updates
This commit is contained in:
1
.gitignore
vendored
1
.gitignore
vendored
@@ -2,3 +2,4 @@
|
||||
/build
|
||||
/pdf
|
||||
.obsidian
|
||||
.trash
|
||||
|
||||
@@ -37,6 +37,8 @@ do
|
||||
-e 's|^# |\\newpage\n# |' \
|
||||
-e 's|^## |\\newpage\n## |' \
|
||||
-e 's|\[\([^]]*\)\](#\([^)]*\))|[\1](#\L\2)|' \
|
||||
-e 's|^> \[!todo\]|> \\textcolor{cyan}{TODO:}|' \
|
||||
-e 's|^> \[!warn\]|> \\textcolor{orange}{WARNING:}|' \
|
||||
-e "s|https://live.kladjes.nl/uploads|${BASE_DIR}/latex/images|" \
|
||||
-e "s|\`\`\`mermaid|\`\`\`{.mermaid loc=${BASE_DIR}/latex/images/$(basename "$md_src")}|"
|
||||
download_images "$BUILD_DIR/$md_src"
|
||||
@@ -57,6 +59,8 @@ sed -i "$TEMP_MD_FILE" \
|
||||
-e 's|^#||' \
|
||||
-e 's|^# |\\newpage\n# |' \
|
||||
-e 's|\[\([^]]*\)\](#\([^)]*\))|[\1](#\L\2)|' \
|
||||
-e 's|^> \[!todo\]|> \\textcolor{cyan}{TODO:}|' \
|
||||
-e 's|^> \[!warn\]|> \\textcolor{orange}{WARNING:}|' \
|
||||
-e "s|https://live.kladjes.nl/uploads|${BASE_DIR}/latex/images|" \
|
||||
-e "s|\`\`\`mermaid|\`\`\`{.mermaid loc=${BASE_DIR}/latex/images/$(basename "$MD_FILE")}|"
|
||||
|
||||
|
||||
1
makefile
1
makefile
@@ -228,6 +228,7 @@ pdf/projectdocument.booklet.pdf: converters/bookletify.latex pdf/projectdocument
|
||||
mv build/projectdocument.booklet/bookletify.pdf pdf/projectdocument.booklet.pdf
|
||||
|
||||
package: pdf/projectdocument.pdf pdf/competenties.pdf externe_bijlagen/*
|
||||
test -d build/export && rm -r build/export
|
||||
mkdir -p build/export
|
||||
cp externe_bijlagen/* build/export/
|
||||
cp pdf/projectdocument.pdf build/export/verslag.pdf
|
||||
|
||||
@@ -18,9 +18,9 @@ auther:
|
||||
|
||||
## Analyseren (8)
|
||||
|
||||
Hoofdstuk 3 van het verslag wordt uitgelegd hoe de analyse is gedaan. Ik heb in deze fase de voortouw genomen en het PVE gemaakt en beheerd.
|
||||
Hoofdstuk 3 van `verslag.pdf` wordt uitgelegd hoe de analyse is gedaan. Ik heb in deze fase de voortouw genomen en het PVE gemaakt en beheerd.
|
||||
|
||||
Daarnaast heb ik ook geanalyseerd voor de stabilisatie unit zelf (hoofdstuk 6 in het verslag; of 8.3.2 voor een uitgebreidere variant). Hier heb ik samen met Tijn de motor keuze gemaakt, en alle berekeningen over de motor heb ik zelf gedaan.
|
||||
Daarnaast heb ik ook geanalyseerd voor de stabilisatie unit zelf (hoofdstuk 6 in `verslag.pdf`; of 8.3.2 voor een uitgebreidere variant). Hier heb ik samen met Tijn de motor keuze gemaakt, en alle berekeningen over de motor heb ik zelf gedaan.
|
||||
|
||||
## Ontwerpen (8)
|
||||
|
||||
@@ -30,7 +30,7 @@ begonnen is. Dus ik heb het ontwerp alleen gedaan. Chirs, de enige andere van
|
||||
elektrotechniek, heeft niet veel ervaring van het ontwerpen van motordrivers,
|
||||
dus ik dacht dat het uitleggen hoe het moet meer tijd kost dan het zelf doen.
|
||||
|
||||
zie hoofdstuk 6 van het projectdocument of 8.3 voor het detailontwerp.
|
||||
zie hoofdstuk 6 van `verslag.pdf` of 8.3 voor het detailontwerp.
|
||||
|
||||
## Realiseren (O)
|
||||
|
||||
|
||||
@@ -168,7 +168,7 @@ Volgens Max Kappert(student automotive engineer) hebben we de volgende
|
||||
parameters gekregen die we nodig hebben om het voertuig te kunnen sturen.
|
||||
|
||||
| Parameter | Waarde | Eenheid | Opmerking |
|
||||
| ---------------------- | ------------- | -------- | ----------------------------------------------------------------------------------------------------------- |
|
||||
| ---------------------- | ------------- | -------- | ------------------------------------------------------------- |
|
||||
| Voertuig-spanning | 12 - 14 | $V_{DC}$ | typisch voor auto-VCU's |
|
||||
| Stuurspanning-demperkle | 0 - 5 | $V_{DC}$ | naloge regeling |
|
||||
| PWM-signaal frequentie | 25000 - 30000 | $Hz$ | Typische range voor aansturing |
|
||||
@@ -378,6 +378,7 @@ testen.
|
||||
|
||||
> [!todo]
|
||||
> latere testen toevoegen.
|
||||
|
||||
#### Software
|
||||
|
||||
De Software is geschreven in Rust, deze keuze is gemaakt door de beschikbaarheid an FOC library's.
|
||||
@@ -386,6 +387,7 @@ Er is meer te vinden over de software inclusie onderbouwing waarom keuzes zijn g
|
||||
|
||||
> [!todo]
|
||||
> software in rust, git, software documentatie?
|
||||
|
||||
#### Advies
|
||||
|
||||
> [!todo]
|
||||
|
||||
@@ -51,9 +51,9 @@ opmergingen: in idel de er wordt $28mA$ aan stroom verbruikt vanaf de $12V$ voed
|
||||
#### Procedure
|
||||
|
||||
1. sluit een ledje aan op een van de GPIO pinnen
|
||||
2. snel de voeding in op 12V met een stroom berensing van 150 mA
|
||||
3. sluit de 12V voeding aan op de 12V en GND ingnangen op de driver
|
||||
4. sluit de USB kabel aan op de computer (dit is veilig omdat de USB alleen verbonden is met ground, de V+ is floating)
|
||||
2. snel de voeding in op $12V$ met een stroom berensing van 150 mA
|
||||
3. sluit de $12V$ voeding aan op de $12V$ en GND ingnangen op de driver
|
||||
4. sluit de USB kabel aan op de computer (dit is veilig omdat de USB alleen verbonden is met ground, de _V+_ is floating)
|
||||
5. upload een blinky voorbeeld progamma met de GPIO ingesteld van de led
|
||||
6. bekijk of het ledje knippert
|
||||
|
||||
@@ -67,7 +67,7 @@ opmergingen: getest met een PWM signaal en osciloscoop i.p.v. een ledje.
|
||||
|
||||
- als de microcontroller werkt:
|
||||
- $12V$ voeding als de voedingen werken, anders met een $5V$ en $3.3v$ voeding
|
||||
- $30V$ voor f_V Motor_
|
||||
- $30V$ voor _V Motor_
|
||||
- computer met Arduino IDE geïnstalleerd
|
||||
- USB B kabel naar de computer
|
||||
- oscilloscope
|
||||
@@ -90,10 +90,20 @@ opmergingen: getest met een PWM signaal en osciloscoop i.p.v. een ledje.
|
||||
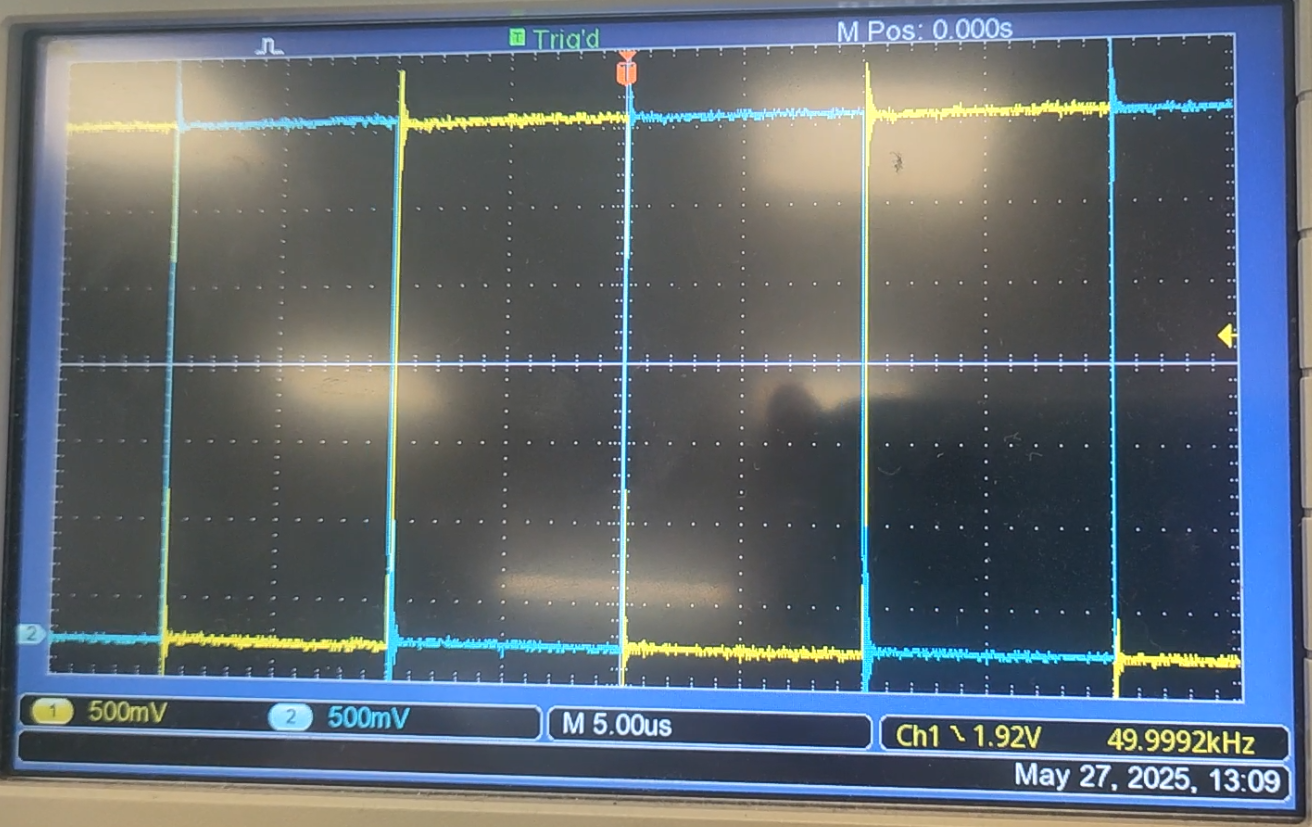
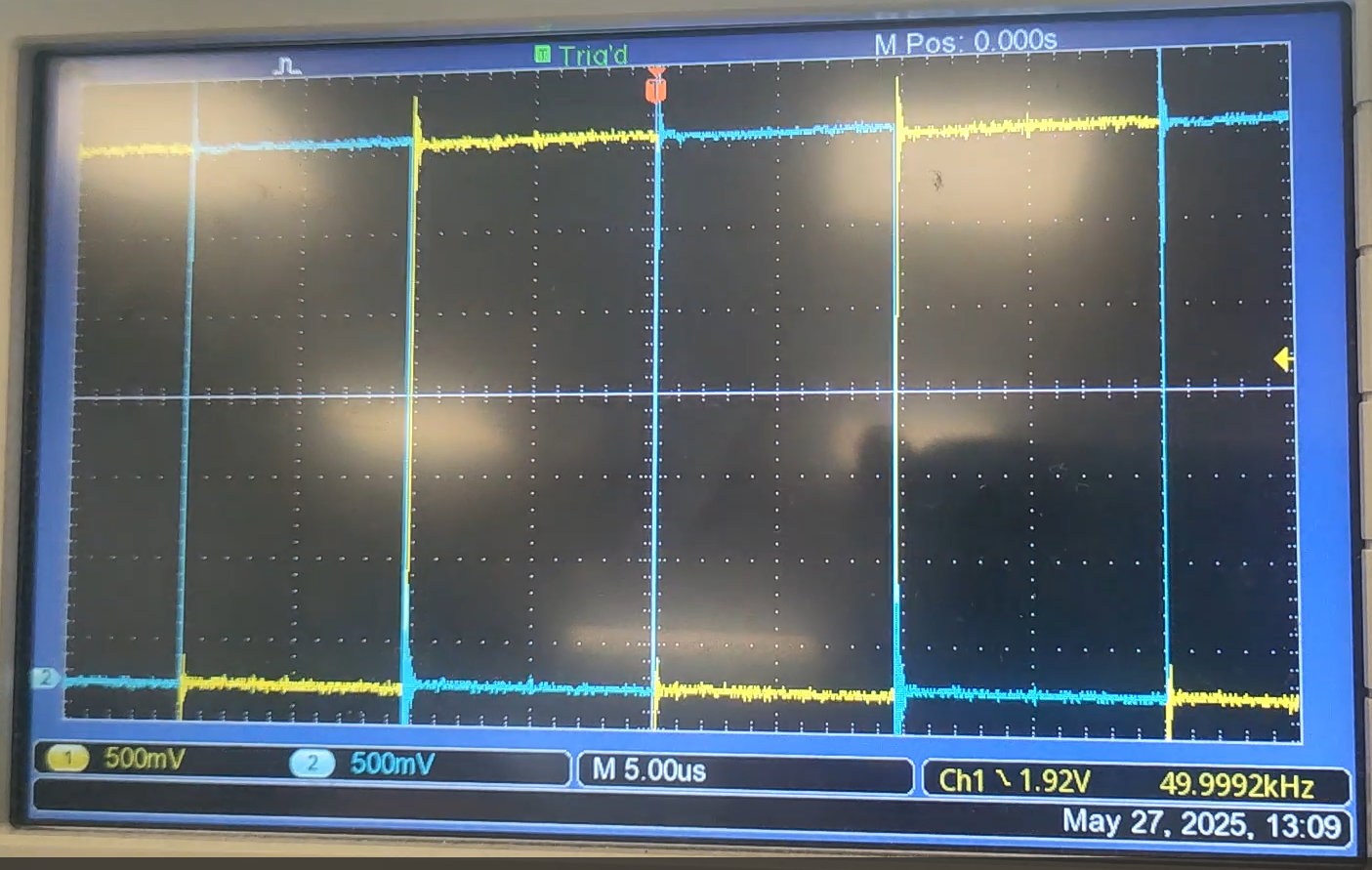
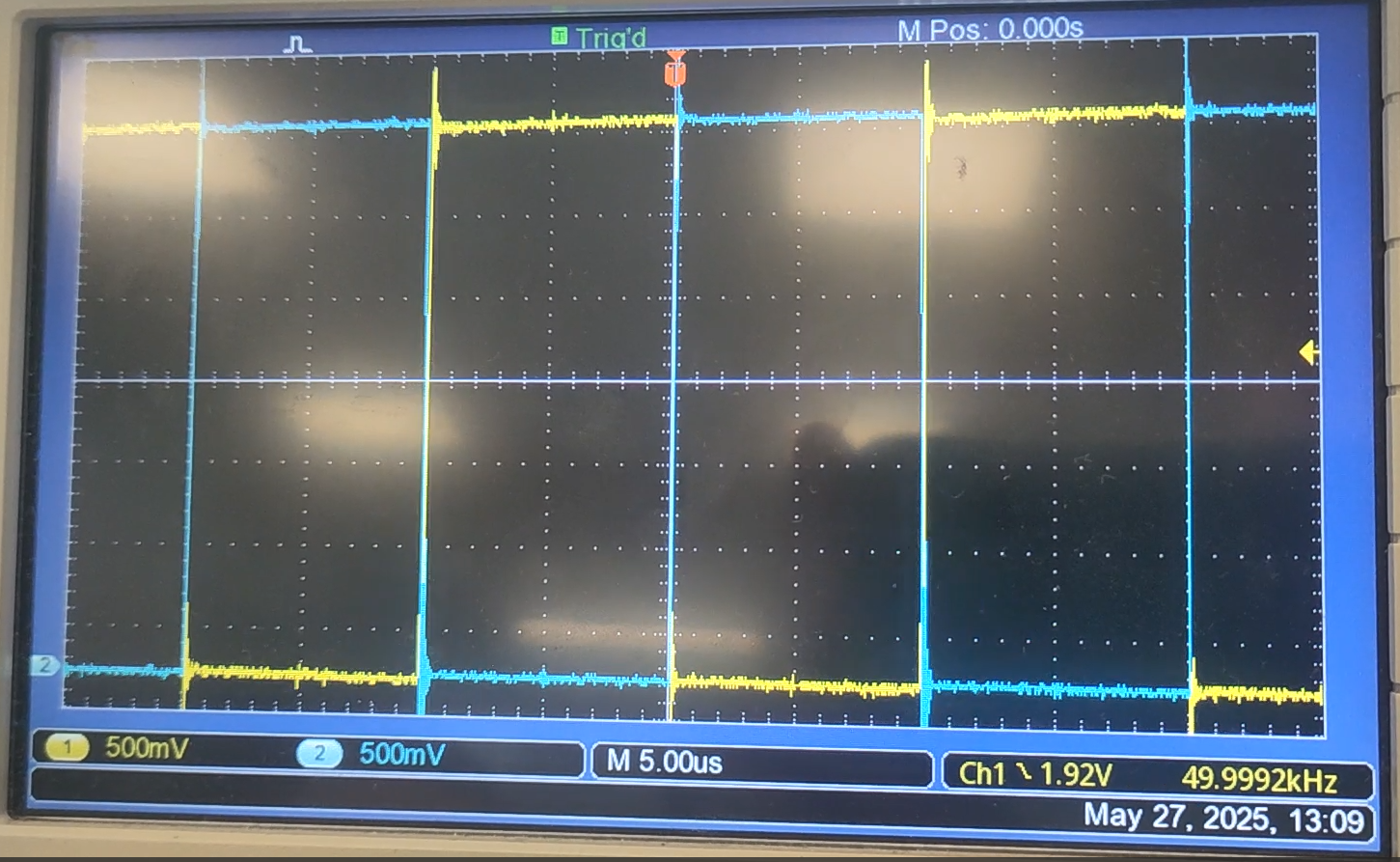
resultaat:
|
||||
|
||||
- brug a:
|
||||
|
||||
|
||||
|
||||
- brug b:
|
||||
|
||||
|
||||
|
||||
- brug c:
|
||||
|
||||
opmerkingen:
|
||||
|
||||
|
||||
Geslaagd: ja
|
||||
|
||||
opmerkingen: Er is een klein beetje ringing, maar het lijkt nog niet te veel dat dit problemen kan veroorzaken.
|
||||
|
||||
### IMU
|
||||
|
||||
|
||||
Reference in New Issue
Block a user