This commit is contained in:
@@ -94,7 +94,8 @@ $I_{noload}$: de stroom die verbruikt wordt als de motor vrij draait
|
||||
|
||||
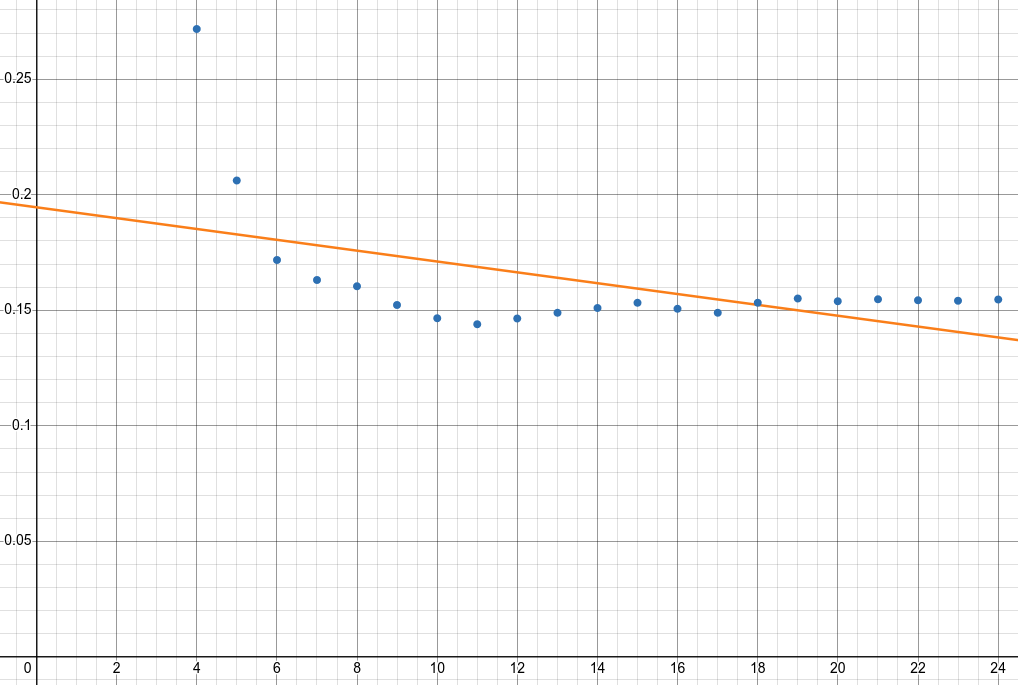
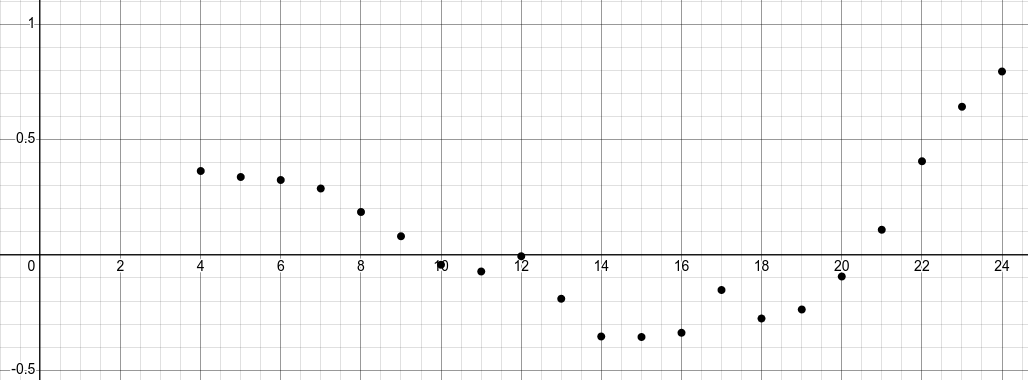
$\tau$ en $I$ is gegeven in de test data. De beste inschatting voor $I_{noload}$ is het gemiddelde van test 1, 2 en 3. Deze hebben allemaal $0.03Nm$ koppel, er is geen informatie hoe deze koppel gemeten is. Om te controleren of dit correct is is een plot gemaakt voor elke regel van de test data.
|
||||
|
||||
|
||||
|
||||
|
||||
|
||||
x as: test nummer
|
||||
y as: koppel constante
|
||||
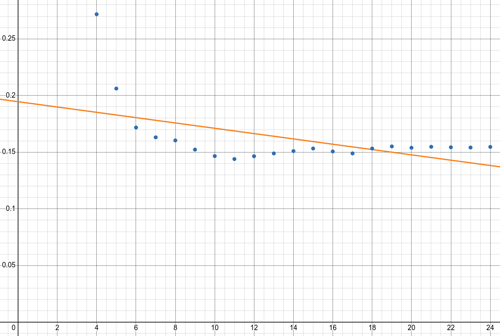
@@ -105,7 +106,8 @@ In deze grafiek is een duidelijke curve te zien aan het begin te zien. Dit duidt
|
||||
|
||||
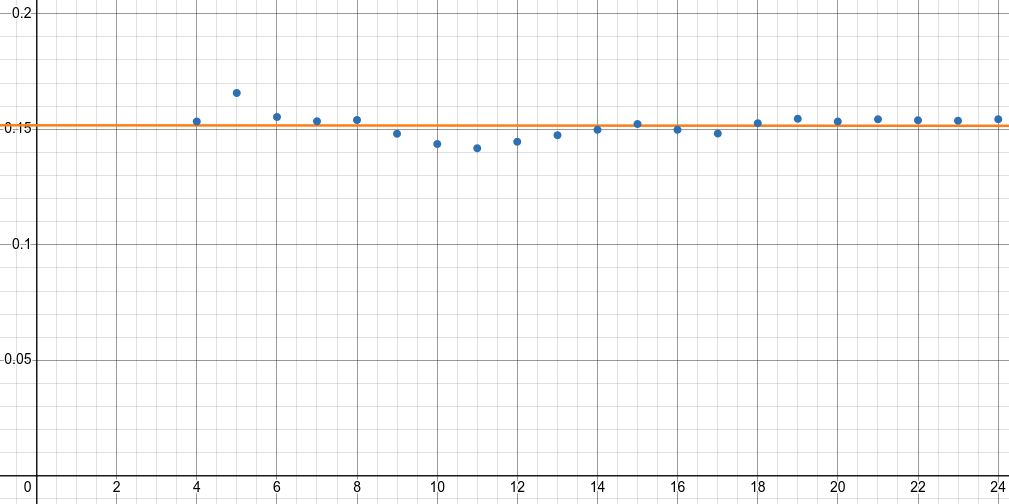
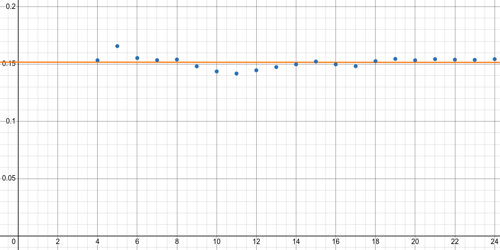
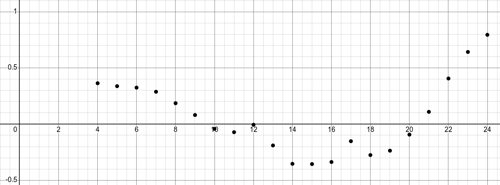
Met $3.52 A$ voor $I_{noload}$ ziet de grafiek er als volgt uit.
|
||||
|
||||
|
||||
|
||||
|
||||
|
||||
Dit is waarschijnlijk dichter bij de werkelijke $I_{noload}$. Het is hier ook te zien dat de koppel constante ongeveer $0.15 Nm/A$ is.
|
||||
|
||||
@@ -160,7 +162,8 @@ $$
|
||||
|
||||
Met de methode gebruikt voor het berekenen van $I_{noload}$ komen we op de waardes $K_v = 69rpm/V$, $R = 170m\Omega$ en $U_{th} = 598mV$. Hieronder is de grafiek van alle spannignserrors met deze waardes
|
||||
|
||||
|
||||
|
||||
|
||||
|
||||
x as: test nummer
|
||||
y as: spannigs error tussen test data en $U=\frac{\omega}{K_v} + \frac{\tau}{K_T} R + U_{th}$
|
||||
@@ -178,7 +181,7 @@ $$
|
||||
I = \frac{\tau}{K_T} + I_{noload} = \frac{\tau}{0.15} + 3.52
|
||||
$$
|
||||
|
||||
| gearbox | snelheid | koppel | spanning | stroom | vermogen | efficiëntie^[op basis van 4.5 kW mechanisch vermogen dat berekend is door automotive studenten] |
|
||||
| gearbox | snelheid | koppel | spanning | stroom | vermogen | efficiëntie[^efficentie-berekening] |
|
||||
| ------- | --------:| -------:| --------:| -------:| --------:| ------:|
|
||||
| 1:1 | 1000 rpm | 45.0 Nm | 66.1 V | 303.5 A | 20060 W | 22.4 % |
|
||||
| 1:2 | 2000 rpm | 22.5 Nm | 55.1 V | 153.5 A | 8456 W | 53.2 % |
|
||||
@@ -186,6 +189,8 @@ $$
|
||||
| 1:4 | 4000 rpm | 11.3 Nm | 71.3 V | 78.5 A | 5600 W | 80.4 % |
|
||||
| 1:5 | 5000 rpm | 9.0 Nm | 83.3 V | 63.5 A | 5289 W | 85.1 % |
|
||||
|
||||
[^efficentie-berekening]: op basis van 4.5 kW mechanisch vermogen dat berekend is door automotive studenten
|
||||
|
||||
Met een 1:4 gearbox kan een maximale snelheid van 875 rpm halen (de motor kan maximaal 3500 rpm draaien). Dit is iets onder de eisen, maar een betere motor hebben wij niet gevonden voor een redelijke prijs.
|
||||
|
||||
voor $3500rpm$ met $11.3 Nm$ is een spanning nodig van $64V$.
|
||||
@@ -234,14 +239,14 @@ $$
|
||||
P_{loss} = 50^2 \cdot 0.01 + P_{loss,sw} = 25W + P_{loss,sw}
|
||||
$$
|
||||
|
||||
$P_{loss,sw}$ is voor GaNFET's erg laag, in de simulatie - die gebaseerd is op de voorbeeld simulatie van EPC - schakelt die binnen $4ns$. Als we vanuit gaan van linieer schakelgedrag met liniare oplopende stoom (wat tot veel hogeve verliezen lijd dan de werkelijkheid)
|
||||
$P_{loss,sw}$ is voor GaNFET's erg laag, in de simulatie - die gebaseerd is op de voorbeeld simulatie van EPC - schakelt die binnen $4ns$. Als we vanuit gaan van linieer schakelgedrag met liniare oplopende stroom (wat tot veel hogeve verliezen lijd dan de werkelijkheid)
|
||||
|
||||
$$
|
||||
P_{loss,sw} = \frac{UIt}{2} \cdot 2f_s
|
||||
$$
|
||||
|
||||
$U$: voedings spanning
|
||||
$I$: stoom
|
||||
$I$: stroom
|
||||
$t$: schakeltijd
|
||||
$f_s$: de schakel frequentie
|
||||
|
||||
@@ -350,11 +355,12 @@ Er is gekozen om een spoor breedte van $40mm$ te gebruiken om iets marge te hebb
|
||||
|
||||
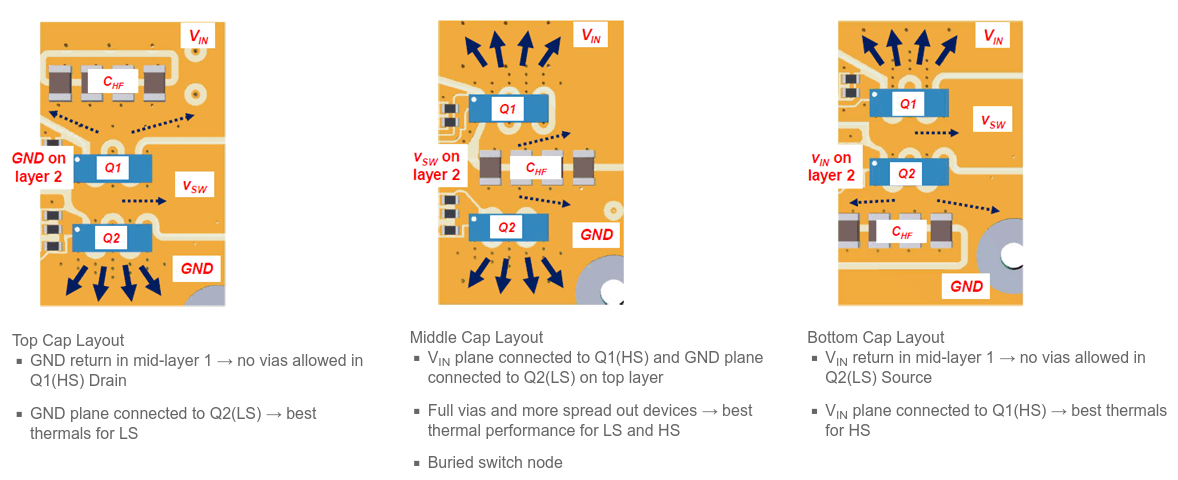
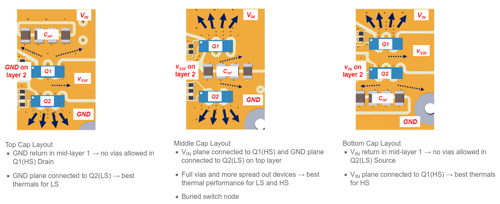
Gelukkig heeft EPC (de fabrikant van de FET's) een aantal aangeraden layouts.
|
||||
|
||||
|
||||
|
||||
|
||||
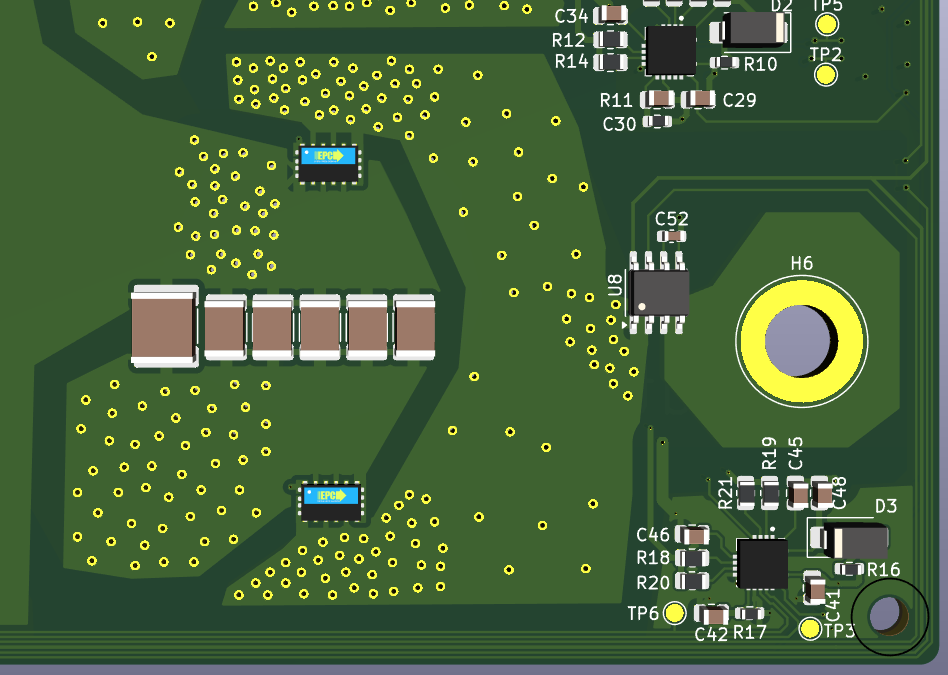
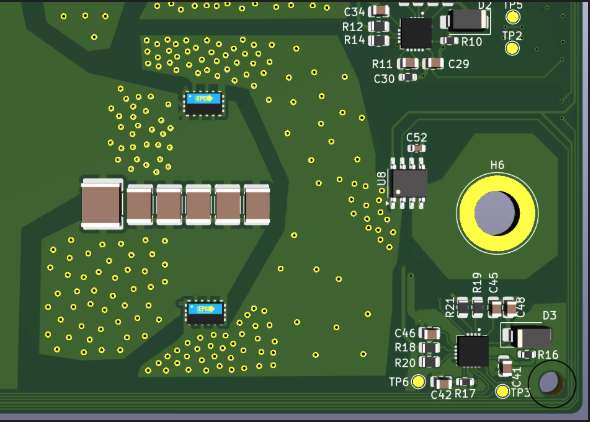
Bij dit project worden de high-side (HS) en low-side (LS) FET's ongeveer hetzelfde belast, dus ze hebben dezelfde koeling nodig. Dus er is voor de middelste optie gekozen.
|
||||
|
||||
|
||||
|
||||
|
||||
|
||||
Hierboven is de layout te zien. De rij condensatoren in het midden tussen de twee FET's (met veel vias er omheen). Rechts daar van de SOIC-8 is de stroom meting IC en rechts onderin de gate driver.
|
||||
|
||||
|
||||
@@ -101,7 +101,7 @@ Er is nog geen uitgebreid testprotocol ontwikkeld om de prestaties van de aandri
|
||||
|
||||
De huidige status van het project vormt de basis voor verdere ontwikkelingen. De volgende stappen zijn gericht op het verder ontwikkelen van het aandrijf- en stuursysteem en de stabilisatie, zodat er een rijdend 2x2x2 voertuig gerealiseerd wordt.
|
||||
|
||||

|
||||

|
||||
|
||||
## Scope & Afbakening
|
||||
|
||||
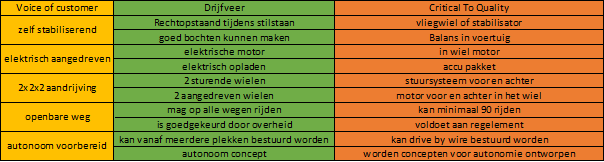
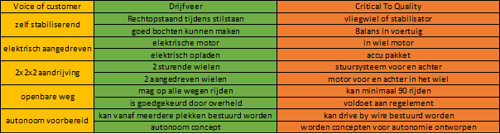
@@ -177,7 +177,8 @@ In die tabel wordt de VOC (voice of customer) genoteerd en bij punten daarvan wo
|
||||
|
||||
De CTQ’s die uit de View of Client en View of Business zijn gehaald die voor dit onderzoek belangrijk zijn, zijn hieronder in tabelvorm genoteerd.
|
||||
|
||||
|
||||
|
||||
|
||||
|
||||
De eisen opgesteld vanuit de opdrachtgever (klant) zijn als volgt:
|
||||
|
||||
@@ -221,15 +222,18 @@ De verificatiefase van het DMADV-model is weliswaar de laatste fase, maar niet h
|
||||
|
||||
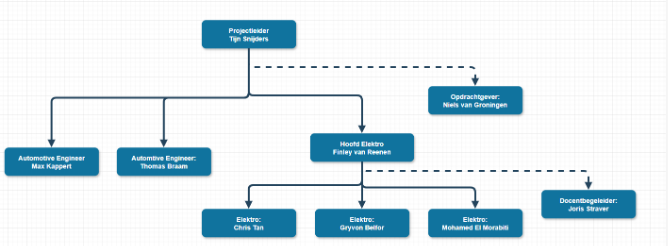
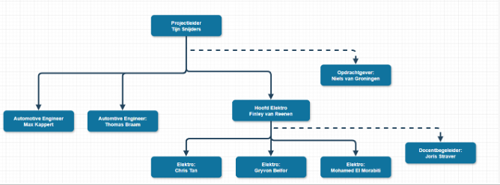
### OBS (Organization Breakdown Structure)
|
||||
|
||||
|
||||
|
||||
|
||||
|
||||
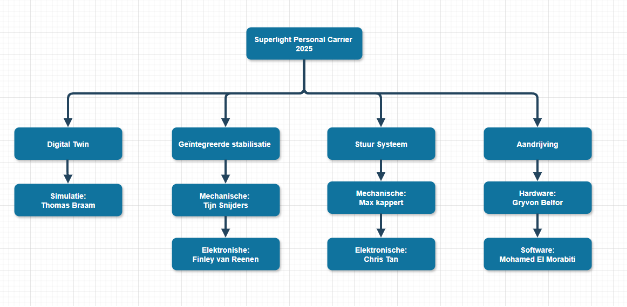
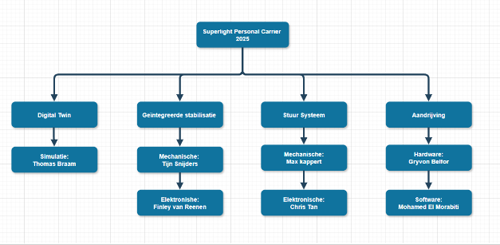
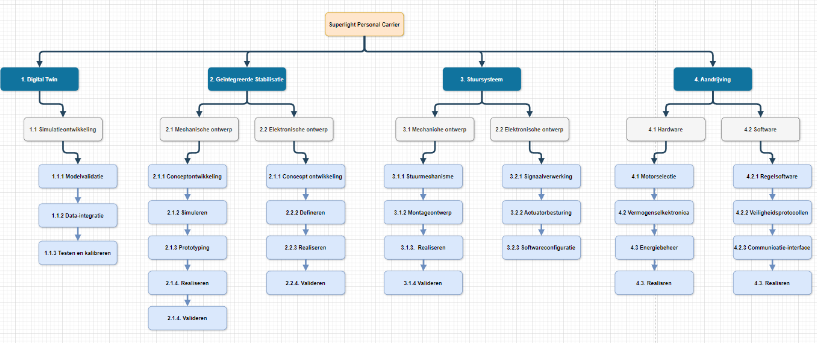
### PBS (Product Breakdown Structure)
|
||||
|
||||
|
||||
|
||||
|
||||
|
||||
### WBS (Work Breakdown Structure)
|
||||
|
||||
|
||||
|
||||
|
||||
|
||||
## Risico- en stakeholder analyse
|
||||
|
||||
@@ -303,7 +307,8 @@ Om het SPC-project succesvol af te ronden, is een goede planning, communicatie e
|
||||
|
||||
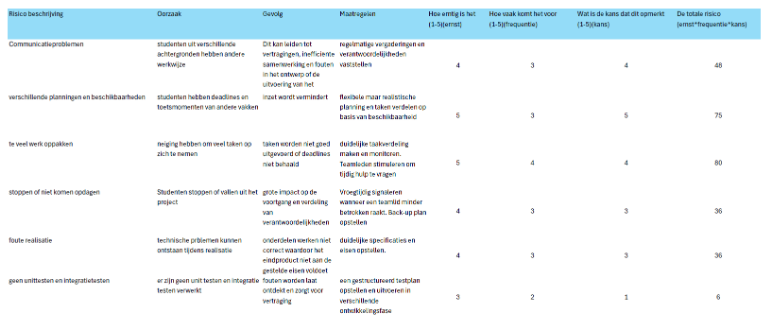
### Risico matrix
|
||||
|
||||
|
||||
|
||||
|
||||
|
||||
### Stakeholder analyse
|
||||
|
||||
@@ -345,7 +350,7 @@ C – Consulted (Geraadpleegd): dit is de persoon aan wie vooraf advies gevraagd
|
||||
|
||||
I – Informed (Geïnformeerd): deze persoon wordt tussentijds geïnformeerd over de beslissingen, over de voortgang, bereikte resultaten enz.
|
||||
|
||||
| | Projectleider Tijn | Max | Thomas | Gryvon | Chris | Projectleider Finley | Mohammed | Van Groningen |
|
||||
| | Tijn | Max | Thomas | Gryvon | Chris | Finley | Mohammed | Van Groningen |
|
||||
| --- | --- | --- | --- | --- | --- | --- | --- | --- |
|
||||
| Projectplanning | R | I | I | I | I | I | I | |
|
||||
| PVE | I | I | I | I | R | A/R | I | C |
|
||||
@@ -390,7 +395,8 @@ In de analyse fase worden de volgende documenten opgesteld:
|
||||
|
||||
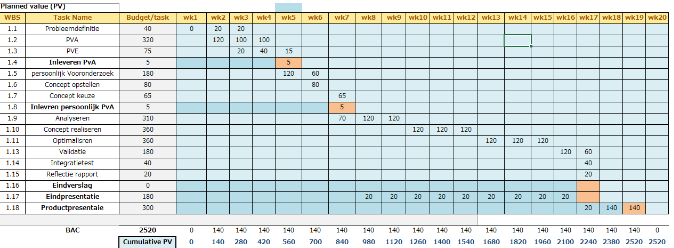
### Value planning
|
||||
|
||||
|
||||
|
||||
|
||||
|
||||
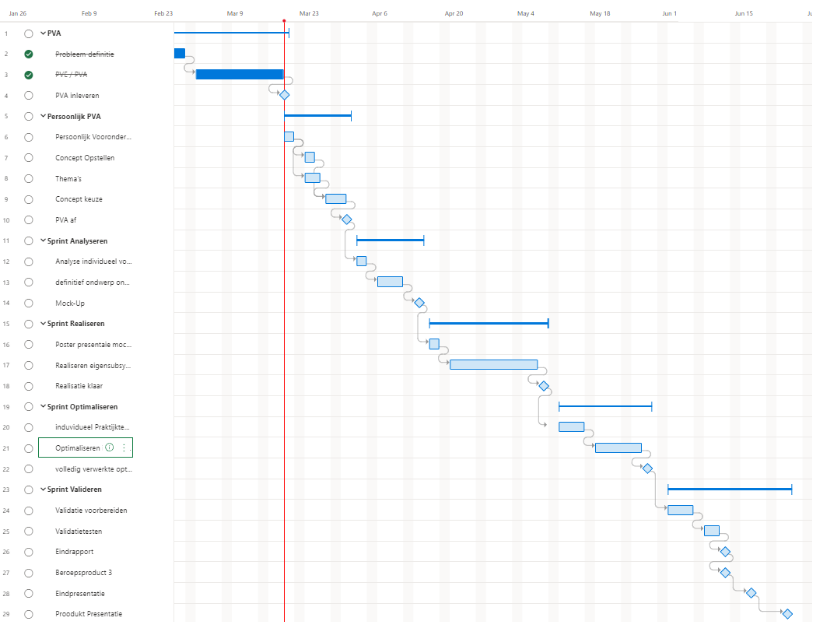
### Dynamische planning
|
||||
|
||||
@@ -398,7 +404,8 @@ Deze planning geeft een overzicht van de verschillende fasen en bijbehorende tak
|
||||
|
||||
De blauwe balken geven de duur van elke taak aan, terwijl de diamantvormige symbolen belangrijke mijlpalen markeren. De rode verticale lijn geeft de huidige voortgang weer. Dit overzicht helpt bij het bewaken van deadlines, het coördineren van werkzaamheden en het tijdig bijsturen van het project waar nodig
|
||||
|
||||
|
||||
|
||||
|
||||
|
||||
## Begroting
|
||||
|
||||
|
||||
@@ -98,20 +98,20 @@ Voor de Stabilisatie is er een motor driver ontworpen. De specificaties van deze
|
||||
|
||||
### De Motor
|
||||
|
||||
Het is een gevonden op Aliexpress, niet een heel erg betrouwbare verkoper, maar we kunnen niks anders geschikts vinden voor een redelijke prijs. Deze motor kan de kracht net niet aan continu, maar wel voor korte duur. De snelheid is wel ietsje ingeperkt ten opzichte van de berekende $1000 rpm$ dat nodig is, deze kan tot $875 rpm$. Dit is de reden geweest dat we geen motor gaan inkopen, maar een motor driver die geschik is om het volledige vermogen te kunnen halen, en testen met een motor uit de voorraad. Deze zal waarschijnlijk niet voldoende vermogen, maar we kunnen wel testen of het concept werkt voor dat er grote bedragen uitgegeven worden aan een wel geschikte motor.
|
||||
Het is er een die gevonden is op Aliexpress, niet een heel erg betrouwbare verkoper, maar we kunnen geeb andere geschikte vinden voor een redelijke prijs. Deze motor kan de kracht net niet continu aan, maar wel voor korte duur. De snelheid is wel iets ingeperkt ten opzichte van de berekende $1000 rpm$ dat nodig is, deze kan maar tot $875 rpm$. Dit is de reden geweest dat we geen motor gaan inkopen, maar een testen met een motor uit de voorraad. Deze zal waarschijnlijk niet voldoende vermogen kunnen halen, maar we kunnen wel testen of het concept werkt voordat er grote bedragen uitgegeven gaan worden aan een geschikte motor.
|
||||
|
||||
De specificaties van de motor:
|
||||
|
||||
- $K_T = 0.15 Nm/A$ - motor koppel constante
|
||||
- $I_{noload} = 3.52 A$ - Stroom verbruik bij geen koppel
|
||||
- $K_v = 69 rpm/V$ - motor snelheidsconstante
|
||||
- $V_{th} = 598 mV$ - thrushold voltage
|
||||
- $V_{th} = 598 mV$ - threshold voltage
|
||||
- $I_{max} = 78.5 A$ - maximaal stroom verbruik voor onze applicatie ($11.2Nm$ met 1:4 gearbox)
|
||||
- $U_{max} = 64 V$ - maximaal spanning benodigd voor onze applicatie
|
||||
|
||||
berekeningen voor deze waardes staat in het Detailontwerp Stabilisatie in hoofdstuk [Motor Keuze](#motor-keuze) (zie bijlagen)
|
||||
berekeningen voor deze waardes staan in het Detailontwerp Stabilisatie in hoofdstuk [Motor Keuze](#motor-keuze) (zie bijlagen)
|
||||
|
||||
> Er is helaas iets fout gegaan bij de berekeningen eerder gedaan om de specificaties vast te stellen. Er is perongeluk met $25 Nm$ gerekent i.p.v. $45 Nm$. Dit betekent dat de motor driver is ontworpen voor $50 A$ i.p.v. $80A$. Dit kan opgelost worden door een motor gearbox combie te vinden die met $50A$ maar een hogere spanning het vermogen haalt. Er is veel ruimte aan spanning, dus dit zal geen groot probleem moeten zijn.
|
||||
> Er is helaas iets fout gegaan bij de berekeningen die eerder gedaan zuhb om de specificaties vast te stellen. Er is per ongeluk met $25 Nm$ gerekent i.p.v. $45 Nm$. Dit betekent dat de motor driver is ontworpen voor $50 A$ i.p.v. $80A$. Dit kan opgelost worden door een motor gearbox combie die te vinden is met $50A$ maar met een hogere spanning het vermogen haalt. Er is veel ruimte aan spanning, dus dit zal geen groot probleem moeten zijn.
|
||||
|
||||
### Motor Driver
|
||||
|
||||
@@ -122,16 +122,16 @@ berekeningen voor deze waardes staat in het Detailontwerp Stabilisatie in hoofds
|
||||
De $120V$ komt van de vorige groep die aan dit project hebben gewerkt. Dit is de spanning van de accu die zij hadden gebruikt om dingen mee te berekenen. Er is nog geen besluit wat deze spanning werkelijk gaat worden.
|
||||
|
||||
- De drijver moet minimaal $50 A$ continu kunnen leveren (wat eigenlijk $80 A$ had moeten zijn) [^1]
|
||||
- Maakt gebruik van Field Orented Controll, om het volledige vermogen te kunnen halen vanaf stilstand.
|
||||
- Maakt gebruik van Field Oriented Control, om het volledige vermogen te kunnen halen vanaf stilstand.
|
||||
- De hoek van het voertuig moet gemeten worden.
|
||||
- Er is een regel loop tussen de hoek sensor en de kracht van de motor.
|
||||
- Er is een SPI-client connector waarmee verschillende instellingen ingesteld mee kan worden, waaronder het maximaal vermogen.
|
||||
|
||||
[^1]: Er wordt tot $50 V$ getest, deze waardes wordt het voor ontworpen, maar niet tot de limiet getest.
|
||||
[^1]: Er wordt tot $50 V$ getest, voor deze waardes wordt het ontworpen, maar niet tot het limiet getest.
|
||||
|
||||
Deze specificaties zijn erg lastig motor driver voor te vinden. Zo lastig dat - zonder een bedrijf een laten ontwerpen - we er geen gevonden hebben. Hierom is gekozen om zelf een motor driver te ontwerpen.
|
||||
Met deze specificaties is het erg lastig om een motor driver voor te vinden. Zo lastig dat - zonder een bedrijf één te laten ontwerpen - we er geen gevonden hebben. Hierom is gekozen om zelf een motor driver te ontwerpen.
|
||||
|
||||
De SPI-client is afgesproken met de andere elektrotechnische ingenieurs als algemeen communicatie protocol na dat is besloten om een eigen motor driver te ontwerpen.
|
||||
De SPI-client is afgesproken met de andere elektrotechnische ingenieurs als algemeen communicatie protocol nadat was besloten om een eigen motor driver te ontwerpen.
|
||||
|
||||
#### Ontwerp
|
||||
|
||||
@@ -151,7 +151,7 @@ $$
|
||||
P_{loss} = I^2R_{DS(on)} + \frac{UIt}{2} \cdot 2f_s
|
||||
$$
|
||||
|
||||
$I$: stoom
|
||||
$I$: stroom
|
||||
$U$: voedingsspanning
|
||||
$t$: schakeltijd
|
||||
$f_s$: de schakel frequentie
|
||||
@@ -168,11 +168,11 @@ Deze formule is erg pessimistisch, deze gaat uit van $100\%$ PWM terwel de uitga
|
||||
|
||||
##### Sensoren
|
||||
|
||||
Er zijn drie sensoren nodig, stoom meting, positie van de motor en de hoek van het voertuig.
|
||||
Er zijn drie sensoren nodig, stroom meting, positie van de motor en de hoek van het voertuig.
|
||||
|
||||
###### stroom meting
|
||||
|
||||
De stroom meting wordt gedaan met de ACS724xLCTR-50AB. Dit is een stroom meet IC die van $-50A$ tot $+50A$ kan meten. Deze komt tussen de motor en de uitgang van de half-bridges. Het is ook mogelijk om aan de lage FET in de half-bridge te meten met een shunt, maar omdat het nog niet heel duidelijk is hoe het FOC algoritme werkt, lijkt dit een makkelijkere manier om het algoritme te implementeren.
|
||||
De stroom meting wordt gedaan met de ACS724xLCTR-50AB. Dit is een stroom meting IC die van $-50A$ tot $+50A$ kan meten. Deze komt tussen de motor en de uitgang van de half-bridges. Het is ook mogelijk om aan de lage FET in de half-bridge te meten met een shunt, maar omdat het nog niet heel duidelijk is hoe het FOC algoritme werkt, lijkt dit een makkelijkere manier om het algoritme te implementeren.
|
||||
|
||||
Er is niet gekozen voor een shunt met een versterker, omdat er $200V$ op deze uitgang komt te staan. De versterkers die dit aankunnen zijn erg duur en de ACS724xLCTR-50AB wordt dan een goedkopere optie.
|
||||
|
||||
@@ -180,7 +180,7 @@ Er is niet gekozen voor een shunt met een versterker, omdat er $200V$ op deze ui
|
||||
|
||||
de motor hoek is nodig voor FOC. Hoe nauwkeuriger deze sensor is hoe efficiënter FOC wordt. De AS5600 is zowel makkelijk te monteren als nauwkeurig zonder dat die elke keer bij het opstarten hoeft gekalibreerd hoeft te worden.
|
||||
|
||||
> Meer informatie warom deze keuze is gemaakt, zie bijlagen Detailontwerp Stabilisatie hooftstuk Encoder
|
||||
> Meer informatie waarom deze keuze is gemaakt, zie de bijlagen Detailontwerp Stabilisatie hooftstuk Encoder
|
||||
|
||||
###### Hoek van het voertuig
|
||||
|
||||
@@ -188,7 +188,7 @@ Een MEMS Gyroscoop kan verandering in de hoek meten, deze is erg snel hierin maa
|
||||
|
||||
Om het makkelijk te maken is er gekozen voor de M5Stack IMU Pro Mini. Deze is makkelijk te monteren, omdat die al in een behuizing zit met montage gaten. Deze sensor komt met de BMI270 van Bosch die zowel een MEMS-acceleratiemeter als gyroscoop heeft.
|
||||
|
||||
> Meer informatie warom deze keuze is gemaakt, zie bijlagen Detailontwerp Stabilisatie hooftstuk [Hoek Sensor](#hoek-sensor)
|
||||
> Meer informatie warom deze keuze is gemaakt, zie bijlagen Detailontwerp Stabilisatie hoofdstuk [Hoek Sensor](#hoek-sensor)
|
||||
|
||||
#### Productie en Testen Motor Driver
|
||||
|
||||
@@ -218,4 +218,6 @@ Vanaf school week 4.1 waren we totaal nog maar met 5 personen i.p.v. 7. Dit heef
|
||||
|
||||

|
||||
|
||||

|
||||
|
||||

|
||||
|
||||
@@ -126,7 +126,7 @@ opmergingen:
|
||||
6. sluit de voeding voor V motor aan
|
||||
7. meet uitgang van de stroom meeting
|
||||
8. zet de v motor voeding uit en verlaats de load naar een andere uitgang
|
||||
9. zet de voeding weer aan en meet de stoom meting
|
||||
9. zet de voeding weer aan en meet de stroom meting
|
||||
10. herhaal dit voor de laaste uitgang
|
||||
|
||||
TODO: add meet table
|
||||
|
||||
Reference in New Issue
Block a user