ISR_Ticks++;
|
||||||
|
}
|
||||||
|
|
||||||
|
bool addTask(void (*fn)(void), uint32_t counter, uint32_t counter_init)
|
||||||
|
{
|
||||||
|
if (Tasks_len >= 8) {
|
||||||
|
return false;
|
||||||
|
}
|
||||||
|
Tasks[Tasks_len].fn = fn;
|
||||||
|
Tasks[Tasks_len].counter = counter_init;
|
||||||
|
Tasks[Tasks_len].counter_rst = counter;
|
||||||
|
Tasks_len++;
|
||||||
|
return true;
|
||||||
|
}
|
||||||
|
|
||||||
|
void taskGreen()
|
||||||
|
{
|
||||||
|
GPIOD->ODR ^= GPIO_ODR_OD12;
|
||||||
|
}
|
||||||
|
|
||||||
|
void taskOrange()
|
||||||
|
{
|
||||||
|
GPIOD->ODR ^= GPIO_ODR_OD13;
|
||||||
|
}
|
||||||
|
|
||||||
|
void taskRed()
|
||||||
|
{
|
||||||
|
GPIOD->ODR ^= GPIO_ODR_OD14;
|
||||||
|
}
|
||||||
|
|
||||||
|
void taskBlue()
|
||||||
|
{
|
||||||
|
GPIOD->ODR ^= GPIO_ODR_OD15;
|
||||||
|
}
|
||||||
|
|
||||||
|
enum STATE {
|
||||||
|
STATE_GREEN,
|
||||||
|
STATE_ORANGE,
|
||||||
|
STATE_RED
|
||||||
|
};
|
||||||
|
|
||||||
|
int main(void)
|
||||||
|
{
|
||||||
|
// GPIO Port D Clock Enable
|
||||||
|
RCC->AHB1ENR = RCC_AHB1ENR_GPIODEN;
|
||||||
|
// GPIO Port D Pin 15 down to 12 Push/Pull Output
|
||||||
|
GPIOD->MODER = GPIO_MODER_MODER12_0
|
||||||
|
| GPIO_MODER_MODER13_0
|
||||||
|
| GPIO_MODER_MODER14_0
|
||||||
|
| GPIO_MODER_MODER15_0;
|
||||||
|
// Set all leds off
|
||||||
|
GPIOD->ODR = 0;
|
||||||
|
|
||||||
|
|
||||||
|
// SysTick enable with interupt and clk source to AHB/8
|
||||||
|
SysTick->CTRL = SysTick_CTRL_TICKINT_Msk | SysTick_CTRL_ENABLE_Msk;
|
||||||
|
SysTick->LOAD = 2000; // 1 ms / (16 MHz / 8)
|
||||||
|
|
||||||
|
addTask(*taskGreen, 200, 100);
|
||||||
|
addTask(*taskOrange, 500, 200);
|
||||||
|
addTask(*taskRed, 750, 300);
|
||||||
|
addTask(*taskBlue, 300, 400);
|
||||||
|
|
||||||
|
// Do forever:
|
||||||
|
while (1)
|
||||||
|
{
|
||||||
|
// Wait a moment
|
||||||
|
while (ISR_Ticks == 0)
|
||||||
|
{
|
||||||
|
__asm__(" WFI"); // sleep until SysTick
|
||||||
|
}
|
||||||
|
uint32_t ticks = ISR_Ticks;
|
||||||
|
ISR_Ticks = 0;
|
||||||
|
|
||||||
|
// decrement all counters
|
||||||
|
for (uint8_t i=0; i<Tasks_len; i++)
|
||||||
|
{
|
||||||
|
if (Tasks[i].counter > ticks)
|
||||||
|
{
|
||||||
|
Tasks[i].counter -= ticks;
|
||||||
|
}
|
||||||
|
else
|
||||||
|
{
|
||||||
|
Tasks[i].counter = 0;
|
||||||
|
}
|
||||||
|
}
|
||||||
|
|
||||||
|
// rust all tasks where the counter has run out
|
||||||
|
for (uint8_t i=0; i<Tasks_len; i++)
|
||||||
|
{
|
||||||
|
if (Tasks[i].counter == 0)
|
||||||
|
{
|
||||||
|
Tasks[i].fn();
|
||||||
|
Tasks[i].counter = Tasks[i].counter_rst;
|
||||||
|
}
|
||||||
|
}
|
||||||
|
}
|
||||||
|
}
|
||||||
|
```
|
||||||
|
|
||||||
|
|
||||||
|
|||||||
80
report-2/week_1.4.md
Normal file
80
report-2/week_1.4.md
Normal file
@@ -0,0 +1,80 @@
|
|||||||
|
|
||||||
|
# Week 1.4
|
||||||
|
|
||||||
|
## Assinment 4.1
|
||||||
|
|
||||||
|
> The teacher has built a simple preemptive OS that is still missing some important features. In these assignments you’ll implement some extra features and gain a bigger understanding in how an OS operates. Next week we’ll start using a fully developed RTOS with all necessary features for a production environment.
|
||||||
|
> A) Download the project VersdOS.zip.
|
||||||
|
> B) Import this project, Open and Finish. Build and debug the project. The LEDs should blink.
|
||||||
|
> C) Browse through the code and especially make sure you understand the scheduling process and the context switch.
|
||||||
|
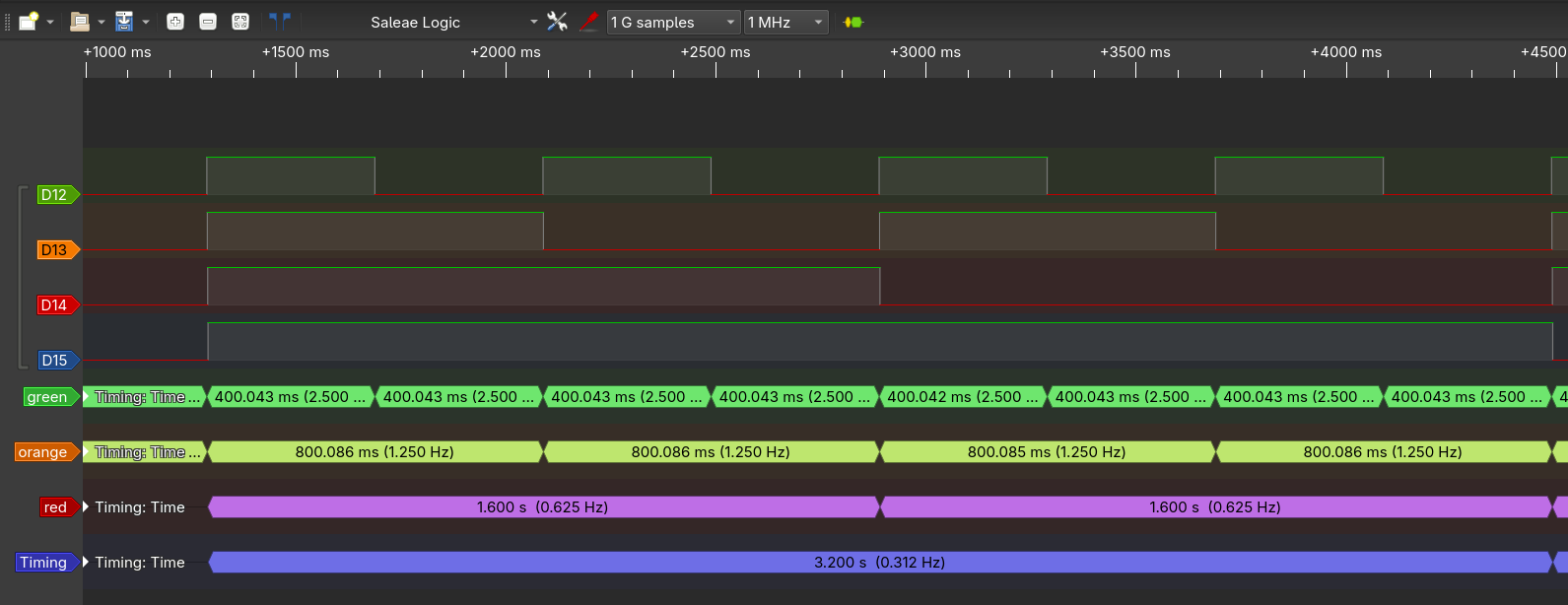
> D) Measure the periods at which the LEDs toggle using a logic analyzer and explain why this is not 2× but 8× the `blocking_delay` time.
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
In the Code it the values for blocking delay are 100, 200, 400, 800 for green, orange, red, blue. The `blocking_delay` function wait for this number of SysTicks, witch is set to $1ms$. I measure delays of $0.4s$, $0.8s$, $1.6s$ and $3.2s$. This is indeed 4x slower of what I would expect on first flance. This delay is becouse this is a preemtive scheduler, the other tasks run in between. There are 4 task all with the same priority, so each task takes 4 time longer.
|
||||||
|
|
||||||
|
## Assignment 4.2
|
||||||
|
|
||||||
|
> A) mplement a non-blocking delay so that a task can request the OS to be kept out of the scheduling loop for a certain number of system ticks. The scheduler should remain preemptive and perform round-robin on all the available(not delayed) tasks. Once the requested number of system ticks have passed, the scheduler should include the task in the selection process. You may use the `taskYield()` function to let the OS know a task is ready to be switched out.
|
||||||
|
|
||||||
|
To allow for a non blocking delay the OS sould keep track of the time the to wake it up on the corect time. I did this by adding the new task state `SLEEPING_DELAY` to the enum.
|
||||||
|
|
||||||
|
There already is an counter in the task struct. but no function that decrements this counter. So I added the folloing function the the OS.
|
||||||
|
|
||||||
|
```c
|
||||||
|
void decrement_sleeping_delay()
|
||||||
|
{
|
||||||
|
for (usize_t i=0; i < MAX_TASKS; i++)
|
||||||
|
{
|
||||||
|
if (taskList[i].state == SLEEPING_DELAY)
|
||||||
|
{
|
||||||
|
if (taskList[i].counter == 0)
|
||||||
|
{
|
||||||
|
taskList[i].state = READY;
|
||||||
|
}
|
||||||
|
else
|
||||||
|
{
|
||||||
|
taskList[i].counter--;
|
||||||
|
}
|
||||||
|
}
|
||||||
|
}
|
||||||
|
}
|
||||||
|
```
|
||||||
|
|
||||||
|
This function is added to the `SysTick_Handeler` before the cudeule is run. So that if the counter is 0 the `decrement_sleeping_delay` makes the task ready again, and waits one more SysTick.
|
||||||
|
|
||||||
|
The `SysTick_Handeler` now look like the folloing
|
||||||
|
|
||||||
|
```c
|
||||||
|
void SysTick_Handler(void)
|
||||||
|
{
|
||||||
|
SysTick_flag = true;
|
||||||
|
//decrement counter for task in SLEEPING_DELAY
|
||||||
|
decrement_sleeping_delay();
|
||||||
|
//select the next task
|
||||||
|
taskToExecute = schedule();
|
||||||
|
//request context switch
|
||||||
|
SCB->ICSR |= (1<<28);
|
||||||
|
}
|
||||||
|
```
|
||||||
|
|
||||||
|
Before stating to write the delay function for the tasks, in the `schedule` funciton the line that sets the current task to ready sould be removed (line 163 in `VersdOS.c`). If the state is chanced during execution of the task, this line reset is at the next try to reschedule ths state back to `READY` so the state will never actualy be changed.
|
||||||
|
|
||||||
|
As last the delay function itself.
|
||||||
|
|
||||||
|
```c
|
||||||
|
void delay(uint32_t ticks)
|
||||||
|
{
|
||||||
|
currentTask->state = SLEEPING_DELAY;
|
||||||
|
currentTask->counter = ticks;
|
||||||
|
taskYield();
|
||||||
|
}
|
||||||
|
```
|
||||||
|
|
||||||
|
Now all the line `extern void delay(uint32_t ticks);` can be added to the begin the `main.c` and all the `blocking_delay` calls can be replace by `delay`.
|
||||||
|
|
||||||
|
### Result
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
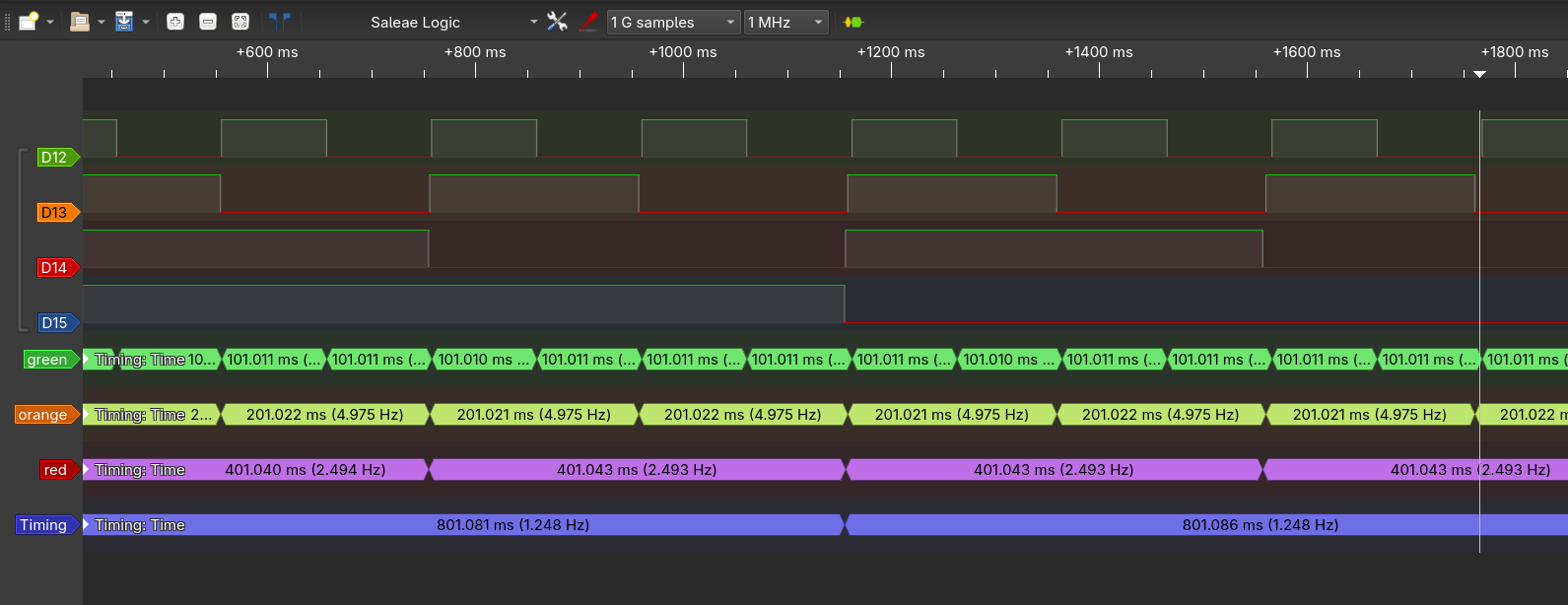
This implementation works, only the delays are a bit off. To make it a nice counter again all delays should be decremented by one.
|
||||||
Reference in New Issue
Block a user