detailontwerp: add more context for analisys and fix minor issues
All checks were successful
generate pdf files / build (push) Successful in 2m22s
All checks were successful
generate pdf files / build (push) Successful in 2m22s
This commit is contained in:
@@ -10,15 +10,35 @@ tags: kladjes, elektro, elektro/hr, elektro/hr/pee51
|
||||
|
||||
## Inleiding
|
||||
|
||||
De SPC^[Superlight Personal Carrier] is een twee wielig concept eenpersoons voertuig. Zonder actieve stabilisatie gaat deze omvallen, hiervoor is een reactie wiel ontworpen. Het aansturen van de motor voor dit wiel is lastig, de volledige kracht moet gehaald worden vanaf stilstand. Dit is alleen mogelijk met FOC^[Field oriented Controll]. Er zijn niet veel motor driver op de markt voor het vermogen (4,5 KW, 45 Nm), hierom is er een op maat gemaakte motor driver ontworpen.
|
||||
De SPC^[Superlight Personal Carrier] is een twee wielig concept eenpersoons
|
||||
voertuig. Zonder actieve stabilisatie gaat deze omvallen, hiervoor is een
|
||||
reactie wiel ontworpen. Het aansturen van de motor voor dit wiel is lastig, de
|
||||
volledige kracht moet gehaald worden vanaf stilstand. Dit is alleen mogelijk met
|
||||
FOC^[Field oriented Controll].
|
||||
|
||||
## Analyse
|
||||
|
||||
Tijn Stijders (student Automotive engineer) heeft de benodigde kracht van $45 Nm$ op een maximumsnelheid van $1000 rpm$, dit is $4.5 kW$ berekent voor dit voertuig. Deze berekening is gebaseerd op inschattingen van het gewicht van het voertuig, maar is nauwkeurig genoeg om te gebruiken.
|
||||
Er zijn nog veel onbekenden over het voertuig. De belangrijkste parameters die
|
||||
nodig zijn om de stabilisatie te ontwerpen is het totaal gewicht van het
|
||||
voertuig en waar het midden van de massa is. Deze parameters kan je alleen maar
|
||||
weten als het voertuig af is of exact bekent is wat en waar alles in het
|
||||
voertuig komt. Dit weten we nog niet, om deze inschatting te maken hebben de
|
||||
automotive studenten een inschatting gemaakt. Deze inschatting is gemaakt op
|
||||
basis de het huidige frame, hiervoor zijn is het voertuig gewogen en de hoogte
|
||||
van midden punt van de massa gemeten. En inschattingen van wat er
|
||||
nog in het voertuig moet komen.
|
||||
|
||||
Met deze inschattingen is berekent door Tijn zwaar, de benodigde kracht en
|
||||
snelheid om de eisen te halen. Hieruit kwam een reactiewiel van $10 Kg$ en
|
||||
$45 Nm$ op een maximumsnelheid van $1000 rpm$ gehaalt moet kunnen worden.
|
||||
Dit komt neer op $4.5 kW$ meganishce vermogen.
|
||||
|
||||
### Motor Keuze
|
||||
|
||||
Het is voor ons niet toegestaan om boven de $50 V$ te testen op de RDM wegens veiligheid. Er zijn erg weinig motoren beschikbaar die onder deze spanning aan de eisen voldoet. Hierom wordt er niet op volledig vermogen getest in dit project, om meer keuze vrijheid te krijgen voor een geschikte motor.
|
||||
Het is voor ons niet toegestaan om boven de $50 V$ te testen op de RDM wegens
|
||||
veiligheid. Er zijn erg weinig motoren beschikbaar die onder deze spanning aan
|
||||
de eisen voldoet. Hierom wordt het ontwerp voor een hogere spanning ontworpen en
|
||||
niet op volledig vermogen getest.
|
||||
|
||||
De volgende motor is gekozen:
|
||||
|
||||
@@ -77,11 +97,14 @@ De gegeven specificatie zijn:
|
||||
| 23 | 43.33 | 56.41 | 2444 | 2357 | 8.13 | 2006 | 82.1 | 68 |
|
||||
| 24 | 42.99 | 60.35 | 2594 | 2294 | 8.77 | 2108 | 81.3 | 71 |
|
||||
|
||||
Er missen wat gegevens om verder te kunnen. De hoeveelheid stroom bij krachten groter dan $8.77 Nm$ en hoelang de piek kracht volgehouden kan worden.
|
||||
Er missen wat gegevens om verder te kunnen. De hoeveelheid stroom bij krachten
|
||||
groter dan $8.77 Nm$ en hoelang de piek kracht volgehouden kan worden.
|
||||
|
||||
### koppel constante
|
||||
|
||||
Om de stroom bij grotere krachten te berekenen is de koppel constante nodig. Dit is de hoeveelheid koppel die per Ampère levert. In dit geval kan deze berekend worden met de volgende formule.
|
||||
Om de stroom bij grotere krachten te berekenen is de koppel constante nodig.
|
||||
Dit is de hoeveelheid koppel die per Ampère levert. In dit geval kan deze
|
||||
berekend worden met de volgende formule.
|
||||
|
||||
$$
|
||||
K_T = \frac{\tau}{I-I_{noload}}
|
||||
@@ -193,7 +216,7 @@ $$
|
||||
|
||||
Met een 1:4 gearbox kan een maximale snelheid van 875 rpm halen (de motor kan maximaal 3500 rpm draaien). Dit is iets onder de eisen, maar een betere motor hebben wij niet gevonden voor een redelijke prijs.
|
||||
|
||||
voor $3500rpm$ met $11.3 Nm$ is een spanning nodig van $64V$.
|
||||
voor $3500rpm$ met $11.3 Nm$ is een spanning nodig van $71.3V$.
|
||||
|
||||
> Er is zat een grote fout in eerdere berekeningen. Terug regekent was dat voor 25 Nm i.p.v. 45 Nm. Dan is er maar ongeveer 45 A met de 1:4 gearbox nodig. De motor driver is dus ontworpen voor 50 A (inclusief een marge) i.p.v. de 80 A die het eigenlijk had moeten zijn. Volgende keer de berekeningen beter controleren.
|
||||
> Verder in dit document zal de $50 A$ gebruik worden
|
||||
@@ -201,27 +224,66 @@ voor $3500rpm$ met $11.3 Nm$ is een spanning nodig van $64V$.
|
||||
### Specificaties
|
||||
|
||||
- De drijver moet minimaal $72 V$ aan kunnen, met voorkeur van $120 V$ [^1]
|
||||
- de drijver moet minimaal $50 A$ continu kunnen leveren (wat eigenlijk $80 A$ had moeten zijn) [^1]
|
||||
- maakt gebruik van Field Orented Controll, om het volledige vermogen te kunnen halen vanaf stilstand.
|
||||
- de drijver moet minimaal $50 A$ continu kunnen leveren [^1]
|
||||
- maakt gebruik van Field Orented Controll, om het volledige vermogen te kunnen
|
||||
halen vanaf stilstand.
|
||||
- De hoek van het voertuig moet gemeten worden.
|
||||
- Er is een regel loop tussen de hoek sensor en de kracht van de motor.
|
||||
- Er is een SPI-client connector waarmee verschillende instellingen ingesteld mee kan worden, waaronder het maximaal vermogen.
|
||||
- Er is een SPI-client connector waarmee verschillende instellingen ingesteld
|
||||
mee kan worden, waaronder het maximaal vermogen.
|
||||
- Er is een mogenlijkheid om later de SPI-client te kunnen vervangen met een
|
||||
CAN-bus.
|
||||
|
||||
[^1]: Er wordt tot $50 V$ getest, deze waardes word het voor ontworpen, maar niet tot de limiet getest.
|
||||
CAN-bus is de sandaart communicatie potocol in autos, maar er is gekozen om dit
|
||||
protocool nog niet te implementeeren, wegens de complexitijd van dit protocool.
|
||||
|
||||
[^1]: Er wordt tot $50 V$ getest, deze waardes word het voor ontworpen, maar
|
||||
niet tot de limiet getest.
|
||||
|
||||
## Ontwerp
|
||||
|
||||
Motordrivers die dit vermogen aan kunnen en FOC ontersteunen zijn erg schaarst,
|
||||
op de markt. We hebben geen driver kunnen vinden die niet op maat gemaakt wordt.
|
||||
Zelf een maken is goedkoper, aangezien er geen certificeertingen gedaan hoeven
|
||||
worden en geen abrijds kosten hoeven te rekenen voor onszelf.
|
||||
|
||||
Daarbij heeft het team ook al ervaring. Finley heeft al een motor driver
|
||||
ontworpen op haar stage. Dat was ook een grote factor in het maken van deze
|
||||
keuze.
|
||||
|
||||
### Componenten
|
||||
|
||||
#### FET's
|
||||
Een FOC BLDC motor driver bestaat minimaal uit drie half driver en een
|
||||
controller voor de FOC. Eleke halfbridge driver bestaat uit twee transistoren
|
||||
en een gate driver.
|
||||
|
||||
MOSFET's was de eerste waar naar gezocht is. Van bijna alle FET's is de maximale stroom in de datasheet is niet realistisch haalbaar, dit vereist veel koeling dat erg lastig is te realiseren. Dit maakt het vinden van een geschikte MOSFET lastig, de meeste kunnen het niet aan alleen. Het is mogelijk om meerde parallel te zetten, maar dit vereist goede thermisch beheer.
|
||||
#### Transistoren
|
||||
|
||||
Een andere optie is GaNFET's, hier hebben we een fabrikant (Efficiënt Power Converters; EPC) gevonden die veel redelijkere maximale stroom geven. De EPC3207^[[https://epc-co.com/epc/products/gan-fets-and-ics/epc2307](https://epc-co.com/epc/products/gan-fets-and-ics/epc2307)] lijkt met meest geschikt voor dit project. Deze kan $62A$ aan volgens de datasheet, en verliest ongeveer $15W$ bij $50A$. Dit vermogen is goed te koelen met een koelblok.
|
||||
Tyristoren werken niet, omdat de voeding direct van een accu komt dus geen 'zero
|
||||
crossing' om ze uit te zetten. BJT's zijn niet bepaalt geschikt voor grote
|
||||
stromen. De stroom is zelf erg hoog voor FET's, maar dat is eigenlijk onze enige
|
||||
optie.
|
||||
|
||||
MOSFET's was de eerste waar naar gezocht is. Van bijna alle FET's is de maximale
|
||||
stroom in de datasheet is niet realistisch haalbaar, dit vereist veel koeling
|
||||
dat erg lastig is te realiseren. Dit maakt het vinden van een geschikte MOSFET
|
||||
lastig, de meeste kunnen het niet aan alleen. Het is mogelijk om meerde parallel
|
||||
te zetten, maar dit vereist goede thermisch beheer.
|
||||
|
||||
Een andere optie is GaNFET's, hier hebben we een fabrikant (Efficiënt Power
|
||||
Converters; EPC) gevonden die veel redelijkere maximale stroom geven. De
|
||||
EPC3207^[[https://epc-co.com/epc/products/gan-fets-and-ics/epc2307](https://epc-co.com/epc/products/gan-fets-and-ics/epc2307)]
|
||||
lijkt met meest geschikt voor dit project. Deze kan $62A$ aan volgens de
|
||||
datasheet, en verliest ongeveer $15W$ bij $50A$. Dit vermogen is goed te koelen
|
||||
met een koelblok.
|
||||
|
||||
#### Gate Driver
|
||||
|
||||
EPC geeft een lijst aan aangeraden gate drivers IC's^[[https://epc-co.com/epc/design-support/gan-first-time-right/drivers-and-controllers](https://epc-co.com/epc/design-support/gan-first-time-right/drivers-and-controllers)]. Er is gekozen voor de NCP51820 van On-Semi uit deze lijst. Deze kan hoge spanningen aan, de schakeling er om heen is makkelijk te maken door een aparte source en sync pinnen, en is goed verkrijgbaar voor een goede prijs.
|
||||
EPC geeft een lijst aan aangeraden gate drivers
|
||||
IC's^[[https://epc-co.com/epc/design-support/gan-first-time-right/drivers-and-controllers](https://epc-co.com/epc/design-support/gan-first-time-right/drivers-and-controllers)].
|
||||
Er is gekozen voor de NCP51820 van On-Semi uit deze lijst. Deze kan hoge
|
||||
spanningen aan, de schakeling er om heen is makkelijk te maken door een aparte
|
||||
source en sync pinnen, en is goed verkrijgbaar voor een goede prijs.
|
||||
|
||||
##### Verliezen in de FET
|
||||
|
||||
@@ -254,11 +316,13 @@ Als je dit invult:
|
||||
|
||||
$U = 120V$, $I = 50A$, $t = 4 ns$, $f_s = 50 kHz$ dan is $P_{loss,sw} = 1.2 W$.
|
||||
|
||||
Dit geeft een totaal van $P_{loss} = 16.2W$. Dit is berekent met een ruime schakelverlies met bijna $100\%$ PWM. De werkelijkheid zal het minder zijn.
|
||||
Dit geeft een totaal van $P_{loss} = 16.2W$. Dit is berekent met een ruime
|
||||
schakelverlies met bijna $100\%$ PWM. De werkelijkheid zal het minder zijn.
|
||||
|
||||
#### Stroom Meting
|
||||
|
||||
Heel eerlijk, deze was ik een beetje vergeten, dus heb snel de ACS724 toegevoegd. Nu hopen dat die de piek stromen aan kan.
|
||||
Heel eerlijk, deze was ik een beetje vergeten, dus heb snel de ACS724
|
||||
toegevoegd. Nu hopen dat die de piek stromen aan kan.
|
||||
|
||||
#### Hoek Sensor
|
||||
|
||||
@@ -266,39 +330,68 @@ Het meten van de hoek hebben we drie manieren voor gevonden:
|
||||
|
||||
- afstand sensoren naar de grond
|
||||
|
||||
Als de grond wat scheef is zal het reactiewiel het voertuig scheef (ten opzichte van zwaartekracht), waardoor het wiel steeds sneller gaat draaien tot die de maximale snelheid bereikt, dan valt het voertuig om. Niet heel handig dus.
|
||||
Als de grond wat scheef is zal het reactiewiel het voertuig scheef (ten opzichte
|
||||
van zwaartekracht), waardoor het wiel steeds sneller gaat draaien tot die de
|
||||
maximale snelheid bereikt, dan valt het voertuig om. Niet heel handig dus.
|
||||
|
||||
- MEMS-Gyroscoop
|
||||
|
||||
Meet direct de hoek en is snel. Nadeel is als deze afwijkt veranderd de nul positie en gaat die balanceren op het verkeerde punt.
|
||||
Meet direct de hoek en is snel. Nadeel is als deze afwijkt veranderd de nul
|
||||
positie en gaat die balanceren op het verkeerde punt.
|
||||
|
||||
- MEMS-Versnellingsmeter
|
||||
|
||||
Meet de zwaartekracht direct, dus verliest de nul positie niet, maar wordt verstoord bij een stoot.
|
||||
Meet de zwaartekracht direct, dus verliest de nul positie niet, maar wordt
|
||||
verstoord bij een stoot.
|
||||
|
||||
De beste optie is een combinatie van een MEMS-gyroscoop en een MEMS-versnellingsmeter. De versnellingsmeter zorgt er voor dat de nul positie niet verloren gaat. En de gyroscoop voor nauwkeurige meting van de hoek. Deze combinatie wordt ook een IMU (Inertial measurement unit) genoemd.
|
||||
De beste optie is een combinatie van een MEMS-gyroscoop en een
|
||||
MEMS-versnellingsmeter. De versnellingsmeter zorgt er voor dat de nul positie
|
||||
niet verloren gaat. En de gyroscoop voor nauwkeurige meting van de hoek. Deze
|
||||
combinatie wordt ook een IMU (Inertial measurement unit) genoemd.
|
||||
|
||||
Uiteindelijk is de M5Stack IMU Pro Mini gekozen, dit is een module in behuizing met een connector. Dit is erg handig, omdat deze goed schokvrij bevestigt moet worden. Er zit ook nog een kompas en luchtdruk sensor op, maar er zijn geen plannen om deze te gebruiken.
|
||||
Uiteindelijk is de M5Stack IMU Pro Mini gekozen, dit is een module in behuizing
|
||||
met een connector. Dit is erg handig, omdat deze goed schokvrij bevestigt moet
|
||||
worden. Er zit ook nog een kompas en luchtdruk sensor op, maar er zijn geen
|
||||
plannen om deze te gebruiken.
|
||||
|
||||
In deze module zit de BMI270^[[https://www.bosch-sensortec.com/products/motion-sensors/imus/bmi270/](https://www.bosch-sensortec.com/products/motion-sensors/imus/bmi270/)] van Bosch. De I^2^C bus van deze IC is direct verbonden met de connector naar buiten toe.
|
||||
In deze module zit de
|
||||
BMI270^[[https://www.bosch-sensortec.com/products/motion-sensors/imus/bmi270/](https://www.bosch-sensortec.com/products/motion-sensors/imus/bmi270/)]
|
||||
van Bosch. De I^2^C bus van deze IC is direct verbonden met de connector naar
|
||||
buiten toe.
|
||||
|
||||
#### Microcontroller
|
||||
|
||||
Er zijn niet veel vereisten voor de microcontroller, bijna alle microcontrollers hebben SPI, I2C interfaces en een ADC voor de stroom meting. Het belangrijkste is dat die genoeg rekenkracht heeft voor de FOC berekeningen.
|
||||
Er zijn niet veel vereisten voor de microcontroller, bijna alle microcontrollers
|
||||
hebben SPI, I2C interfaces en een ADC voor de stroom meting. Het belangrijkste
|
||||
is dat die genoeg rekenkracht heeft voor de FOC berekeningen.
|
||||
|
||||
Uiteindelijk is gekozen voor een RP2040 van Raspberry Pi, deze heeft twee ARM Cortex M0+ cores die tot 150 MHz aan kunnen. Het grote voordeel van deze microcontroller is dat ik al een ontwerp klaar heb liggen met alle benodigde componenten.
|
||||
Uiteindelijk is gekozen voor een RP2040 van Raspberry Pi, deze heeft twee ARM
|
||||
Cortex M0+ cores die tot 150 MHz aan kunnen. Het grote voordeel van deze
|
||||
microcontroller is dat ik al een ontwerp klaar heb liggen met alle benodigde
|
||||
componenten.
|
||||
|
||||
#### Encoder
|
||||
|
||||
Voor FOC moet de positie van polen (magneten) in de rotor ten opzichte van de slots (elektro magneten) in de rotor. Hoe nauwkeuriger dit is hoe effectiever de FOC is om met maximale vermogen uit de motor te kunnen halen.
|
||||
Voor FOC moet de positie van polen (magneten) in de rotor ten opzichte van de
|
||||
slots (elektro magneten) in de rotor. Hoe nauwkeuriger dit is hoe effectiever
|
||||
de FOC is om met maximale vermogen uit de motor te kunnen halen.
|
||||
|
||||
Veel motoren worden geleverd met drie hall-effect sensoren die deze relatieve positie direct meten, allen zijn deze niet heel nauwkeurig op lage snelheden.
|
||||
Veel motoren worden geleverd met drie hall-effect sensoren die deze relatieve
|
||||
positie direct meten, allen zijn deze niet heel nauwkeurig op lage snelheden.
|
||||
|
||||
Een Relatieve rotary encoder, zoals een optische die sloten telt in een schrijf die gemonteerd is aan de rotor, kan veel nauwkeuriger. Het nadeel is dat deze gekalibreerd moet worden elke keer als de stroom er afgaat.
|
||||
Een Relatieve rotary encoder, zoals een optische die sloten telt in een schrijf
|
||||
die gemonteerd is aan de rotor, kan veel nauwkeuriger. Het nadeel is dat deze
|
||||
gekalibreerd moet worden elke keer als de stroom er afgaat.
|
||||
|
||||
Een absolute rotary encoder hoeft maar 1 keer gekalibreerd te worden. De meeste. Er zijn twee soorten absolute encoders die veel gebruikt worden, een die om een as gemonteerd worden (zoals de AMT212B-V^[[https://www.sameskydevices.com/product/motion-and-control/rotary-encoders/absolute/modular/amt212b-v](https://www.sameskydevices.com/product/motion-and-control/rotary-encoders/absolute/modular/amt212b-v)]) of een die de oriëntatie van een magneet meet (zoals de AS5600^[[https://ams-osram.com/products/sensor-solutions/position-sensors/ams-as5600-position-sensor](https://ams-osram.com/products/sensor-solutions/position-sensors/ams-as5600-position-sensor)]).
|
||||
Een absolute rotary encoder hoeft maar 1 keer gekalibreerd te worden. De meeste.
|
||||
Er zijn twee soorten absolute encoders die veel gebruikt worden, een die om een
|
||||
as gemonteerd worden (zoals de
|
||||
AMT212B-V^[[https://www.sameskydevices.com/product/motion-and-control/rotary-encoders/absolute/modular/amt212b-v](https://www.sameskydevices.com/product/motion-and-control/rotary-encoders/absolute/modular/amt212b-v)])
|
||||
of een die de oriëntatie van een magneet meet (zoals de
|
||||
AS5600^[[https://ams-osram.com/products/sensor-solutions/position-sensors/ams-as5600-position-sensor](https://ams-osram.com/products/sensor-solutions/position-sensors/ams-as5600-position-sensor)]).
|
||||
|
||||
Er is gekozen voor een breakout board te kopen van de AS5600, deze is het makkelijkst de monteren en goed verkrijgbaar van de absolute encoders.
|
||||
Er is gekozen voor een breakout board te kopen van de AS5600, deze is het
|
||||
makkelijkst de monteren en goed verkrijgbaar van de absolute encoders.
|
||||
|
||||
### Schema
|
||||
|
||||
@@ -306,35 +399,65 @@ Het schema is gemaakt in KiCad
|
||||
|
||||
#### Half-bridge
|
||||
|
||||
Voor een BLDC-motor driver zijn drie half-bridges nodig. Bij een ontwerp van een half bridge zijn twee belangrijke dingen, naast component keuze. De gate driver en de power filtering.
|
||||
Voor een BLDC-motor driver zijn drie half-bridges nodig. Bij een ontwerp van een
|
||||
half bridge zijn twee belangrijke dingen, naast component keuze. De gate driver
|
||||
en de power filtering.
|
||||
|
||||
##### Power Filtering
|
||||
|
||||
In dit ontwerp worden GaNFET's gebruikt, deze schadelijk binnen enkele nanosecondes. Eleke hoeveelheid aan inductie vanaf de voeding vertraagt deze snelheid, en is een antenne voor de honderden MHz dat door deze schakelsnelheid gegenereerd wordt. Er moeten dus condensatoren zo dicht mogelijk bij de FET's om de inductie zo minimaal mogelijk te maken. Deze moeten ook keramische zijn door de lage ESR. Een nadeel is dat deze voor veel motor drijvers eigenlijk te groot zijn waardoor de afstand tussen de condensator en FET's te groot wordt als de filtering in 1 stage gaat.
|
||||
In dit ontwerp worden GaNFET's gebruikt, deze schadelijk binnen enkele
|
||||
nanosecondes. Eleke hoeveelheid aan inductie vanaf de voeding vertraagt deze
|
||||
snelheid, en is een antenne voor de honderden MHz dat door deze schakelsnelheid
|
||||
gegenereerd wordt. Er moeten dus condensatoren zo dicht mogelijk bij de FET's om
|
||||
de inductie zo minimaal mogelijk te maken. Deze moeten ook keramische zijn door
|
||||
de lage ESR. Een nadeel is dat deze voor veel motor drijvers eigenlijk te groot
|
||||
zijn waardoor de afstand tussen de condensator en FET's te groot wordt als de
|
||||
filtering in 1 stage gaat.
|
||||
|
||||
Om te berekenen hoeveel stages nodig zijn, moet eerste de layout gemaakt worden (hier meer over in het hooftstuk PCB). Bij de layout is het geluk om $7.2 \mu F$ (5 x $1\mu F$ en 1 x $2.2\mu F$) in de eerste stage te plaatsen.
|
||||
Om te berekenen hoeveel stages nodig zijn, moet eerste de layout gemaakt worden
|
||||
(hier meer over in het hooftstuk PCB). Bij de layout is het geluk om $7.2 \mu F$
|
||||
(5 x $1\mu F$ en 1 x $2.2\mu F$) in de eerste stage te plaatsen.
|
||||
|
||||
> TODO: ref to hooftstuk pcb needed!
|
||||
|
||||
Na veel experimenteren in een simulatie in LTspice lijkt $7.2\mu F$ wel weinig, het zal een stuk beter zijn als er $20\mu F$ zal passen.
|
||||
Na veel experimenteren in een simulatie in LTspice lijkt $7.2\mu F$ wel weinig,
|
||||
het zal een stuk beter zijn als er $20\mu F$ zal passen.
|
||||
|
||||
De tweede stage is wat klein gehouden, om in inschakelstroom beperkt te houden. Dit betekent wel dat er erg dikke kabels nodig zijn om het volledige vermogen aan te kunnen.
|
||||
De tweede stage is wat klein gehouden, om in inschakelstroom beperkt te houden.
|
||||
Dit betekent wel dat er erg dikke kabels nodig zijn om het volledige vermogen
|
||||
aan te kunnen.
|
||||
|
||||
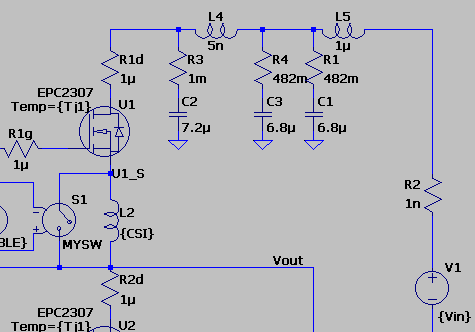
Helaas is de simulatie gecrasht en het bestand corrupt geraakt. Het is hierna niet meer gelukt om de simulatie stabiel opnieuw op te bouwen (vermogens van honderden KW bij een kleine aanpassing). Onder staat is de schakeling van de opnieuw opgebouwde schakeling die dus niet werkt.
|
||||
Helaas is de simulatie gecrasht en het bestand corrupt geraakt. Het is hierna
|
||||
niet meer gelukt om de simulatie stabiel opnieuw op te bouwen (vermogens van
|
||||
honderden KW bij een kleine aanpassing). Onder staat is de schakeling van de
|
||||
opnieuw opgebouwde schakeling die dus niet werkt.
|
||||
|
||||
|
||||
|
||||
C2 zijn de keramische condensatoren vlak bij de FET's (eerste stage), C3 en C1 zijn solid polymer aluminum capacitors voor de tweede stage. L4 is een ingeschatte inductie van de verbinding tussen de condensatoren en L5 is de inductie van de kabels vanaf de accu.
|
||||
C2 zijn de keramische condensatoren vlak bij de FET's (eerste stage), C3 en C1
|
||||
zijn solid polymer aluminum capacitors voor de tweede stage. L4 is een
|
||||
ingeschatte inductie van de verbinding tussen de condensatoren en L5 is de
|
||||
inductie van de kabels vanaf de accu.
|
||||
|
||||
De condensator waardes zijn een stuk groter dan op het evaluatiebord. Hier zitten 7 condensatoren van $22nF$ op ($125nF$ totaal). Ik vermoed dat mijn simulaties wat pessimistischer zijn dat de werkelijkheid.
|
||||
De condensator waardes zijn een stuk groter dan op het evaluatiebord. Hier
|
||||
zitten 7 condensatoren van $22nF$ op ($125nF$ totaal). Ik vermoed dat mijn
|
||||
simulaties wat pessimistischer zijn dat de werkelijkheid.
|
||||
|
||||
##### Gate Driver
|
||||
|
||||
Het simulatiemodel van de gate driver IC is alleen beschikbaar voor Simplus. Het is mij niet gelukt om de gratis versie van deze software werkend te krijgen of het model te converteren naar een ander format. Dus het berekenen of simuleren voor gate driver gaat niet lukken. Dus ik heb een referentieontwerp van EPC overgenomen met een $0\Omega$ weerstand bij de sync (hier is wel een $0\Omega$ jumper gebruikt zodat die later vervangen kan worden met een weerstand) en $0.39\Omega$ voor de source.
|
||||
Het simulatiemodel van de gate driver IC is alleen beschikbaar voor Simplus. Het
|
||||
is mij niet gelukt om de gratis versie van deze software werkend te krijgen of
|
||||
het model te converteren naar een ander format. Dus het berekenen of simuleren
|
||||
voor gate driver gaat niet lukken. Dus ik heb een referentieontwerp van EPC
|
||||
overgenomen met een $0\Omega$ weerstand bij de sync (hier is wel een $0\Omega$
|
||||
jumper gebruikt zodat die later vervangen kan worden met een weerstand) en
|
||||
$0.39\Omega$ voor de source.
|
||||
|
||||
#### Microcontroller
|
||||
|
||||
De microcontroller schakeling is een kopie van een hobby project, deze schakeling is al getest. Er is niks veranderd aan dit ontwerp voor dit project, behalve dat er andere io pinnen gebruikt worden.
|
||||
De microcontroller schakeling is een kopie van een hobby project, deze
|
||||
schakeling is al getest. Er is niks veranderd aan dit ontwerp voor dit project,
|
||||
behalve dat er andere io pinnen gebruikt worden.
|
||||
|
||||
### PCB
|
||||
|
||||
@@ -343,13 +466,24 @@ De microcontroller schakeling is een kopie van een hobby project, deze schakelin
|
||||
Vijftig ampère is erg veel voor een PCB.
|
||||
|
||||
> KiCad Calculator Tools:
|
||||
> "The calculations are valid for currents up to $35 A$ (external) or $17.5 A$ (internal), temperature rises up to $100^\circ C$, and widths of up to 400 mils (10mm)"
|
||||
> "The calculations are valid for currents up to $35 A$ (external) or $17.5 A$
|
||||
(internal), temperature rises up to $100^\circ C$, and widths of up to 400
|
||||
mils (10mm)"
|
||||
|
||||
Deze tool heeft voor $35A$, $150mm$ spoor lengte en $10^\circ C\Delta$ met $70\mu m$ koper een spoor breedte van $20.2mm$. De spoorbreedte is al buiten het berijk van deze tool. Als we toch de stroom verandert naar $50A$ wordt dit $33.1mm$.
|
||||
Deze tool heeft voor $35A$, $150mm$ spoor lengte en $10^\circ C\Delta$ met
|
||||
$70\mu m$ koper een spoor breedte van $20.2mm$. De spoorbreedte is al buiten het
|
||||
berijk van deze tool. Als we toch de stroom verandert naar $50A$ wordt dit
|
||||
$33.1mm$.
|
||||
|
||||
Met dezelfde instellingen voor $50A$ in de calculator van DigiKey keeft die dezelfde resultatie. En die van AdvancedPCB, PCBWay en OMNI calculator. Of ze gebruiken allemaal dezelfde beperkte formule of het klopt redelijk.
|
||||
Met dezelfde instellingen voor $50A$ in de calculator van DigiKey keeft die
|
||||
dezelfde resultatie. En die van AdvancedPCB, PCBWay en OMNI calculator. Of ze
|
||||
gebruiken allemaal dezelfde beperkte formule of het klopt redelijk.
|
||||
|
||||
Er is gekozen om een spoor breedte van $40mm$ te gebruiken om iets marge te hebben als deze rekenmachines afwijken. Dit is erg breed, dus dit verdeeld gedaan over een buiten laag en een binnen laag plus nog een extra marge omdat binnenlagen minder goed koelen. De lagen zijn om en om gedaan, zodat het beetje capaciteit tussen deze lagen de inductie ietsje compenseert.
|
||||
Er is gekozen om een spoor breedte van $40mm$ te gebruiken om iets marge te
|
||||
hebben als deze rekenmachines afwijken. Dit is erg breed, dus dit verdeeld gedaan
|
||||
over een buiten laag en een binnen laag plus nog een extra marge omdat
|
||||
binnenlagen minder goed koelen. De lagen zijn om en om gedaan, zodat het beetje
|
||||
capaciteit tussen deze lagen de inductie ietsje compenseert.
|
||||
|
||||
#### Half-bridges
|
||||
|
||||
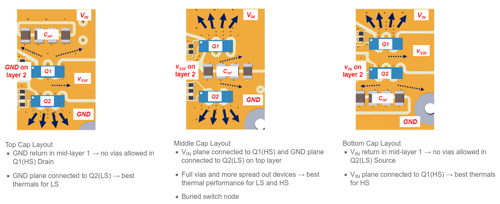
@@ -357,17 +491,28 @@ Gelukkig heeft EPC (de fabrikant van de FET's) een aantal aangeraden layouts.
|
||||
|
||||
|
||||
|
||||
Bij dit project worden de high-side (HS) en low-side (LS) FET's ongeveer hetzelfde belast, dus ze hebben dezelfde koeling nodig. Dus er is voor de middelste optie gekozen.
|
||||
Bij dit project worden de high-side (HS) en low-side (LS) FET's ongeveer
|
||||
hetzelfde belast, dus ze hebben dezelfde koeling nodig. Dus er is voor de
|
||||
middelste optie gekozen.
|
||||
|
||||
|
||||
|
||||
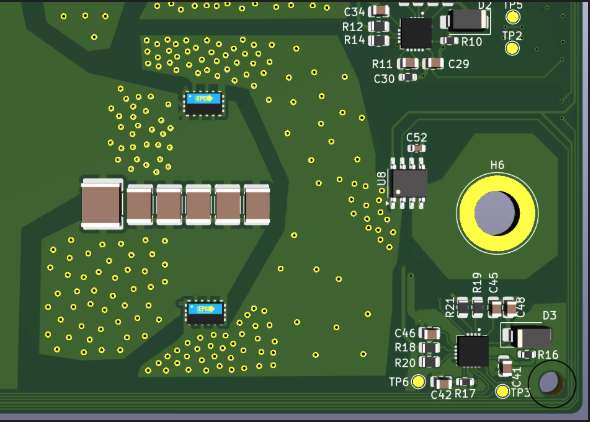
Hierboven is de layout te zien. De rij condensatoren in het midden tussen de
|
||||
twee FET's (met veel vias er omheen). Rechts daar van de SOIC-8 is de stroom
|
||||
meting IC en rechts onderin de gate driver.
|
||||
|
||||
Hierboven is de layout te zien. De rij condensatoren in het midden tussen de twee FET's (met veel vias er omheen). Rechts daar van de SOIC-8 is de stroom meting IC en rechts onderin de gate driver.
|
||||
|
||||
De uitgang van de FET's voor de stroom meet IC is er ook in de binnen laag direct onder de top laat (de render is van de top laag). Deze zit er om de stroom loop zo'n klein mogelijk oppervlak te geven met de condensatoren, door er onder door te gaan. Hierom stoppen de vias van de voeding ook zo abrupt.
|
||||
De uitgang van de FET's voor de stroom meet IC is er ook in de binnen laag
|
||||
direct onder de top laat (de render is van de top laag). Deze zit er om de
|
||||
stroom loop zo'n klein mogelijk oppervlak te geven met de condensatoren, door er
|
||||
onder door te gaan. Hierom stoppen de vias van de voeding ook zo abrupt.
|
||||
|
||||
## Productie
|
||||
|
||||
De PCB en stencel zijn gepoduceert door JLCPCB en de componenten zijn gelaats en in de reflow oven gegaan in het SMD-lab op Accademiplein.
|
||||
De PCB en stencel zijn gepoduceert door JLCPCB en de componenten zijn gelaats en
|
||||
in de reflow oven gegaan in het SMD-lab op Accademiplein.
|
||||
|
||||
Na dat die uit de over kwam zijn er een aantal soleer balletjes weggehaald, twee soldeer bruggen weg gehaald bij een van de gate driver IC's en de microcontroller opnieuwe met de hand erop gelaast. De microcontroller had teveel tin op de groundpad aan de onderkant, waardoor deze omhoog kwam en de pinnen aan de zijkant boven de PCB zweefde onder contact.
|
||||
Na dat die uit de over kwam zijn er een aantal soleer balletjes weggehaald, twee
|
||||
soldeer bruggen weg gehaald bij een van de gate driver IC's en de
|
||||
microcontroller opnieuwe met de hand erop gelaast. De microcontroller had teveel
|
||||
tin op de groundpad aan de onderkant, waardoor deze omhoog kwam en de pinnen aan
|
||||
de zijkant boven de PCB zweefde onder contact.
|
||||
|
||||
@@ -96,6 +96,13 @@ Voor de Actuator is er een keuze gemaakt voor CDC (Continuous Damping Control) d
|
||||
|
||||
Voor de Stabilisatie is er een motor driver ontworpen. De specificaties van deze zijn groten deels gebaseerd op specifieke motor. Samen met Automotive is deze uitgekozen.
|
||||
|
||||
> [!TODO] toevoegen
|
||||
> Automotive dee lang over het gerekenen van kracht en vermogen voor de
|
||||
> stabilisatie. Finley heeft hier regelmatig naar gepushed en heeft zelf ook
|
||||
> het huidige frame gewogen om het wat sneller te laten gaan. en heeft tussendoor
|
||||
> ook rond gekeken naar motoren en drivers, onderzoek naar FOC gedaan in de hoop
|
||||
> dat ik dat kan gebruiken. Helaas was alles max $10%$ van wat nodig is.
|
||||
|
||||
### De Motor
|
||||
|
||||
Het is er een die gevonden is op Aliexpress, niet een heel erg betrouwbare verkoper, maar we kunnen geeb andere geschikte vinden voor een redelijke prijs. Deze motor kan de kracht net niet continu aan, maar wel voor korte duur. De snelheid is wel iets ingeperkt ten opzichte van de berekende $1000 rpm$ dat nodig is, deze kan maar tot $875 rpm$. Dit is de reden geweest dat we geen motor gaan inkopen, maar een testen met een motor uit de voorraad. Deze zal waarschijnlijk niet voldoende vermogen kunnen halen, maar we kunnen wel testen of het concept werkt voordat er grote bedragen uitgegeven gaan worden aan een geschikte motor.
|
||||
|
||||
Reference in New Issue
Block a user