This commit is contained in:
@@ -1,3 +1,8 @@
|
||||
---
|
||||
tags: kladjes, elektro, elektro/hr, elektro/hr/pee51
|
||||
---
|
||||
|
||||
[parent](/tPb3Up1fQEuZ86yrJSkYRQ)
|
||||
|
||||
# Detailontwerp Stabilisatie
|
||||
|
||||
@@ -142,8 +147,14 @@ Als $\omega = 0$ gelt $U = \frac{\tau}{K_T} R + U_{th}$ en $I = \frac{\tau}{K_T}
|
||||
Hiermee kan de volgende formule opgesteld worden
|
||||
|
||||
$$
|
||||
U=\frac{\omega}{K_v} + \frac{\tau}{K_T} R + R I_{noload} \\
|
||||
\Rightarrow RU=R\frac{\omega}{K_v} + R^2(\frac{\tau}{K_T} + I_{noload}) \\
|
||||
U = \frac{\omega}{K_v} + \frac{\tau}{K_T} R + R I_{noload}
|
||||
$$
|
||||
|
||||
$$
|
||||
\Rightarrow RU=R\frac{\omega}{K_v} + R^2(\frac{\tau}{K_T} + I_{noload})
|
||||
$$
|
||||
|
||||
$$
|
||||
\Rightarrow \sqrt{\frac{U}{\frac{\omega}{K_v} (\frac{\tau}{K_T} + I_{noload})}} = R
|
||||
$$
|
||||
|
||||
|
||||
@@ -1,13 +1,30 @@
|
||||
---
|
||||
tags: kladjes, elektro, elektro/hr, elektro/hr/pee51
|
||||
---
|
||||
|
||||
### Vehicle Control Unit
|
||||
[parent](/tPb3Up1fQEuZ86yrJSkYRQ)
|
||||
|
||||
De VCU is het belangrijkste onderdeel van het systeem, hiermee kunnen we het voertuig sturen, de belangrijkste keuze hierin is in welke taal we willen gaan programmeren. De reden hiervoor is zodat de volgende team makkelijker kan omgaan met de code. het makkelijkst is dan om met de Arduino IDE verder te gaan omdat het een bekent en veel gedocumenteerd systeem is. verder moet het ook draadloos verbinding kunnen maken met een controller zodat de volgende teams eventueel een andere keuze kunnen maken hoe ze willen sturen.
|
||||
|
||||
### Actuator
|
||||
## Vehicle Control unit
|
||||
|
||||
De VCU is een belangrijk onderdeel van het systeem, hiermee kunnen we het voertuig in een richting sturen en vooruit bewegen, de belangrijkste keuzes hierin zijn in welke taal we willen gaan programmeren en wat voor soort microcontroller we willen. De reden hiervoor is zodat de volgende team makkelijker kan omgaan met de code en het systeem makkelijker kunnen uitbreiden. het makkelijkst is dan om met de Arduino IDE en taal verder te gaan, omdat het een bekent en veel gedocumenteerd systeem is waar je veel over kan vinden op internet tegenover veel andere IDE's, programmeer talen en microcontrollers. verder moet het ook draadloos verbinding kunnen maken met een console controller zodat de volgende teams eventueel een andere keuze kunnen maken hoe ze willen sturen. Daarom hebben we voor de ESP32 gekozen omdat het alles aantikt met een gezond aantal GPIO pinnen.
|
||||
|
||||
## Actuator
|
||||
|
||||
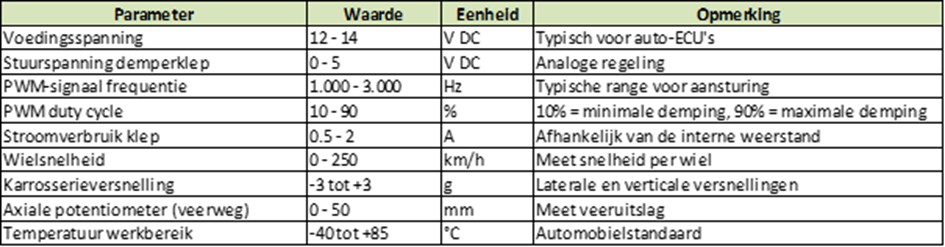
De actuator hebben we nodig om de wielen in een richting te kunnen sturen volgens Max Kappert(student automotive engineer) hebben we de volgende parameters gekregen die we nodig hebben om het voertuig te kunnen sturen.
|
||||
|
||||
|
||||
| Parameter | Waarde | Eenheid | Opmerking |
|
||||
|--------------------------------|-------------|------------|----------------------|
|
||||
| Voertuigspanning | 12-14 | $V_DC$ | typisch voor auto-ECU's |
|
||||
| Stuurspanningdemperkle | 0-5 | $V_DC$ | naloge regeling |
|
||||
| PWM-signaal frequentie | 1000-3000 | $Hz$ | Typische range voor aansturing |
|
||||
| PWM duty cycle | 10-90 | $%$ | $0%$: minimale demping, $90%$: maximale demping |
|
||||
| Stroomverbruik klep | 0.5 - 2 | $A$ | Afhankelijk van de interne weerstand |
|
||||
| Wielsnelheid | 0-250 | $km/h$ | Meet snelheid per wiel |
|
||||
| Karrosserieversnelling | -3 tot +3 | $g$ | Laterale en verticale versnellingen |
|
||||
| Axiale potentiometer (veerweg) | 0- 50 | $mm$ | Meet veeruitslag |
|
||||
| Temperatuur werkbereik | -40 tot +85 | $^\circ C$ | Automobielstandaard |
|
||||
|
||||
Voor de Actuator is er een keuze gemaakt voor CDC (Continuous Damping Control) demper van SACHS, Maar vanwege de besteltijden van dit soort componenten kunnen we dit niet gebruiken. Daarom gebruiken we een actuator die er al staat, de A0-01/M van S-LINE. om de actuator te besturen gebruiken we een motordriver, de MDD20A. Dit is omdat we het al hebben en werkt met de huidige actuatoren en voldoende de parameters van de actuatoren behaald, daarom hebben we besloten om niet een nieuwe te kopen of te ontwerpen. Om ervoor te zorgen dat de actuatoren niet te ver gaan gebruiken we de AS5600 magnetic encoder. Dit is omdat de encoder een absoluut positie meegeeft en daarom voor minder problemen zorgt als het voertuig opnieuw opstart.
|
||||
|
||||
Voor de Actuator is er een keuze gemaakt voor CDC (Continuous Damping Control) demper van SACHS, Maar vanwege de besteltijden van dit soort componenten kunnen we dit niet gebruiken. Daarom gebruiken we een actuator die er al staat, de A0-01/M van S-LINE.
|
||||
|
||||
|
||||
@@ -17,18 +17,19 @@ Deze onderdelen zijn gesplitst op basis van welke onderdelen die in dit project
|
||||
## Eis identificatie code
|
||||
|
||||
```
|
||||
REQ-X-X-X
|
||||
| | +- uniek identificatie nummer
|
||||
REQ-X-X[XX]
|
||||
| | |
|
||||
| | +- MH: zonder is het product niet bruikbaar
|
||||
| | SH: het product is zonder ook bruikbaar, maar is zeer gewenst
|
||||
| | CH: als het binnen de tijd lukt is het gewenst
|
||||
| | WH: niet gewenst
|
||||
| |
|
||||
| +--- A: algemeen
|
||||
| W: wiel assembly
|
||||
| S: stabilisatie
|
||||
| C: VCU
|
||||
| +--- uniek identificatie nummer
|
||||
|
|
||||
+----- M: zonder is het product niet bruikbaar
|
||||
S: het product is zonder ook bruikbaar, maar is zeer gewenst
|
||||
C: als het binnen de tijd lukt is het gewenst
|
||||
W: niet gewenst
|
||||
+----- A: algemeen
|
||||
W: wiel assembly
|
||||
S: stabilisatie
|
||||
C: VCU
|
||||
```
|
||||
|
||||
## Definities
|
||||
@@ -38,62 +39,75 @@ REQ-X-X-X
|
||||
|
||||
## Algemene eisen
|
||||
|
||||
**REQ-M-A-1: Het voertuig exclusief bestuurder weegt 250 kilogram of minder.**
|
||||
**REQ-M-A-2: Het voertuig heeft een totale lengte van 4 meter of minder.**
|
||||
**REQ-M-A-3: Het voertuig heeft een totale breedte van 60 centimeter of minder.**
|
||||
**REQ-A-1[MH]: Het voertuig exclusief bestuurder weegt 250 kilogram of minder.**
|
||||
|
||||
**REQ-A-2[MH]: Het voertuig heeft een totale lengte van 4 meter of minder.**
|
||||
|
||||
**REQ-A-3[MH]: Het voertuig heeft een totale breedte van 60 centimeter of minder.**
|
||||
|
||||
> niet ietsje breeder?
|
||||
|
||||
**REQ-M-A-4: Het voertuig is ontworpen[^ontwerp] zodat die 60 kilometer per uur of sneller kan rijden.**
|
||||
**REQ-A-4[MH]: Het voertuig is ontworpen[^ontwerp] zodat de maximale snelheid 60 kilometer per uur of sneller is.**
|
||||
|
||||
> in welke omstandigheden.
|
||||
> in welke omstandigheden.
|
||||
|
||||
De 60 km/h is de minimale snelheid voor op de snelweg^[[https://www.rijksoverheid.nl/onderwerpen/wegen/vraag-en-antwoord/wat-is-de-minimumsnelheid-voor-het-wegverkeer](https://www.rijksoverheid.nl/onderwerpen/wegen/vraag-en-antwoord/wat-is-de-minimumsnelheid-voor-het-wegverkeer)].
|
||||
60 km/h is de minimale snelheid voor op de snelweg^[[https://www.rijksoverheid.nl/onderwerpen/wegen/vraag-en-antwoord/wat-is-de-minimumsnelheid-voor-het-wegverkeer](https://www.rijksoverheid.nl/onderwerpen/wegen/vraag-en-antwoord/wat-is-de-minimumsnelheid-voor-het-wegverkeer)].
|
||||
|
||||
**REQ-S-A-4: Het voertuig is ontworpen[^ontwerp] zodat die 150 kilometer per uur of sneller kan rijden in ideale omstandigheden[^omstandig].**
|
||||
**REQ-M-A-5: Het voertuig is ontworpen[^ontwerp] zodat die 100 kilometer actieradius of meer kan bereiken in ideale omstandigheden[^omstandig].**
|
||||
**REQ-A-5[SH]: Het voertuig is ontworpen[^ontwerp] zodat die 150 kilometer per uur of sneller kan rijden in ideale omstandigheden[^omstandig].**
|
||||
|
||||
**REQ-A-6[SH]: Het voertuig is ontworpen[^ontwerp] zodat die 100 kilometer actieradius of meer kan bereiken in ideale omstandigheden[^omstandig].**
|
||||
|
||||
De opdracht gever wil graag tussen Amsterdam van Rotterdam kunnen rijden.
|
||||
|
||||
**REQ-C-A-5: Het voertuig is ontworpen[^ontwerp] zodat die 250 kilometer actieradius of meer kan bereiken in ideale omstandigheden[^omstandig].**
|
||||
**REQ-A-7[CH]: Het voertuig is ontworpen[^ontwerp] zodat die 250 kilometer actieradius of meer kan bereiken in ideale omstandigheden[^omstandig].**
|
||||
|
||||
[^ontwerp]: Binnen de tijdspan van dit project is het niet mogelijk om op deze eisen te testen buiten een simulatie of rekenmodel.
|
||||
|
||||
[^omstandig]: De ideale omstandigheden is op een vlakke rechte geasfalteerde weg zonder wind, regen, hagel, sneeuw of andere weersomstandigheden die een negatief gevolg op de test kunnen hebben.
|
||||
|
||||
**REQ-C-A-6: Het voertuig is bestand tegen corrosie**
|
||||
**REQ-A-8[CH]: Het voertuig is bestand tegen corrosie**
|
||||
|
||||
**REQ-C-A-7: Het voertuig kan bedient worden door een bestuureder van 130 kilogram of minder.**
|
||||
**REQ-A-9[SH]: Het voertuig kan bedient worden door een bestuureder van 130 kilogram of minder.**
|
||||
|
||||
**REQ-M-A-8: Het voertuig kan bediend worden door een bestuurder met een lengte van 150 centimeter tot en met 200 centimeter.**
|
||||
**REQ-A-10[SH]: Het voertuig kan bediend worden door een bestuurder met een lengte van 150 centimeter tot en met 200 centimeter.**
|
||||
|
||||
> bron https://www.cbs.nl/nl-nl/maatwerk/2021/37/lichaamslengte
|
||||
> 8% van 19 jarige vrouwen zijn korter dan 160
|
||||
> 10.2% van 19 jarige mannen zijn korter dan 175
|
||||
|
||||
**REQ-M-A-9: De bestuurder van het voertuig zit volledig binnen de afmetingen van het voertuig, met uitzondering van de hoogte.**
|
||||
**REQ-S-A-10: Het zwaarte punt van het voertuig ligt 45 centimeter of minder boven de grond bij een vlakke grond.**
|
||||
**REQ-A-11[MH]: De bestuurder van het voertuig zit volledig binnen de afmetingen van het voertuig, met uitzondering van de hoogte.**
|
||||
|
||||
**REQ-A-12[SH]: Het zwaarte punt van het voertuig ligt 45 centimeter of minder boven de grond bij een vlakke grond.**
|
||||
|
||||
## Wiel Assembly
|
||||
|
||||
**REQ-M-W-1: het voertuig heeft twee wielen.**
|
||||
**REQ-M-W-2: het voertuig wordt aangedreven door beide wielen.**
|
||||
**REQ-S-W-3: het voertuig stuurt met beide wielen.**
|
||||
**REQ-M-W-4: het voertuig wordt aangedreven door elektromotoren.**
|
||||
**REQ-S-W-5: het voertuig kan remmen doormiddel van regenerative braking.**
|
||||
**REQ-S-W-6: de aandrijving bevindt zich in het wiel.**
|
||||
**REQ-M-W-7: het voertuig heeft een remvertraging van 6 meter per seconde per seconde of meer.**
|
||||
**REQ-M-W-8: het voertuig heeft een draaicirkel van 6 meter of minder.**
|
||||
**REQ-W-1[MH]: het voertuig heeft twee wielen.**
|
||||
|
||||
**REQ-W-2[MH]: het voertuig wordt aangedreven door beide wielen.**
|
||||
|
||||
**REQ-W-3[SH]: het voertuig stuurt met beide wielen.**
|
||||
|
||||
**REQ-W-4[MH]: het voertuig wordt aangedreven door elektromotoren.**
|
||||
|
||||
**REQ-W-5[SH]: het voertuig kan remmen doormiddel van regenerative braking.**
|
||||
|
||||
**REQ-W-6[SH]: de aandrijving bevindt zich in het wiel.**
|
||||
|
||||
**REQ-W-7[MH]: het voertuig heeft een remvertraging van 6 meter per seconde per seconde of meer.**
|
||||
|
||||
**REQ-W-8[MH]: het voertuig heeft een draaicirkel van 6 meter in diameter of minder.**
|
||||
|
||||
## Stabilisatie
|
||||
|
||||
**REQ-M-S-1: Het voertuig wordt actief gestabaliseert**
|
||||
**REQ-S-S-3: Het voertuig kan uit zichzelf weer recht komen te zitten vanaf een roll hoek van 5 graden**
|
||||
**REQ-S-1[MH]: Het voertuig wordt actief gestabaliseerd**
|
||||
|
||||
**REQ-S-2[SH]: Het voertuig kan uit zichzelf weer recht komen te zitten vanaf een roll hoek van 5 graden**
|
||||
|
||||
## VCU
|
||||
|
||||
**REQ-M-C-1: het voertuig wordt bestuurd door middel van een elektronische input, zoals een joystick, dat bedienbaar is door de bestuurder.**
|
||||
**REQ-M-C-2: er is een noodstop aanwezig.**
|
||||
**REQ-C-1[MH]: het voertuig wordt bestuurd doormiddel van een elektronisch input, zoals een joystick, die bedienbaar is door de bestuurder.**
|
||||
|
||||
**REQ-C-2[MH]: er is een noodstop aanwezig.**
|
||||
|
||||
> TODO: miss nog iets over wat die noodstop doet
|
||||
> hoe reageerd het stuur meganisme hierop
|
||||
|
||||
@@ -103,7 +103,6 @@ De huidige status van het project vormt de basis voor verdere ontwikkelingen. De
|
||||
|
||||

|
||||
|
||||
|
||||
## Scope & Afbakening
|
||||
|
||||
### Scope
|
||||
|
||||
@@ -1,7 +1,26 @@
|
||||
---
|
||||
tags: kladjes, elektro, elektro/hr, elektro/hr/pee51
|
||||
---
|
||||
|
||||
[parent](/tPb3Up1fQEuZ86yrJSkYRQ)
|
||||
|
||||
# Superlight Persian Carier (SPC)
|
||||
|
||||
##
|
||||
## inhoudsopgaven
|
||||
|
||||
[toc]
|
||||
|
||||
|
||||

|
||||
|
||||
|
||||
## Stabilisatie
|
||||
|
||||
Voor de Stabilisatie is er een motor driver ontworpen. De specificaties van deze zijn groten deels gebaseerd op specefieke motor. Samen met Automotive is deze uitgekozen.
|
||||
|
||||
### De Motor
|
||||
|
||||
Het is een gevonden op Aliexpress, niet een heel erg betrowbare verkoper, maar we konnen niks anders geschikts vinden voor een redelijke prijs. Deze motor kan de kracht net niet aan continu, maar wel voor korte duur. De snelheid is wel ietse ingeperkt.
|
||||
|
||||
## bijlagen
|
||||
|
||||
|
||||
@@ -1,152 +0,0 @@
|
||||
## Unit Testen Atabilisatie
|
||||
|
||||
### voedingen
|
||||
|
||||
#### benodigdheden
|
||||
|
||||
- 12V voeding
|
||||
|
||||
#### procedure
|
||||
|
||||
1. snel de voeding in op 12V met een stroom berensing van 50 mA
|
||||
2. sluit de 12V voeding aan op de 12V en GND ingnangen op de driver
|
||||
3. meet de uitgangen van de twee voedingen, vul de tabel hieronder in
|
||||
|
||||
| | $5V$ | $12V$ |
|
||||
| -------- | ------:| -------:|
|
||||
| minimaal | $4.5V$ | $11.5V$ |
|
||||
| maximaal | $5.5V$ | $12.5V$ |
|
||||
| gemeeten | | |
|
||||
|
||||
Geslaagd:
|
||||
|
||||
opmergingen:
|
||||
|
||||
### microcontroller
|
||||
|
||||
#### benodigdheden
|
||||
|
||||
- 12V voeding als de voedingen werken, anders met een 5V en 3.3v voeding
|
||||
- computer met Arduino IDE geinstaleerd
|
||||
- USB B kabel naar de computer
|
||||
- ledje met bijhoren de weerstand voor 3.3V
|
||||
|
||||
#### procedure
|
||||
|
||||
1. sluit een ledje aan op een van de GPIO pinnen
|
||||
2. snel de voeding in op 12V met een stroom berensing van 150 mA
|
||||
3. sluit de 12V voeding aan op de 12V en GND ingnangen op de driver
|
||||
4. sluit de USB kabel aan op de computer (dit is veilig omdat de USB alleen verbonden is met ground, de V+ is floating)
|
||||
5. upload een blinky voorbeeld progamma met de GPIO ingesteld van de led
|
||||
6. bekijk of het lidje knipperd
|
||||
|
||||
Geslaagd:
|
||||
|
||||
opmergingen:
|
||||
|
||||
### half brug
|
||||
|
||||
#### benodigdheden
|
||||
|
||||
- als de microcontoller werkt:
|
||||
- 12V voeding als de voedingen werken, anders met een 5V en 3.3v voeding
|
||||
- 30V voor V Motor
|
||||
- computer met Arduino IDE geinstaleerd
|
||||
- USB B kabel naar de computer
|
||||
- ocsiloscoop
|
||||
- zo niet:
|
||||
- 10V voor V motor
|
||||
- signaal generator met twee kanalen
|
||||
- ocsioscoop
|
||||
|
||||
#### procedure
|
||||
|
||||
1. sluit de ociloscoop aan op een van de uitgangen van de drijver (er komt 30V op te staan, beruik de juiste probe; geen juiste probe bij de hand, zelt de voeding voor V motor wa lager)
|
||||
2. snel de voeding in op 12V met een stroom berensing van 150 mA
|
||||
3. sluit de 12V voeding aan op de 12V en GND ingnangen op de driver
|
||||
4. sluit de USB kabel aan op de computer (dit is veilig omdat de USB alleen verbonden is met ground, de V+ is floating)
|
||||
5. upload een test progamma die de PWM aansuurt voor de FET's
|
||||
- de PWM per half bridge zijn aangesloten op de a en b uitganen van 1 timer per half brug. zorg dat een van de uitput geinverteerd is en de twee vergeleijk waardes zo zijn zodat er een korte dead time is. ze mogen nooit tegerlijk hoog zijn!
|
||||
6. bekijk het signaal op de osciloscoop
|
||||
7. herhaal de test voor alle drie de half bruggen
|
||||
|
||||
resultaat:
|
||||
|
||||
- brug a:
|
||||
- brug b:
|
||||
- brug c:
|
||||
|
||||
opmerkingen:
|
||||
|
||||
### IMU
|
||||
|
||||
#### benodigdheden
|
||||
|
||||
- een microcontroller met I2C (kan de motoro driver zelf zijn)
|
||||
- computer met Arduino IDE geinstaleerd
|
||||
- USB B kabel naar de computer
|
||||
|
||||
#### procedure
|
||||
|
||||
1. sluit de IMU aan op de motor driver
|
||||
2. snel de voeding in op 12V met een stroom berensing van 150 mA
|
||||
3. sluit de 12V voeding aan op de 12V en GND ingnangen op de driver
|
||||
4. sluit de USB kabel aan op de computer (dit is veilig omdat de USB alleen verbonden is met ground, de V+ is floating)
|
||||
5. upload een blinky voorbeeld progamma met de GPIO ingesteld van de led
|
||||
6. bekijk de serial plotter terwel je de IMU draait.
|
||||
|
||||
Geslaagd:
|
||||
|
||||
opmergingen:
|
||||
|
||||
### stroom meting
|
||||
|
||||
#### benodigdheden
|
||||
|
||||
- 12V voeding (of 5V bij beperking van beschikbaare voedingen)
|
||||
- voeding die 50A kan leveren (of zoveel mogenlijk) voor V motor
|
||||
- bij voorkeur een load die de $50A_{DC}$ kan op nemen, ander kan de uitgang korgesloten worden als de voeding dat toestaat.
|
||||
- multimeter
|
||||
- computer met Arduino IDE geinstaleerd
|
||||
- USB B kabel naar de computer
|
||||
|
||||
#### procedure
|
||||
|
||||
1. sluit de load aan op deen van de uitgangen van de motor driver
|
||||
2. snel de voeding in op 12V met een stroom berensing van 150 mA
|
||||
3. sluit de 12V voeding aan op de 12V en GND ingnangen op de driver
|
||||
4. sluit de USB kabel aan op de computer (dit is veilig omdat de USB alleen verbonden is met ground, de V+ is floating)
|
||||
5. upload een programma die alle high side fet's dicht zet en de low side fet's open
|
||||
6. sluit de voeding voor V motor aan
|
||||
7. meet uitgang van de stroom meeting
|
||||
8. zet de v motor voeding uit en verlaats de load naar een andere uitgang
|
||||
9. zet de voeding weer aan en meet de stoom meting
|
||||
10. herhaal dit voor de laaste uitgang
|
||||
|
||||
TODO: add meet table
|
||||
|
||||
Geslaagd:
|
||||
|
||||
opmergingen:
|
||||
|
||||
### encoder
|
||||
|
||||
#### benodigdheden
|
||||
|
||||
- een microcontroller met I2C (kan de motoro driver zelf zijn)
|
||||
- computer met Arduino IDE geinstaleerd
|
||||
- USB B kabel naar de computer
|
||||
|
||||
#### procedure
|
||||
|
||||
1. sluit de Encoder aan op de motor driver
|
||||
2. snel de voeding in op 12V met een stroom berensing van 150 mA
|
||||
3. sluit de 12V voeding aan op de 12V en GND ingnangen op de driver
|
||||
4. sluit de USB kabel aan op de computer (dit is veilig omdat de USB alleen verbonden is met ground, de V+ is floating)
|
||||
5. upload een voorbeeld progamma voor de encoder.
|
||||
6. bekijk de serial plotter terwel je de magneer van de encoder draait
|
||||
|
||||
Geslaagd:
|
||||
|
||||
opmergingen:
|
||||
|
||||
@@ -1,13 +1,18 @@
|
||||
---
|
||||
tags: kladjes, elektro, elektro/hr, elektro/hr/pee51
|
||||
---
|
||||
|
||||
## testen
|
||||
[parent](/tPb3Up1fQEuZ86yrJSkYRQ)
|
||||
|
||||
### voedingen
|
||||
## Unit Testen Stabilisatie
|
||||
|
||||
#### benodigdheden
|
||||
### Voedingen
|
||||
|
||||
#### Benodigdheden
|
||||
|
||||
- 12V voeding
|
||||
|
||||
#### procedure
|
||||
#### Procedure
|
||||
|
||||
1. snel de voeding in op 12V met een stroom berensing van 50 mA
|
||||
2. sluit de 12V voeding aan op de 12V en GND ingnangen op de driver
|
||||
@@ -23,16 +28,16 @@ Geslaagd:
|
||||
|
||||
opmergingen:
|
||||
|
||||
### microcontroller
|
||||
### Microcontroller
|
||||
|
||||
#### benodigdheden
|
||||
#### Benodigdheden
|
||||
|
||||
- 12V voeding als de voedingen werken, anders met een 5V en 3.3v voeding
|
||||
- computer met Arduino IDE geinstaleerd
|
||||
- USB B kabel naar de computer
|
||||
- ledje met bijhoren de weerstand voor 3.3V
|
||||
|
||||
#### procedure
|
||||
#### Procedure
|
||||
|
||||
1. sluit een ledje aan op een van de GPIO pinnen
|
||||
2. snel de voeding in op 12V met een stroom berensing van 150 mA
|
||||
@@ -45,9 +50,9 @@ Geslaagd:
|
||||
|
||||
opmergingen:
|
||||
|
||||
### half brug
|
||||
### Half-brug
|
||||
|
||||
#### benodigdheden
|
||||
#### Benodigdheden
|
||||
|
||||
- als de microcontoller werkt:
|
||||
- 12V voeding als de voedingen werken, anders met een 5V en 3.3v voeding
|
||||
@@ -150,3 +155,4 @@ opmergingen:
|
||||
Geslaagd:
|
||||
|
||||
opmergingen:
|
||||
|
||||
|
||||
50
markdown/unittest_stuursysteem.md
Normal file
50
markdown/unittest_stuursysteem.md
Normal file
@@ -0,0 +1,50 @@
|
||||
---
|
||||
tags: kladjes, elektro, elektro/hr, elektro/hr/pee51
|
||||
---
|
||||
|
||||
[parent](/tPb3Up1fQEuZ86yrJSkYRQ)
|
||||
|
||||
# unit testen Stuur systeem
|
||||
|
||||
## unit test controller
|
||||
|
||||
- computer met Arduino IDE geinstaleerd
|
||||
- een USB-C kabel aangesloten van de microcontroller naar een computer
|
||||
- een controller om het voertuig mee te besturen
|
||||
|
||||
1. Upload het programma naar de esp32
|
||||
2. pair de controller via bluetooth met de esp32
|
||||
3. check voor de waardes op je computer
|
||||
4. druk knoppen in en beweeg joysticks
|
||||
5. kijk of er waardes binnenkomen.
|
||||
|
||||
de test is geslaagd wanneer alle knoppen consistent een waarde terug kunnen sturen naar de terminal van de Arduino IDE
|
||||
|
||||
|
||||
## unit test Actuator
|
||||
|
||||
- voeding die minimaal 24 volt aankan
|
||||
- computer met Arduino IDE geinstaleerd
|
||||
- een USB-C kabel aangesloten van de microcontroller naar een computer
|
||||
- een controller om het voertuig mee te besturen
|
||||
|
||||
1. sluit de voeding aan op de motorcontroller met 24 volt en een stroombegrensing van 2A
|
||||
2. verbind de PWM en DIR pinnen tussen de eps32 en motorcontroller
|
||||
3. pair de controller met de esp32
|
||||
4. beweeg de linker joystick van links naar rechts.
|
||||
5. check de reactie van het wiel
|
||||
|
||||
de test is geslaagd wanneer de controller het wiel links en rechts kan draaien en het wiel stopt in de aangegeven richting en niet te zijn eigen grens overschrijt.
|
||||
|
||||
## integratie test VCU
|
||||
|
||||
- computer met Arduino IDE geinstaleerd
|
||||
- een USB-C kabel aangesloten van de microcontroller naar een computer
|
||||
- een controller om het voertuig mee te besturen
|
||||
|
||||
1. sluit de de motor en de stabilisatie units met de VCU
|
||||
2. pair de controller met de esp32
|
||||
3. beweeg de rechter joystick omhoog en omlaag
|
||||
4. check de reactie met het wiel en de stabilisator
|
||||
|
||||
de test is geslaagd wanneer de controller de motor kan aansturen en de stabilisatie zijn vermogen kan varieren gebaseerd op het wiel
|
||||
Reference in New Issue
Block a user