5.5 KiB
5.5 KiB
| sub_title | tags | auther | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Superlight Personal Carrier |
|
|
Unit Testen Stabilisatie
Voedingen
Benodigdheden
- 12V voeding
Procedure
- snel de voeding in op 12V met een stroom berensing van 50 mA
- sluit de 12V voeding aan op de 12V en GND ingnangen op de driver
- meet de uitgangen van de twee voedingen, vul de tabel hieronder in
5V |
3.3V |
|
|---|---|---|
| minimaal | 4.5V |
3.0V |
| maximaal | 5.5V |
3.6V |
| gemeeten | 5.01V |
3.323V |
Geslaagd: ja
opmergingen: in idel de er wordt 28mA aan stroom verbruikt vanaf de 12V voeding
Microcontroller
Benodigdheden
- 12V voeding als de voedingen werken, anders met een 5V en 3.3v voeding
- computer met Arduino IDE geinstaleerd
- USB B kabel naar de computer
- ledje met bijhoren de weerstand voor 3.3V
Procedure
- sluit een ledje aan op een van de GPIO pinnen
- snel de voeding in op
12Vmet een stroom berensing van 150 mA - sluit de
12Vvoeding aan op de12Ven GND ingnangen op de driver - sluit de USB kabel aan op de computer (dit is veilig omdat de USB alleen verbonden is met ground, de V+ is floating)
- upload een blinky voorbeeld progamma met de GPIO ingesteld van de led
- bekijk of het ledje knippert
Geslaagd: ja
opmergingen: getest met een PWM signaal en osciloscoop i.p.v. een ledje.
Half-brug
Benodigdheden
- als de microcontroller werkt:
12Vvoeding als de voedingen werken, anders met een5Ven3.3vvoeding30Vvoor V Motor- computer met Arduino IDE geïnstalleerd
- USB B kabel naar de computer
- oscilloscope
- zo niet:
10Vvoor V motor- signaal generator met twee kanalen
- oscilloscope
procedure
- sluit de oscilloscope aan op een van de uitgangen van de drijver (er komt
30Vop te staan, beruik de juiste probe; geen juiste probe bij de hand, zet de voeding voor V motor wat lager) - snel de voeding in op
12Vmet een stroom begrenzing van150 mA - sluit de
12Vvoeding aan op de12Ven GND ingangen op de driver - sluit de USB kabel aan op de computer (dit is veilig omdat de USB alleen verbonden is met ground, de V+ is floating)
- upload een test programma die de PWM aanstuurt voor de FET's
- de PWM per half bridge zijn aangesloten op de a en b uitgangen van 1 timer per half brug. zorg dat een van de uitgangen geïnverteerd is en de twee vergelijk waardes zo zijn zodat er een korte dead time is. ze mogen nooit tegelijkertijd hoog zijn!
- bekijk het signaal op de oscilloscope
- herhaal de test voor alle drie de half bruggen
resultaat:
- brug a:
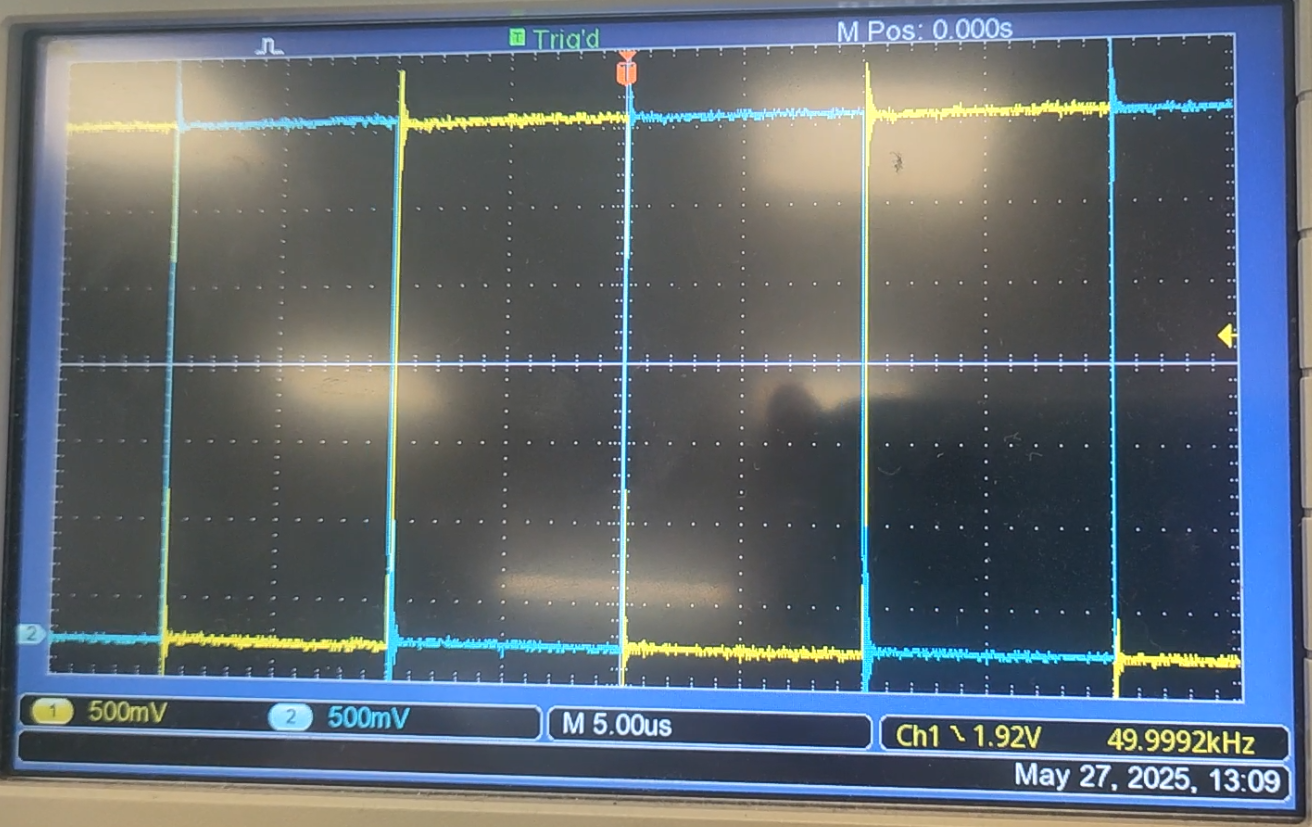
- brug b:
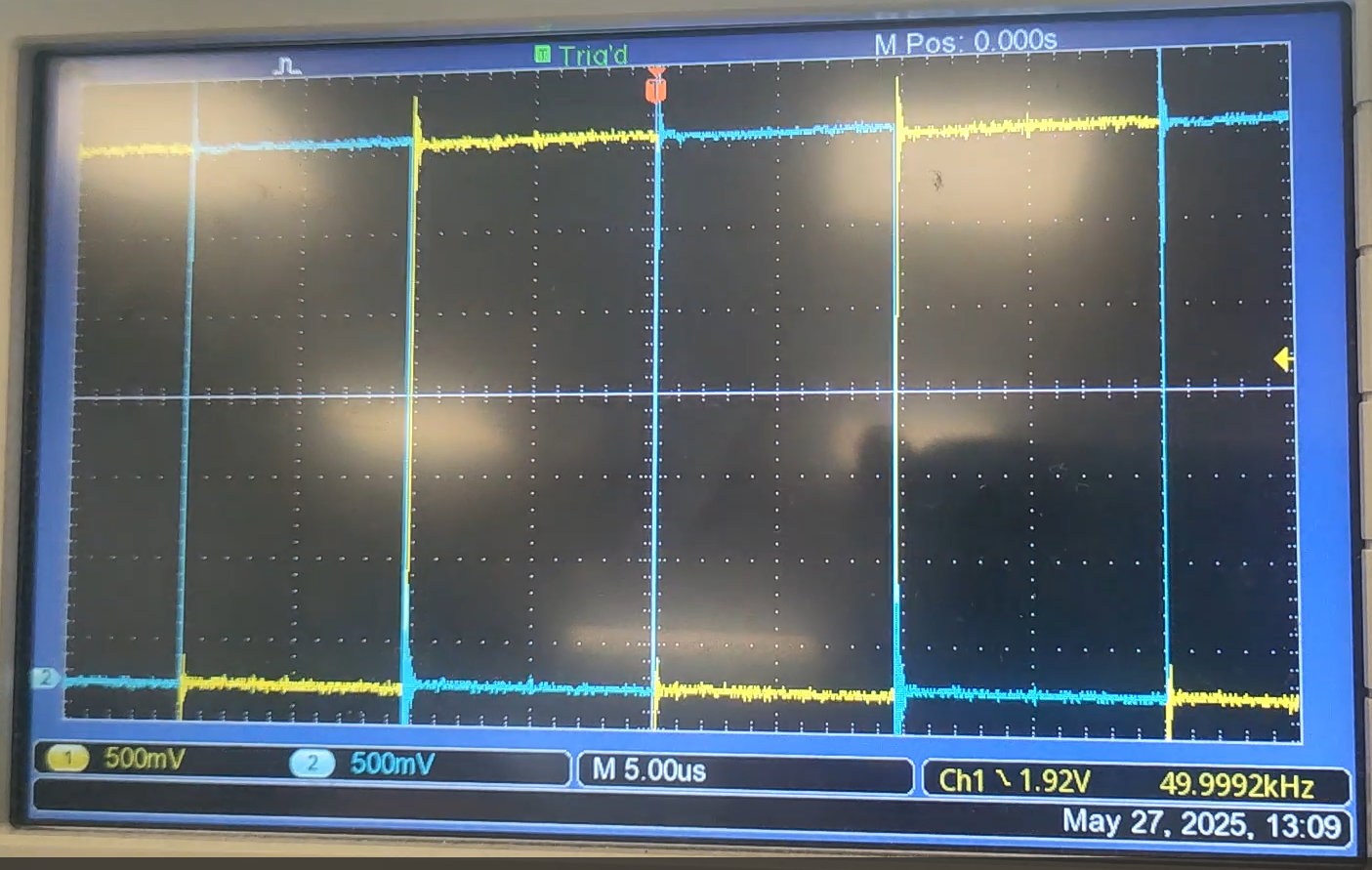
- brug c:
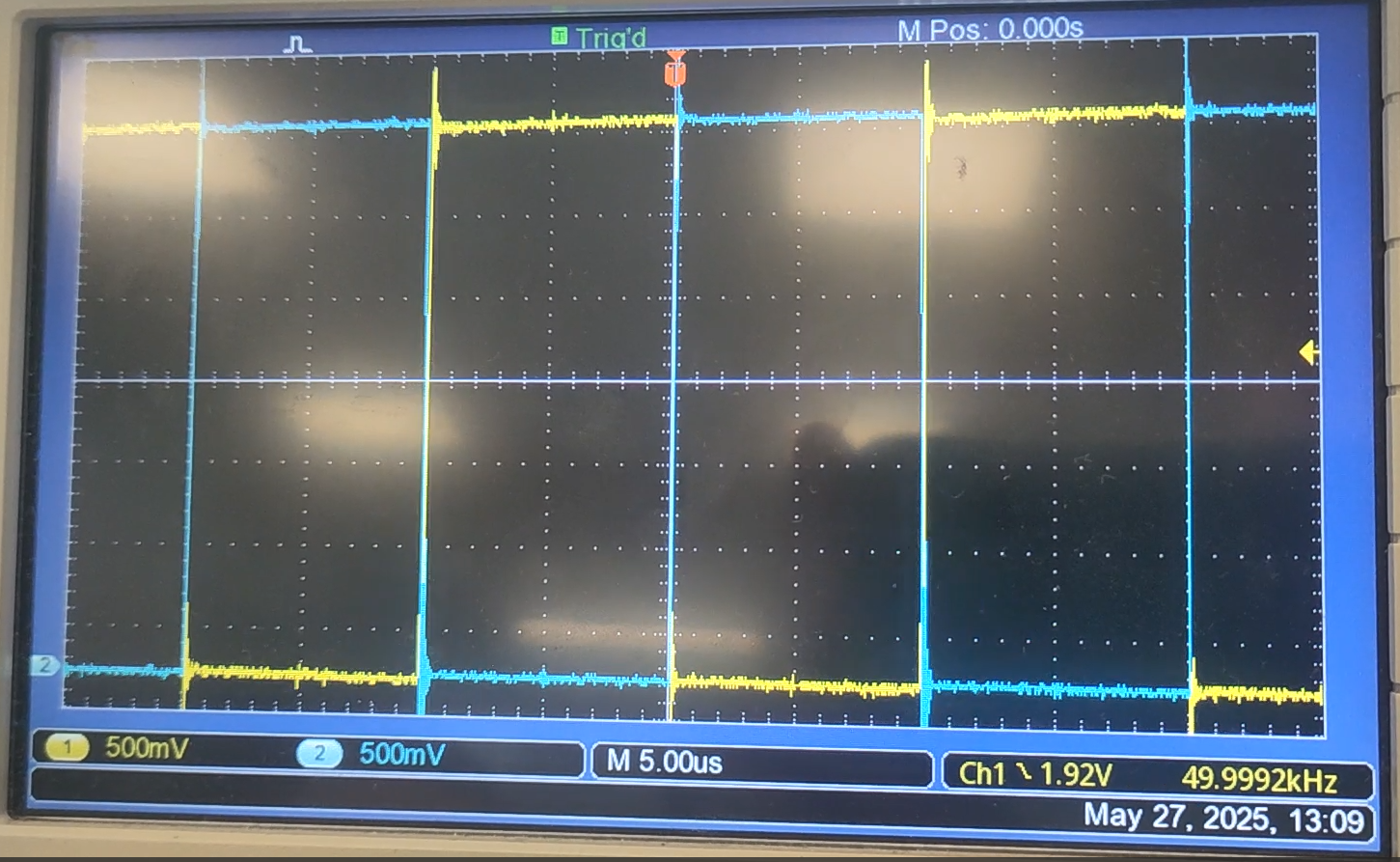
Geslaagd: ja
opmerkingen: Er is een klein beetje ringing, maar het lijkt nog niet te veel dat dit problemen kan veroorzaken.
IMU
benodigdheden
- een microcontroller met I2C (kan de motoro driver zelf zijn)
- computer met Arduino IDE geinstaleerd
- USB B kabel naar de computer
procedure
- sluit de IMU aan op de motor driver
- snel de voeding in op 12V met een stroom berensing van 150 mA
- sluit de 12V voeding aan op de 12V en GND ingnangen op de driver
- sluit de USB kabel aan op de computer (dit is veilig omdat de USB alleen verbonden is met ground, de V+ is floating)
- upload een blinky voorbeeld progamma met de GPIO ingesteld van de led
- bekijk de serial plotter terwel je de IMU draait.
Geslaagd:
opmergingen:
stroom meting
benodigdheden
- 12V voeding (of 5V bij beperking van beschikbaare voedingen)
- voeding die 50A kan leveren (of zoveel mogenlijk) voor V motor
- bij voorkeur een load die de
50A_{DC}kan op nemen, ander kan de uitgang korgesloten worden als de voeding dat toestaat. - multimeter
- computer met Arduino IDE geinstaleerd
- USB B kabel naar de computer
procedure
- sluit de load aan op deen van de uitgangen van de motor driver
- snel de voeding in op 12V met een stroom berensing van 150 mA
- sluit de 12V voeding aan op de 12V en GND ingnangen op de driver
- sluit de USB kabel aan op de computer (dit is veilig omdat de USB alleen verbonden is met ground, de V+ is floating)
- upload een programma die alle high side fet's dicht zet en de low side fet's open
- sluit de voeding voor V motor aan
- meet uitgang van de stroom meeting
- zet de v motor voeding uit en verlaats de load naar een andere uitgang
- zet de voeding weer aan en meet de stroom meting
- herhaal dit voor de laaste uitgang
TODO: add meet table
Geslaagd:
opmergingen:
encoder
benodigdheden
- een microcontroller met I2C (kan de motoro driver zelf zijn)
- computer met Arduino IDE geinstaleerd
- USB B kabel naar de computer
procedure
- sluit de Encoder aan op de motor driver
- snel de voeding in op 12V met een stroom berensing van 150 mA
- sluit de 12V voeding aan op de 12V en GND ingnangen op de driver
- sluit de USB kabel aan op de computer (dit is veilig omdat de USB alleen verbonden is met ground, de V+ is floating)
- upload een voorbeeld progamma voor de encoder.
- bekijk de serial plotter terwel je de magneer van de encoder draait
Geslaagd:
opmergingen: